
声呐浮标四臂阵在不同工作模式下的多波束优化设计
2022-02-13 09:38:32杜子亮
声学与电子工程 2022年4期
杜子亮
(海军装备部,西安,710072)
现有的声呐浮标接收阵在布放后,由电池供电完成信号采集调理和传输工作,电池电量耗尽后即停止工作,因此其工作时长和信号处理的效率会受到电池容量和输出功率的限制,一般仅能维持数个至数十个小时。为了延长浮标的工作时间,在不降低目标探测性能的前提下,本文以声呐浮标四臂阵为例,提出了一种令部分水听器阵元不参与波束形成和目标探测的工作模式,对该工作模式进行仿真分析,并结合 Olen-Compton波束形成方法对其进行多波束优化设计[1-2],使声呐浮标四臂阵在水平360°范围内形成全向均匀分布的多个波束主瓣[3],并通过仿真验证这种工作模式的波束性能。
1 声呐浮标四臂阵模型建立
本节以声呐浮标四臂扩展阵为例,推导阵列流形矢量[4]并绘制静态波束图[5]。浮标十字阵的接收信号几何模型如图1所示,16个水听器阵元均匀分布在xOy平面中以原点为中心、分别沿着x、y轴的正负半轴扩展出去的单臂上,每条单臂上有4个水听器阵元。图中S和S’为入射信号,OA为入射信号在基阵平面的投影,OD为声程差,B和C为作图辅助点,φ为水下目标声源的水平方位角(即声源与基阵中心连线在基阵平面的投影线和参考基阵单臂所在轴线的夹角),θ为水下目标声源的俯仰角(即声源与基阵中心连线和基阵平面法线的夹角)。
假设常规阵元间距为d,则每条臂上最靠近浮标中心参考点的阵元与中心的距离为d/2,由于多臂阵中的每条臂上的水听器阵元相对于浮标中心参考点的距离固定,且均相等,因此可以将多臂阵视为一个多层的四元均匀圆阵,第m层圆环半径为d/2+(m-1)d,其中m可取 1,2,3,4。对于单臂来说,若以原点为参考点,则单臂上每个水听器阵元到原点的距离r即是该层圆环半径。
再设两个相邻单臂关于原点的夹角均为π/2,若以y轴正半轴所在单臂为参考单臂,结合上述r的表达,则其余各单臂的阵元位置可以表示为

根据图1中的几何关系,各水听器阵元接收信号时间延迟量τ可以表示为

式中,γi为两个相邻基阵单臂之间的夹角,i= 0,1,2,3,c为水下声速。由此得出声呐浮标十字阵的阵列流形矢量α(θ,φ)为

式中,γi=iπ / 2(i表示以参考单臂为基准的第i个单臂),rm=d/2 + (m- 1)d(m取0,1,2,3),表示单臂上的水听器阵元数。
2 声呐浮标四臂阵的工作模式
根据上节的结论可以得到声呐浮标基阵的静态波束图,该波束图不考虑水听器接收的信号与干扰,对处于白噪声环境下的各阵元输出直接进行相干叠加。本文对计算后的波束图均进行了归一化处理,得到的声呐浮标四臂阵的静态波束图及其极坐标图如图2所示。

图2 声呐浮标四臂阵全阵元工作的静态波束图
考虑如图3所示的声呐浮标四臂阵,依照本文的工作模式,不需要所有的阵元参与波束形成。假设待测目标位于y轴的右方(即x轴正方向左右各90度的半空域范围内),此时可以令x轴负方向上的4个水听器(记为第四臂)停止工作,该声呐浮标四臂阵退化为T字型阵。

图3 声呐浮标四臂阵几何模型
经过工作模式调整,得到的T字型浮标阵,其静态波束图如图4所示。

图4 4个水听器阵元不参与工作时的静态波束图
对比图2和图4可以得出,当声呐浮标四臂阵的第四臂不参与工作时,y轴方向上的波束幅度相比于全工作模式略有减小,比其他波束主瓣的幅度小约6 dB,而x轴方向上的波束没有变化。该对比结果表明,假设当待测目标出现在声呐浮标一侧时,另一侧臂的水听器可以停止参与波束计算,这种工作模式得到的波束不影响浮标对该目标的探测。
为进一步验证上述结论,本文选择 Olen-Compton波束形成算法结合声呐浮标四臂阵进行多波束优化设计,分频段形成多个波束,并将两种工作模式下的波束图进行对比分析。
3 Olen-Compton算法原理
Olen-Compton波束形成算法[6,7]的大致原理可表述为,通过在波束旁瓣区设置虚拟干扰源,依照MVDR(Minimum Variance Distortionless Response)准则降低对应方位的波束响应,干扰源个数一般为水听器阵元数的2~3倍,在旁瓣区均匀分布。干扰强度越大则波束响应越小,进而控制旁瓣级的衰减程度,其中干扰源的强度可以通过迭代的方式获取。
依照MVDR准则,该算法的权系数可表示为

式中,μ为步长因子,R为干扰协方差矩阵,αs为主瓣方向的响应向量。μ的选择一般采取试凑法,其取值确定之后在迭代过程中不再变动。假设旁瓣区域存在k个干扰源,μ的迭代过程可表示为

这里μk(n+ 1)是第n次调整后第k个干扰源的步长因子,μmax是步长因子允许的最大取值,该取值是为了防止自适应过程发散,若过小会导致收敛速度太慢,过大会导致算法不稳定,因此一般取值为1。式中p(θk,n)是第n次迭代后θk方向上的实际归一化波束响应,D(θk)是θk方向上的期望波束响应(下同),该步长因子的迭代次数会因预成波束的数量和旁瓣级等参数而变动。
干扰协方差矩阵R由干扰源功率决定,干扰源功率的调整方法可表示为

