
5G移动通信网的定位技术发展趋势
2022-02-14 08:40李健翔
移动通信 2022年1期
李健翔
(大唐移动通信设备有限公司,北京 100083)
0 引言
(1)移动通信网络定位起源
移动通信网络定位技术最早起源于美国,1996 年,美国联邦通信委员会(FCC)强制要求所有无线业务提供商,在移动用户出发紧急呼叫时,必须向公共安全服务系统提供用户的位置信息和终端号码,以便对用户实施紧急救援工作,并要求到2001 年10 月,67%的呼叫定位精度达到125 m。美国联邦通信委员会这一规定,明确了提供E-911 定位服务是移动通信网络必备的基础功能。此后,日本、德国、法国、瑞典、芬兰等国家纷纷推出各种各具特色的商用定位业务。随着我国移动通信的蓬勃发展,基于位置的业务近年来在我国消费者领域呈现了爆发式增长。
(2)5G 垂直领域对定位业务的需求分析
在4G 通信网中,利用LTE 移动通信系统提供的位置服务,主要的应用场景有如下三类:
场景一:紧急救援,如紧急救护、紧急呼叫场景下对用户的定位。
场景二:各种基于位置的信息服务,如车载GPS 的应用、交通信息、天气信息、导航信息和导游服务等。
场景三:基于位置触发的服务,如基于位置的管理信息和计费等;或者跟踪及资产管理服务,如车辆调度/跟踪/监控/防盗、物资跟踪和老人儿童监护服务等。
在5G 移动通信中,根据5G 应用及业务特点,预计有如下定位场景需求[1]:
场景一:基于位置的信息服务,比如基于位置的广告业务,共享单车、AR 的精确定位等。
场景二:工业和电子医疗领域位置服务,比如工业应用资产管理与追溯、遥感遥测终端、病人监管等。
场景三:紧急救援服务。
场景四:道路相关服务,如交通管制、道路收费管理等。
场景五:铁路、海洋等领域相关位置服务。
场景六:空中领域相关位置服务,比如无人机(UAV)精确定位或无人空间监视。
场景七:多种定位方式的位置服务。
通过5G 与4G 定位业务场景对比分析,可以看到,5G 定位业务场景更丰富,其覆盖度、精确度、时延、移动速度等各方面指标要求远高于4G。从消费者领域转移到了更为广泛的垂直领域,特别是室内定位业务的诉求越来越多,精度要求和移动速度指标大大提升。目前位置信息服务(LBS,Location-Based Service)在国防军事、交通运输、公共安全等领域作用日益凸显。
1 移动通信网高精度定位技术
1.1 4G通信网络定位技术现状
现有4G 移动通信网相关的定位技术主要有:
(1)基于全球导航卫星系统(GNSS)的辅助式全球卫星导航系统A-GNSS。3GPP 协议框架下的A-GNSS包括了北美的全球导航系统GPS,中国的北斗全球导航系统,俄罗斯的GLONASS,欧盟的Galileo,以及印度、法国、日本等其他区域性系统。
(2)基于4G 移动通信网络的OTDOA 和E-CID 技术。
(3)基于Wi-Fi、蓝牙、传感器等独立于移动通信网的定位技术。
目前产业界应用最广泛的定位技术是A-GNSS 技术,通过移动网络播发卫星数据,能够帮助定位终端快速搜星,极大降低了定位时延,减少了终端功耗,提高了定位效率。
但是A-GNSS 的缺陷为在室内和密集城区中卫星信号弱,终端搜星困难。目前还没有一种单一的定位技术能够满足上述5G 定位场景的所有需求。因此,在5G 网络将定位技术研究重点放在了不能满足定位要求的场景上(图1)[2]。特别是室内覆盖和密集覆盖场景,是急需提升性能的场景。同时,这两类场景也是移动通信网络覆盖相对密集的区域。在5G 网络架构下,利用蜂窝网进一步提升定位精度在5G 网络成为了可能。

图1 5G定位需求场景
