
兰州空间技术物理研究所吸气式电推进技术进展
2022-02-12 09:45吴先明贾连军蒲彦旭贺亚强王尚民李艳武
真空与低温 2022年1期
吴先明,耿 海,贾连军,蒲彦旭,贺亚强,王尚民,李艳武
(1.兰州空间技术物理研究所 真空技术与物理重点实验室,兰州 730000;2.重庆三峡学院,重庆 404100)
0 引言
对于高分对地观测卫星,轨道越低,获得的对地观测分辨率越高。卫星在超低轨道(160~250 km)上运行,为超高速无线通信开辟了广阔的应用市场。但是,卫星轨道越低,大气阻尼产生的阻尼力越大,必须用卫星动力系统进行阻尼补偿。吸气式电推进以环境气体为工质,作为超低轨道卫星轨道维持的动力,使卫星较少或无须携带工质即可在超低轨道上停留及机动,可解决现有技术不能使航天器长期停留、机动于超低轨的难题,是一项极具发展前景的航天动力前沿技术。
自1956年美国Demetriades[1]首先提出吸气式电推进技术的概念以来,各国都开展了相关技术研究。2003年日本空间宇宙科学研究所Nishiyama[2]设计了一种由直管拼接成的气动结构,2013年该研究所Tagawa等[3]对这种结构进行了原理性地面试验验证。2005年日本东京大学提出了一种利用管状冲压原理进行气体收集增压的气动结构,增压能力可达500倍。2007年ESA的Dicara等[4]提出了一种类似管状的多通道气动结构用于气体收集与增压。2012年美国布赛克公司Hohman[5]采用直接模拟Monte Carlo方法分析了直管收集空间气体的效率。2011年ESA的Cifali等[6-7]采用PPS1350-TSD霍尔推力器和RIT-10离子推力器研究了用N2和O2作电推力器工质的点火性能。2013年英国南安普敦大学Feili等[8]采用射频离子推力器研究了用N2和O2作电推力器工质的点火性能,试验结果与Cifali等的试验结果类似。国外最具代表性的研究机构是意大利SITAEL公司,该公司[4,9]首次试验验证了其研制的吸气式电推进系统RAM-EP的功能。
国内开展吸气式电推进技术研究的机构主要有兰州空间技术物理研究所、北京卫星环境工程研究所[10]、北京航空航天大学等。本文主要介绍兰州空间技术物理研究所吸气式电推进技术研究发展现状。包括技术研究发展概述、吸气式电推进系统总体技术方案研究、气体收集增压技术研究、电推力器技术研究、吸气式电推进系统应用分析,最后进行总结,介绍后续即将开展的相关研究。