4 多波束优化设计
本节结合 Olen-Compton波束形成方法,针对声呐浮标四臂阵进行多波束优化设计,首先令所有水听器阵元均参与波束形成。考虑到海洋背景噪声和水下目标辐射噪声的宽频带范围(一般为 10 Hz~20 kHz),以及常见主动声呐偏低频的工作频段,本文选择在500~3500 Hz这一频段内进行多波束仿真。针对浮标四臂阵的多波束设计分为低、中、高三个频段,分别形成4个、8个和16个波束,此处选取700、1500和3000 Hz三个频点进行仿真。图5~7分别给出了基于四臂阵所有水听器参与工作时的4个波束、8个波束和16个波束的仿真结果。

图5 十字型16个波束
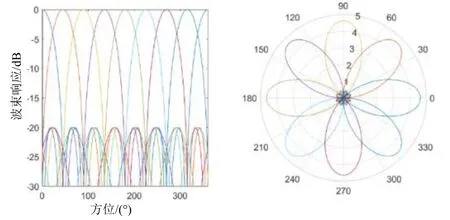
图6 十字型8个波束

图7 十字型4个波束
从所有水听器参与工作时的多波束仿真结果可以看出,采用Olen-Compton方法设计的多波束,旁瓣级均能够控制在-20 dB以下,并且该旁瓣级抑制水平能够根据实际需求随时调整,不会对主瓣幅度的对比分析造成影响。然后令声呐浮标四臂阵的第四臂上的4个水听器停止工作,以T字型的阵型结合 Olen-Compton算法进行波束形成,得到的结果如图8~10所示。

图8 T字型16个波束
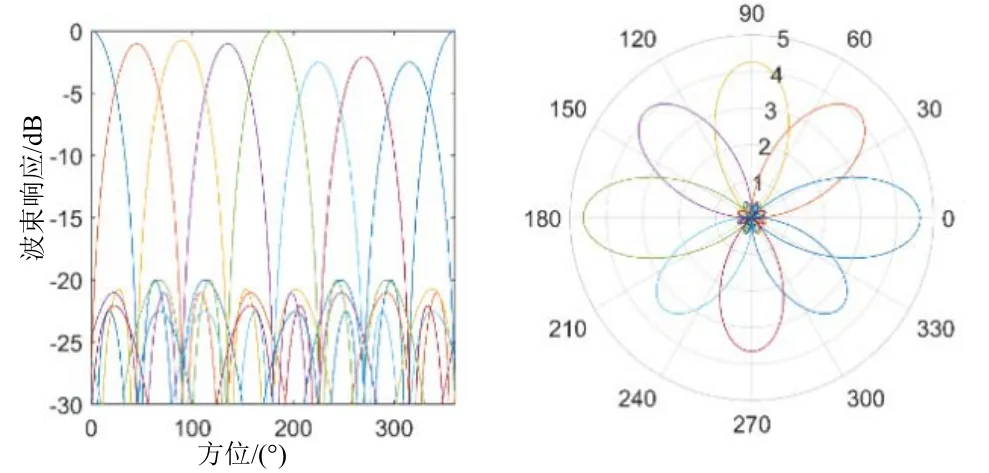
图9 T字型8个波束
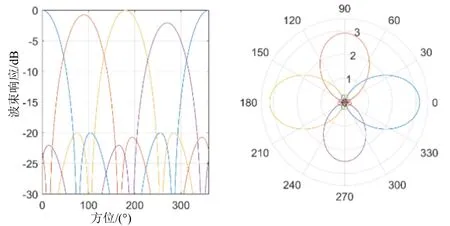
图10 T字型4个波束
5 分析与总结
结合图2、4所示的静态波束图、图5~7所示的十字型多波束图以及图8~10所示的T字型多波束图,可以得到各波束性能的数据对比,如表1所示。

表1 T字型相对于十字型的主瓣幅度衰减对比
由表1的对比分析可以得出:
(1)对于特定空域范围内的待测目标,声呐浮标可以令反方向的水听器阵元停止工作,不参与波束形成和目标探测,该工作模式不影响其余方向上的波束性能,即不会使这些方向上的目标探测能力降低;
(2)形成的波束数量越多,该工作模式下波束主瓣的衰减越明显,由于高频段波束数量变多会使主瓣宽度减小,因此该工作模式提供的待测目标方位能够更为精确。
综合上述分析结果,可以得出结论:由于该工作模式需要预知待测目标的方位,因此在通过全阵元波束形成确定目标的大致方位、进入搜索转跟踪阶段后,浮标阵可以采用这种令一部分阵元不参与波束形成的工作模式,不断调整波束指向以维持目标跟踪,该工作模式能够节省声呐浮标的耗电量、延长其工作时间,同时保证波束性能和目标探测能力不受影响。
猜你喜欢
电声技术(2022年3期)2022-04-28 00:22:50
应用科技(2020年1期)2020-06-18 02:02:36
诗潮(2019年8期)2019-08-23 05:39:48
水下无人系统学报(2018年5期)2018-11-09 07:40:54
意林·少年版(2018年10期)2018-05-30 16:24:42
诗潮(2017年4期)2017-12-05 10:16:18
声学与电子工程(2017年1期)2017-06-22 11:30:07
西北工业大学学报(2015年3期)2015-12-14 13:08:44
声学技术(2015年1期)2015-09-07 06:44:52
诗潮(2015年3期)2015-03-20 14:40:24