1.2 5G网络定位新特性
5G 通信以高速率、低时延、大量连接等为特征,其关键技术包括大规模天线阵列、超密集组网、新型多址、全频谱接入和新型网络架构等。5G 普遍采用毫米波通信,由于毫米波优良的方向性,可以实现精确的测角、测距等,能得到比4G 定位方法更高的精度,从而实现精确的基站定位。大规模天线技术具有更高的自由度,可以实现更高精度的测距和测角特性,特别是基于AOA 的定位方法在5G 将会具有更高的精度。基于DL-TDOA 和UL-TDOA、小区ID 或E-CID 等已知定位技术,利用定时测量来定位UE,带来了新的性能界限(特别是在高频带使用宽带信号)。
同时,新的网络架构也为高精度定位服务带来了低延迟、高可靠性和高通信服务的可用性。
这里对新的5G 定位技术的需求总结如下:
(1)希望新的5G 定位技术既能支持室内,又能支持室外场景定位需求。
(2)希望新的5G 定位技术利用好5G 网络的高带宽、大规模天线阵列和网络传输功能,以支持网络中大规模的终端定位需求。
(3)希望新的5G 定位技术应该既能支持基于5G NR 信号的无线网络定位技术,又能支持非NR 信号的定位,例如GNSS、蓝牙、Wi-Fi、TBS、传感器等。并且这些基于NR 信号和非基于NR 的定位技术还可以混合使用,以进一步适应定位场景和定位精度需求。
2 5G定位网络架构
面向5G 定位场景需求,基于5G 网络的高精度定位技术孕育而生。5G 网络定位相关规范在3GPP 标准制定中分为两个阶段,第一个阶段是将LTE 网络中的定位技术平滑移植到NR(5G)网络,NR R15 版本中已经体现。第二阶段是针对5G 新增场景需求,面向5G 新的网络架构,提出新的高精度定位方法和定位架构(图2),将在R16 版本中实现。

图2 5G定位网络架构
图2 中,TP 为定位信号发射点;TRP 为定位信号发射接收点。
5G 移动通信网络的定位技术包含了如下三大类技术:
第一类,基于5G 无线接入网络的定位技术,包括:
(1)下行到达时间观测差定位法(DL-TDOA,Downlink Time Difference of Arrival);
(2)多小区往返时间定位法(Multi-RTT,Multiplecell-Round Trip Time);
(3)上行到达时间观测差定位法(UL-TDOA,UplinkTime Difference of Arrival);
(4)下行角度定位法(DL-AoD);
(5)上行到达角度定位法(UL-AoA,Uplink Angle of Arrival);
(6)增强小区标识定位法(E-CID,Enhanced Cell ID)。
可以看到,相对于4G 无线通信系统的OTDOA 和E-CID定位技术,基于移动通信网络定位技术在5G 时代大幅增强了。
第二类,独立于无线接入网的定位技术,包括:
(1)辅助全球导航卫星系统定位(A-GNSS,Network-Assisted GNSS Methods);
(2)基于蓝牙(Bluetooth)的定位;
(3)基于Wi-Fi 的定位;
(4)基于传感器的定位:惯性测量单元(IMU,Inertial Measurement Unit)等。
在R16 版本中,大唐移动将我国自主研发的北斗新一代全球导航系统——北斗三号,引入了5G 系统,实现了移动通信领域支持北斗全球导航系统,为我国自主全球导航的产业应用铺垫了基石。
第三类,基于无线接入网和独立于无线接入网的定位技术的混合定位。
3 基于5G信号的高精度定位技术方案
3.1 下行到达时间观测差定位法DL-TDOA