1 吸气式电推进技术研究概述
兰州空间技术物理研究所[11-12]在电推进领域,尤其是在离子电推力器技术方面开展了大量研究,对吸气式电推进技术的研究历史接近10年。气体收集增压装置[13-15]是吸气式电推进系统的核心部件,在研制的吸气式电推进系统中,气体收集增压装置采用主被动结合的气体收集和增压方式,即先用管道阵列多孔板将收集到的气体增压后,再用涡轮分子泵和涡旋泵对收集的气体进行增压,这样可以兼顾气体收集效率和增压比两个参数。气体增压比的提高增加了气体的密度,有利于电推力器工作。兰州空间技术物理研究所开展吸气式电推进技术研究主要分为两个阶段。早期,采用Hall型电推力器作为吸气式电推进系统的推力器,并进行了N2、O2工质点火试验。第二阶段,即2017年之后,对5 cm直径ECR电推力器进行了研究[16-17],利用N2、O2工质进行了点火试验,由于ECR电推力器具有较高的效率,同时没有传统电推力器的空心阴极,可以避免空心阴极的中毒失效,因此将其作为吸气式电推进系统的推力器。为了进一步提高电推力器的推力,目前采用10 cm直径ECR电推力器作为吸气式电推进系统的推力器。同时,还开展了超高比冲电推进技术研究[18-20],该技术也可用在吸气式电推进系统电推力器上。此外,还开展了吸气式电推进系统应用于超低地球轨道平台的可行性研究[21]。
2 吸气式电推进系统总体技术方案研究
吸气式电推进系统由气体收集增压装置和电推力器两部分组成,如图1所示。气体收集增压装置由多孔板、涡轮分子泵、涡旋泵、气体存贮室和气体稳压室等组成。多孔板为蜂窝状管道阵列,当超低轨飞行的航天器以7.8 km/s速度飞行时,多孔板可收集相对运动速度约7.8 km/s的空间气流并使其增压,涡轮分子泵将多孔板输出的气体进一步增压,涡旋泵将涡轮分子泵输出的气体引入后端的气体存贮室中。为了消除收集和增压后气体的波动,气体存贮室后面连接气体稳压室,以保证电推力器稳定工作。电推力器将收集、增压、稳定后的环境气体工质电离、加速引出、形成推力,抵消环境气体对超低轨运动的航天器产生的阻尼力。

图1 吸气式电推进系统组成图Fig.1 Composition of the air breathing electric propulsion system
3 气体收集增压技术研究
气体收集增压单元主要收集环境气体,并将其增压至电推力器可工作的压力值。气体收集增压装置的气体收集和增压组件主要为多孔板和涡轮,分别如图2和图3所示。多孔板的主要设计参数为管截面形状、管长和长径比等。涡轮的主要设计参数为叶片速度比、叶列组合方式、叶列倾角、涡轮上下游2个结构参数L1和L2,如图4所示。
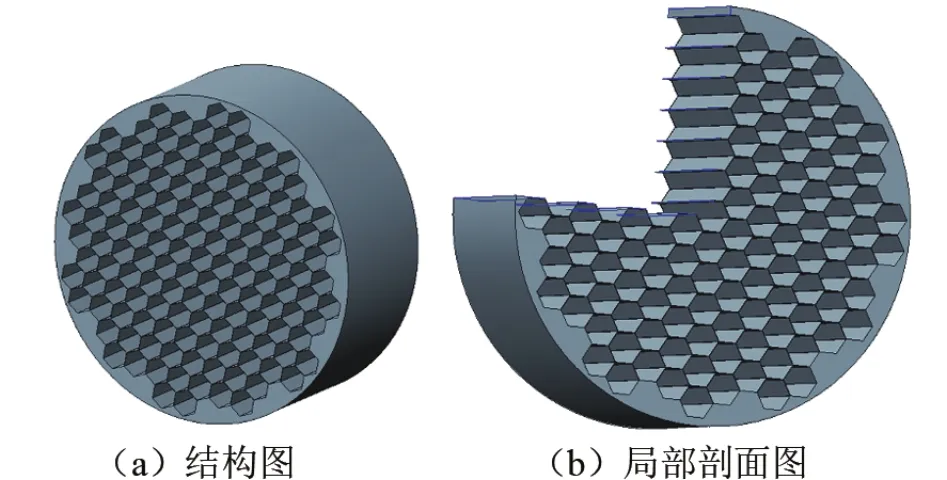
图2 多孔板结构图Fig.2 Structure of the multi-pipe device
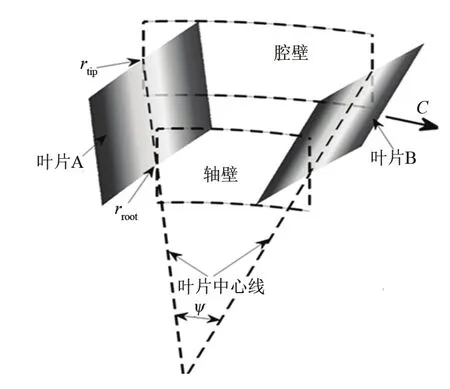
图3 涡轮叶片3D模型图Fig.3 3D model of the turbine leaf
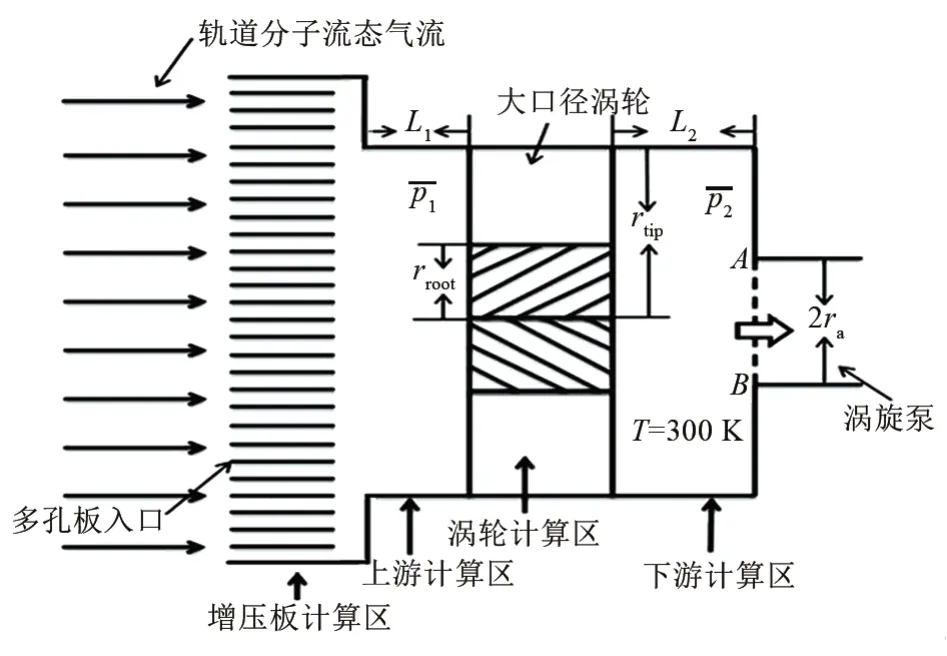
图4 气体收集增压装置主要结构Fig.4 Main structure of the gas collecting and compressing device
采用Monte Carlo方法,包括试验粒子Monte Carlo(TPMC)方法和直接模拟 Monte Carlo(DSMC)方法确定气体收集增压装置的设计参数。TPMC方法主要用于分子流态问题的求解。DSMC方法由Bird[21-23]发展而来,主要用于过渡流态问题的求解,本文所设计的多孔板和涡轮分别处于自由分子流态和过渡流态,适合采用Monte Carlo方法进行数值模拟。
3.1 气体收集增压装置参数设计
(1)多孔板管道横截面形状。图5所示为不同长度的管道,横截面面积为π的任意正多边形管的分子流通过率,n表示正多边形管截面边数。从图5可以看出,分子流的通过概率与正多边形管截面形状无明显关联,采用不同边数的截面管,定向分子流的通过概率相差不到4.6%。因此,只要管截面不变形,气体收集效率就不会明显下降。
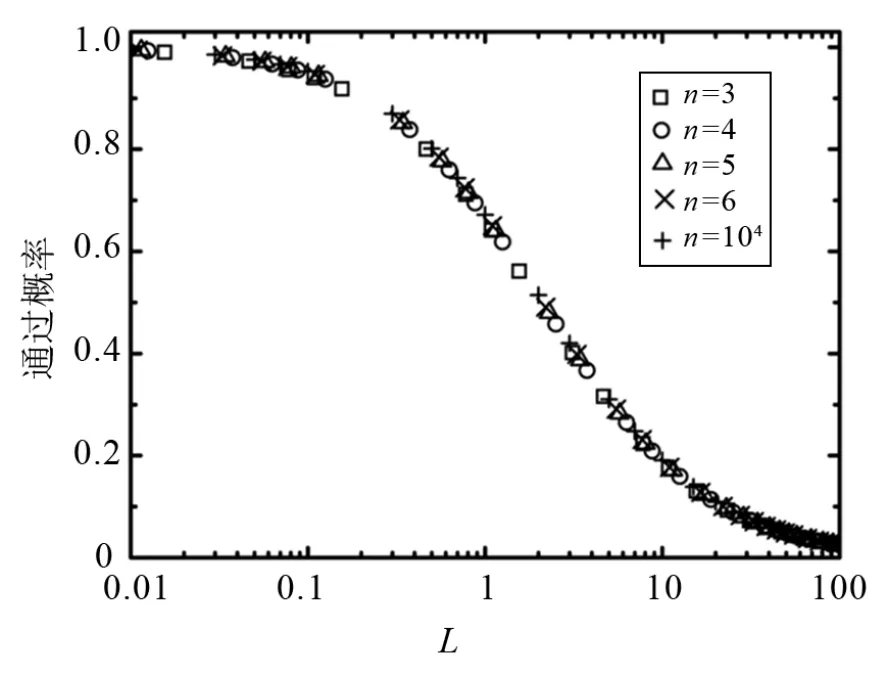
图5 横截面面积为π的任意正多边形管的分子流通过率Fig.5 The molecule flow passing probability from the pipe with n-polygon section