DL-TDOA 与4G OTDOA 原理类似,终端测量两个站点下行参考信号到终端的时间差(图3),并上报给网络。定位服务器根据多个参考信号时间差RSTD(Reference Signal Time Difference),利用罗兰导航技术的逆应用,已知时间差和基站位置,解方程组,从而获得终端位置估计。
5G 的大规模天线技术可以实现更高精度的测距以及更多的方向信息,进一步优化定位算法。
Rel-16 NR 标准没有定义NR DL-TDOA 定位的具体算法。终端测量两个TRP(其中一个为参考TRP)发射的下行定位参考信号(DL PRS)的到达时间之差(RSTD),由每个测量值(DL PRS RSTD)转换为距离,从而构成一条双曲线,双曲线的焦点为这两个TRP 所在的位置,双曲线上的任意点到两个TRP 的距离之差为RSTD 测量值,UE即位于双曲线之上的某个点。若UE 由N个TRP 获得N-1个DL PRS RSTD 测量值,则可构成一个有N-1 个双曲线方程的方程组,UE 的位置可由解算该双曲线方程组得到。图3 显示了一个用NR DL-TDOA 进行定位的例子,其中UE 由3 个TRP 得到2 个DL PRS RSTD 测量值RTSD2,1和RTSD3,1(TRP1 为参考TRP),由RTSD2,1和RTSD3,1构成条2 个双曲线,UE 位置可由解算这2 个双曲线的交点得到。

图3 NR DL-TDOA定位方法
一般而言,每个DL PRS RSTD 测量值都有一定的测量误差。因而,利用NR DL-TDOA 定位时,希望UE 能从较多的TRP 获得更多和更准确的RSTD 测量值,以降低测量误差对UE 位置解算的影响,得到更准确的UE 位置。这要求合理和优化地设计DL PRS 信号(如信号序列、映射模式和静音模式等),让UE 由尽可能多的TRP 接收到DL PRS 信号并获得准确的RSTD 测量值。
3.2 多小区往返时间定位法Multi-cell RTT
Multi-cell RTT 技术是5G 新引入的高精度定位技术。基于到达时间TOA 的原理,终端以基站为圆心,确定终端二维坐标需要3 个圆,终端在3 个圆的交点(图4)。终端测量下行参考信号,获得发送接收时间差;基站测量单元捕获上行参考信号,测量发送接收时间差,汇总到定位服务器,解方程组。以往移动通信网络定位DL-TDOA技术要求各个基站严格同步,但Multi-cell RTT 技术不依赖基站间的严格同步,测量精度不会受到基站间的同步精度的影响,但是需要终端知道信号开始传输的确切时刻。

图4 Multi-RTT定位方法
TOA 原理:根据测量接收信号在基站和移动台之间的到达时间,然后转换为距离,从而进行定位。该方法至少需要三个基站,才能计算目标的位置。
NR Multi-RTT 定位方法采用的测量值,为UE 测量的来自各TRP 的DL PRS 的到达时间与UE 发送定位参考信号(SRS-Pos)的时间差(称为UE Rx-Tx 时间差),和各个TRP 所测量的,来自UE 的SRS-Pos 的到达时间与TRP发送DL PRS 的时间差(称为gNB Rx-Tx 时间差)。如图5 所示,UE 与某TRP 之间的信号往返行程时间(RTT),可由UE 由该TRP 的DL PRS 所测量的UE Rx-Tx 时间差加上该TRP 由该UE 的SRS-Pos 所测量的 gNB Rx-Tx 时间差得到,而UE 与该TRP 的距离可由1/2 RTT 乘以光速得到。

图5 信号往返行程时间(RTT)示意图
3.3 上行到达时间观测差定位法UL-TDOA