(2)结构参数L1和L2。气体收集效率η与L1和L2的关系如图6所示,从图中可知,当L1和L2均取0.15时,气体收集效率η为0.438;当L1或L2取0.5时(对应的L2或L1仍为0.15),气体收集效率η分别为0.444和0.442。L1和L2均取0.15时,气体收集效率为极大值0.444的98.6%。因此,为使装置更紧凑,L1和L2均取为0.15。
(3)多孔增压板的管道参数Lt/R优化。Lt和R分别是多孔板管道的长度和多边形截面半径。如图7所示,当涡轮叶片速度比C=0.8时,气体收集效率η在Lt/R=7.0时达到最大值,为0.438;当C=2.0时,气体收集效率η在Lt/R=4.5~5.0时达到最大值,约为0.597。若组成多孔板的管道细长,即Lt/R较大,分子通过多孔板进入上游计算区的概率较低,气体收集效率也较低;若Lt/R较小,空间轨道上通过多孔板对上游计算区的抽速就较大,即返回空间的气流量大,气体收集效率也较低。因此,C恒定时,气体收集效率在一定的Lt/R值范围内存在极大值,该极大值处的Lt/R随C的增加而下降。本文Lt/R取值为5。
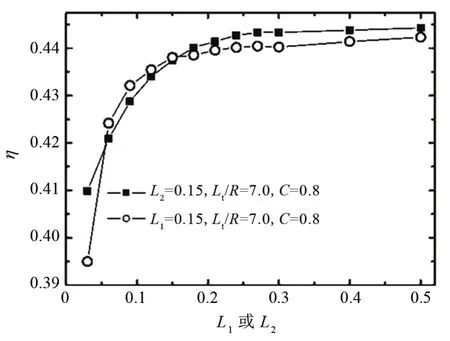
图6 气体收集效率η与L1和L2的关系Fig.6 The relationship between gas collecting efficiency and L1and L2
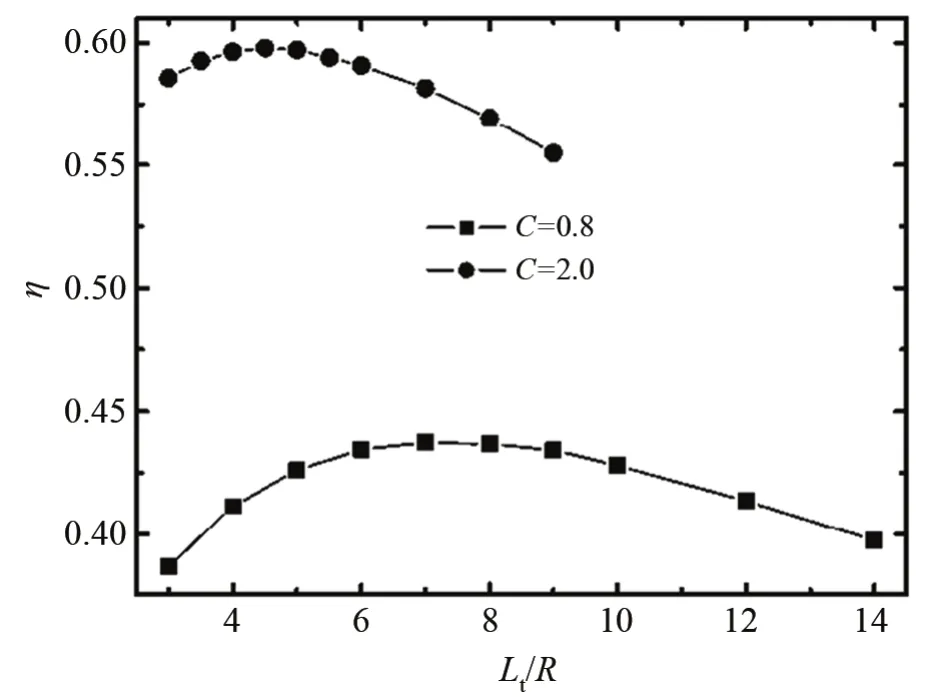
图7 气体收集效率η与多孔板管道参数Lt/R的关系Fig.7 The relationship between gas collecting efficiency η and Lt/R
(4)涡轮叶片速度比。气体收集效率η、多孔板压缩比K1和涡轮压缩比K2与涡轮叶片速度比C的关系如图8所示。从图8(a)可以看出,当C≤1.2时,气体收集效率η随C的增加迅速增大;当C>1.2时,η的增长趋缓。这主要是因为随着C的增加,涡轮抽速先快速后缓慢地增加。在图8(b)中,涡轮出口处的气体不断被涡旋泵抽走,因此K2随C的增加快速地线性增大。本文中叶片速度比选为2。
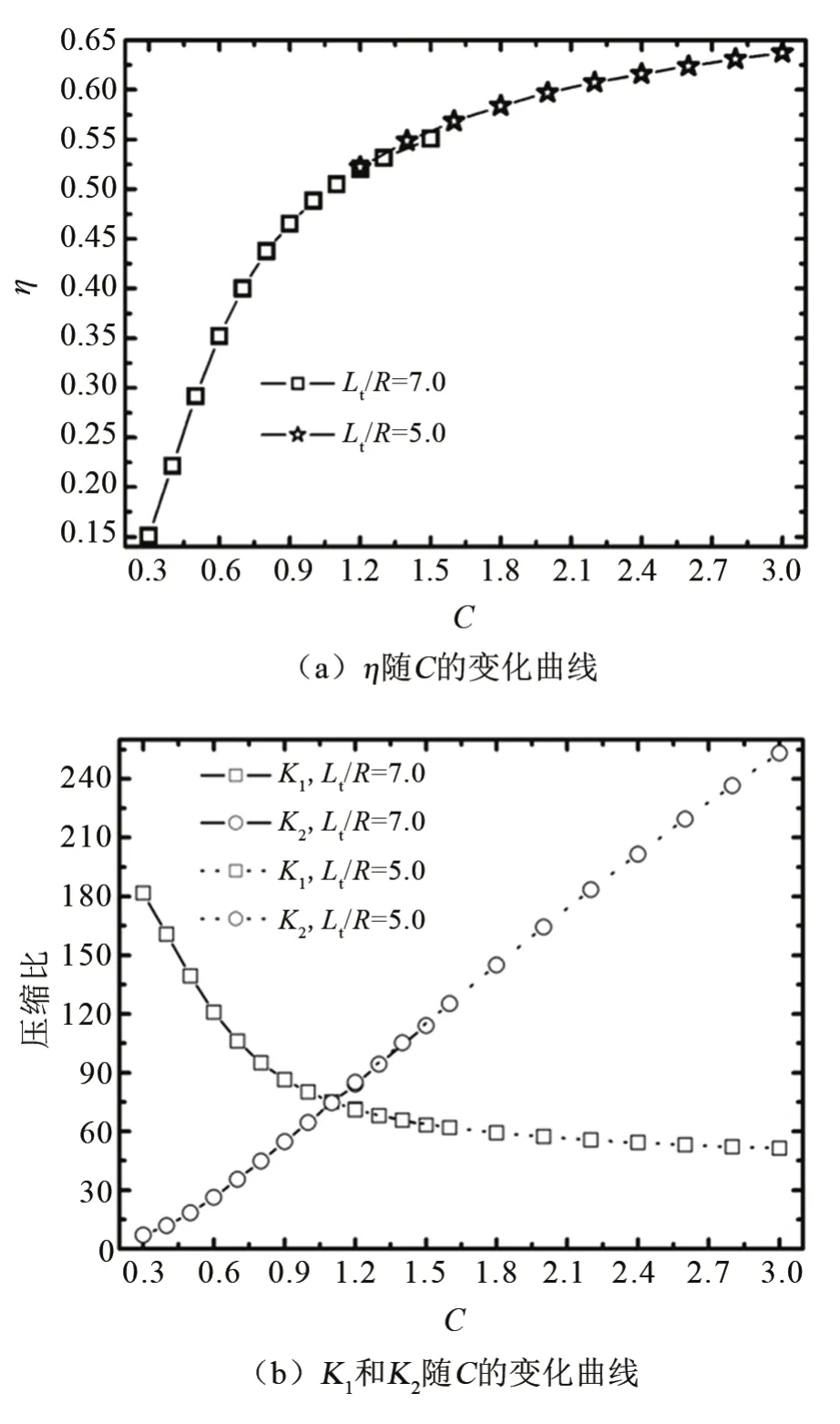
图8 气体收集效率η、K1和K2与涡轮叶片速度比C的关系Fig.8 The relationship between η、K1、K2and C
(5)涡轮叶列优化。图9为气体收集效率η与涡轮叶列级数的关系。装置的气体收集效率随叶列级数的增加趋于饱和。从图9(a)可以看出,当C=0.8,叶列级数大于或等于7级时,η不再增加,5级叶列的η值为7级时的94.7%;从图9(b)可以看出,当C=2.0,叶列级数大于或等于5级时,η不再增加,3级叶列的η值为5级时的95.9%。
对比图9(a)和(b),当C=2.0时,3级叶列的η为0.5725,当C=0.8时,5级叶列的η为0.4375,前者比后者高出了30.9%,但少用了二级叶列,因此,采用高的叶片速度比用少的叶列级数可以获得更高的气体收集效率。
(6)涡轮叶片倾角α的优化。表1为高转速下,不同的前后级叶列倾角对气体收集效率和多孔板增压比K1以及涡轮增压比K2的影响。可以看到,当前级涡轮叶片倾角α1为π/4,后级涡轮叶片倾角α2为π/8时,气体收集增压装置的综合性能最好。
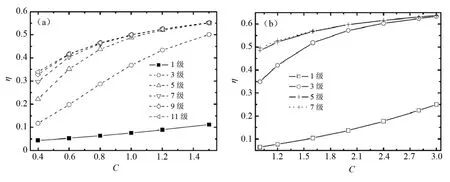
图9 不同的涡轮叶片速度比C下气体收集效率η与涡轮叶列级数的关系Fig.9 The relationship between gas collecting efficiency η and the blade stage number
表1 叶列倾角α与气体收集效率η及压缩比K1、K2的关系Tab.1 The relationship between blade slope angle and η,K1and K2
表2所列为气体收集增压装置设计参数。在此基础上,开展了吸气式电推进系统气体收集增压装置原理样机研制。
表2 气体收集增压装置设计参数Tab.2 design parameters of the gas gathering and compressing device
3.2 气体收集增压装置试验验证
将气体收集增压装置原理样机置于气体压力为10-2Pa的真空室内进行试验。如图1所示,试验开始时,开启气阀1和气阀2,关闭气阀3,开启涡轮分子泵,待系统稳定后,读取真空计1和真空计2的压力值,真空计2和真空计1读数的比值即为气体收集增压装置增压比。试验表明,气体收集增压装置的主动增压比为3 400倍,在轨工作时乘上多孔板的增压倍数80倍,气体收集增压装置的增压总倍数达到2.7×105倍以上,能够将空间气体压力自10-4Pa量级增至102Pa量级,满足电推力器正常工作的需要。