UL-TDOA 与DL-TDOA 原理类似,但它是基于上行定位参考信号的定位技术。由基站测量终端发射的信号到达不同基站的传输时间差,网络根据上行参考信号,多个基站测量终端到达时间差(图6),然后把测量值上报给定位服务器,利用双曲线算法计算出UE 的位置。
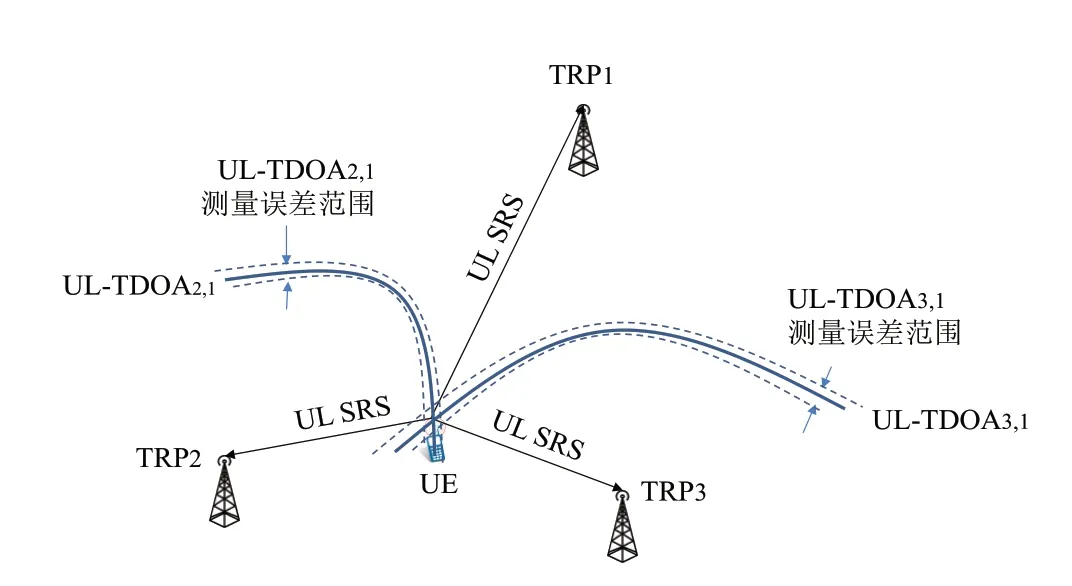
图6 UL-TDOA定位方法
在NR UL-TDOA 定位方法中,服务基站首先要给UE 配置发送上行链路定位参考信号(SRS-Pos)的时间和频率资源,并将SRS-Pos 的配置信息通知给定位服务器。定位服务器(LMF)将SRS-Pos 的配置信息发给UE 周围的TRP。各TRP 根据SRS-Pos 的配置信息去检测UE 发送的SRS-Pos 并获取SRS-Pos 到达时间与TRP本身参考时间的相对时间差(UL RTOA)。UL-TDOA一般采用基于网络的定位方式,即各TRP 将所测量的UL RTOA 传送给LMF,由LMF 利用各TRP 提供的UL RTOA 以及其他已知信息(例如TRP 的地理坐标)来计算UE 的位置。
3.4 下行角度定位法DL-AOD
终端测量上报下行参考信号到达终端的接收功率,网络根据发送波束方向来估计终端的位置角度。5G 采用的大规模天线技术,具有更高的自由度,可以实现更高精度的测距和测角特性。在NR DL-AOD 定位方法中,UE根据定位服务器(LMF)提供的周围TRP 发送下行定位参考信号DL PRS 的配置信息,来测量各TRP 的DL PRS信号,并将DL PRS RSRP 测量值上报给LMF。LMF 利用UE 上报的DL PRS RSRP 以及其他已知信息(例如各TRP 的各个DL PRS 的发送波束方向)来确定UE 相对各TRP 的角度,即DL-AOD,然后利用所得的DL-AOD 以及各TRP 的地理坐标来计算UE 的位置。
3.5 上行到达角度定位法UL-AOA
网络根据上行参考信号,多个基站测量终端发射的参考信号到达基站的方向。每个方向就是一条终端指向基站的直线,通过多个基站测量就可以得到多条直线,这些直线的交点即为待定位终端的估计位置,解方程组,获得终端位置。5G 采用的大规模天线技术具有更高的自由度,可以实现更高精度的测距和测角特性。
Rel-16 NR 标准既没定义TRP 如何由UE SRS-Pos获取UL AOA,也没有定义LMF 如何由UL AOA 来确定UE 的位置。估计UL AOA 的算法有多种,简单的方法是直接用接收波束的方向来作为UL AOA。这种简单方法的角度估计分辨率较低。分辨率较高的方法是通过接收天线阵列接收UL SRS-Pos 信号(图7),利用信号和噪声子空间之间的正交性,通过有效的算法(例如MUSIC、ESPRIT 等)将观察空间分解成两个子空间:信号子空间和噪声子空间,并由信号子空间估计SRS 信号的到达方向UL AOA。一旦获得UL AOA,就可利用已有的算法来计算出UE 的位置(图7)。
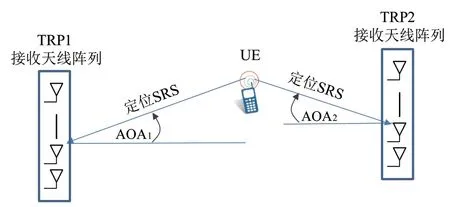
图7 NR UL-AOA定位示意图
3.6 增强小区标识定位法E-CID
Cell-ID 是过去3G 移动网络中最简单的一种定位技术,定位算法利用手机所处蜂窝小区和小区覆盖半径来进行粗略估算,后来LTE 结合了时间提前量和方位到达角进一步提升定位精度。