地面上难以得到7.8 km/s的中性气体束流,也难以模拟空间环境气体成分。因此,采用数值计算的方法验证多孔板的收集效率。数值计算表明,气体收集增压装置的气体收集效率为67.1%。
4 电推力器技术研究
4.1 电推力器技术方案研究
目前,兰州空间技术物理研究所研制的吸气式电推进系统采用了ECR型电推力器即电子回旋共振离子推力器。ECR推力器利用微波发生器引导微波进入带有永磁体的放电室,通过微波交变电场与电子在磁场中的回旋频率谐振,产生相位匹配的驱动力使电子不断加速,电子轰击使气体原子和分子电离产生的离子经栅极引出系统加速后引出形成推力,中和器中产生的等离子体则通过末端的小孔直接排出,以中和束流使束流保持电中性,同时防止空间电荷效应造成的束流发散以及由栅极下游的高电势造成的离子束流运动反转。从ECR推力器的工作原理可以看出,ECR推力器工质无须预热即可电离。这种电离放电模式比直流放电具有更高的电离效率和推力器效率,可以产生更高密度的等离子体,可以在更低的压力下放电并且能够明显改善小腔体内的放电性能。
N2、O2工质ECR电推力器产生的推力可以表示为:

式中:γdαm为发散角引起的推力损失系数和二价离子引起的推进剂利用效率损失系数;Ib为束流值;Vb为总加速电压;M为气体分子折合分子量。对于吸气式电推进系统,γdαm取0.96,电推力器推力取值要求在5~15 mN之间,相应的束流值为150~400 mA。考虑到束流密度的限制,电推力器直径为10 cm。
针对五种不同的磁场,进行了磁场优化设计。图10为磁环位置,图11为不同的磁环对应的磁场。(a)为第一种磁路结构,a=15 mm,b=15 mm;(b)为第二种磁路结构,a=20 mm,b=15 mm;(c)为第三种磁路结构,a=18 mm,b=20 mm;(d)为第四种磁路结构,a=15 mm,b=20 mm;(e)为第五种磁路结构,a=12 mm,b=23 mm。ECR共振区域的范围随着b值的增大而增大,(e)图中离子源的共振区域最大,有利于电推力器效率的提高。
图10 磁环位置示意图Fig.10 The positions of the magnetic rings
图11 不同磁路结构下的静磁场计算结果Fig.11 The calculation results of the static magnetic field with different magnet rings