在5G 网络下,利用大规模多天线技术,根据测量终端发送信号及方向(图8),联合终端所在小区ID 信息,计算目标的位置。常用的方法是由UE 所上报的RRM 测量值(参考信号接收功率或参考信号接收质量),结合假设的信道路径损耗模型推导出UE 与发送参考信号的TRP之间的距离,然后由TRP 的地理坐标、UE 与TRP 的距离以及TRP 参考信号发送方向计算出UE 的位置。由于假设的信道路径损耗模型与真实信道路径损耗的差异,以及RRM 测量值的测量误差,所推导的UE 和TRP 之间的距离与UE 和TRP 之间的真实距离误差一般较大,因而E-CID 定位的精度相对于NR 的其他定位方法较低。

图8 E-CID定位方法
4 基于5G信号的高精度定位技术性能评估
3GPP 组织通过对基于5G 无线信号的定位技术的初步评估,主要考虑政策监管需求和商业应用需求。以覆盖80% 的用户为基准定义了最低性能目标[3]:针对政策监管的常规定位需求,水平方向的定位误差小于50 m,垂直方向的定位误差小于5 m,定位时延小于30 s;针对商业应用定位需求,水平方向的定位误差室内小于3 m,室外小于10 m,垂直方向的定位误差小于3 m,定位时延小于1 s。
3GPP 给出了基于蜂窝网络的5G 候选定位技术方案的精度性能的评估结果[3]:
(1)面向室内覆盖场景,上述六种定位技术能够满足政策监管需求(美国911 紧急呼叫)和商业应用需求。
(2)面向密集城区微蜂窝覆盖场景,上行AoA 定位技术无法支持商业应用需求。
(3)面向宏站覆盖场景,下行技术能够满足5G 的政策监管需求和商业应用需求,但是上行技术无法满足政策监管需求和商业需求,Multi RTT 无法满足室外终端的商业应用需求。
(4)上行和下行的定位技术方案的精度最高到米级,无法达到分米级甚至厘米级的定位精度。
5 高精度定位发展趋势
从目前高精度定位网络架构来看,5G 移动定位的部署趋势将是通信定位一体化、本地化:
(1)一体化:基于现有的蜂窝网络,建设一个基于移动通信网的高精度天地一体化定位网络。定位发射单元测量单元与通信设备一体化,利用传统的室内分布系统,建设基于移动通信信号的定位发射单元和测量接收单元,低成本地建设地面高精度覆盖网络,实现高精度室内定位覆盖诉求。
(2)本地化:将传统的基于核心网的定位服务功能单元进行本地化处理。定位服务器功能下沉到无线接入网单元,本地完成位置估算存储功能,提升定位服务功能在移动通信网中的快速部署、升级、响应能力。
随着移动定位业务从4G 走向5G,从消费者领域走向垂直领域,工业物联网场景和车联网场景的高精度定位诉求将是后续高精度定位发展场景。以下是目前3GPP 计划重点研究的高精度定位场景需求:
(1)工业物联网的场景下(特别是工厂/ 园区内),由于工业化操作和移动资产的管理,对定位精度需求定位精度要求将会在20 cm 之内,甚至更低。
(2)在车联网场景下,对车辆间相对位置定位的精度要求将会在0.5 m 之内,车辆前后位置定位精度将会在0.1 m 之内。
(3)总体定位时延将控制在100 ms 之内,在IIOT 中一些实时性更强的场景下,定位时延希望在10 ms 之内。
(4)亚米级精度是未来定位场景的普遍需求。
猜你喜欢
现代装饰(2020年8期)2020-08-24
铁道通信信号(2019年9期)2019-11-25
北京航空航天大学学报(2017年9期)2017-12-18
探索科学(2017年4期)2017-05-04
电子制作(2016年15期)2017-01-15
光学精密工程(2016年3期)2016-11-07
中国交通信息化(2016年8期)2016-06-06
测绘科学与工程(2016年6期)2016-04-17
山东冶金(2015年5期)2015-12-10
发明与创新(2015年29期)2015-02-27