4.2 电推力器地面试验验证
4.2.1 电推力器功率测量
ECR电推力器系统的总功率包括离子源功率和中和器功率。离子源功率包括离子源微波系统功率和栅极系统功率。其中离子源微波系统的功率由微波源直接读出。栅极系统功率包括屏栅和加速栅消耗的功率,由于加速栅截获电流较小,栅极系统功率按屏栅计算,将屏栅消耗的功率乘以修正系数1.05得到栅极系统总功率。屏栅功率由屏栅电压乘以离子束流得到。中和器功率包括微波系统功率和束流引出功率。其中,中和器微波系统的功率由微波源直接读出,束流引出功率等于引出电压乘以束流电流。图12为电推力器点火照片,表3所列为电推力器系统功率测量相关参数。计算得到的电推力器系统总功率为438 W。涡轮分子泵的气动功耗和摩擦功耗为200 W,涡旋泵的额定功耗为50 W,因此,吸气式电推进系统的总功耗为688 W。
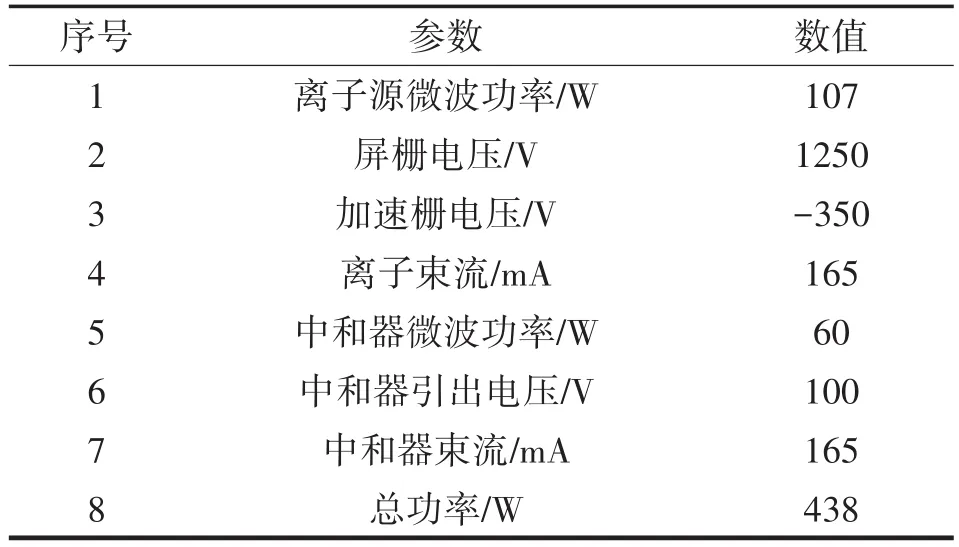
表3 电推力器功率测量相关参数Tab.3 Parameters related to the electric thruster power measurement
图12 推力器系统点火照片Fig.12 The photo of the electric thruster firing
4.2.2 推力测量
采用激光位移法测量电推力器产生的推力。图13所示为微小推力测量系统。推力器和位移之间的关系近似满足F=kx+b。推力器工作前,通过校准砝码得到一组力F和位移x的关系,算出式中的k和b。推力器工作时,利用激光干涉仪经由靶标反射镜和90°折射镜测量得到位移,代入式(1)推力表达式得到推力值。在438 W的工作条件下,k和b的值分别是0.770 4和-0.825,推力器工作产生的位移是8.23 μm,计算得到的推力值为5.5 mN。将电推力器质量流量0.215 mg/s代入η=T2/2m˙P中,计算得到电推力器的效率为15.8%。其中,η为电推力器效率,T为电推力器推力,m˙为电推力器质量流量,P为电推力器总功率。
5 吸气式电推进系统应用分析
将气体收集增压装置与电推力器集成,形成吸气式电推进系统。气体收集增压装置的稳压室通过气路与电推力器连接,电推力器气路带有高压,为避免高电位传导至气体收集增压装置,在连接气路上布置气体绝缘器。
航天器在空间飞行受到的阻力为F=1/2ρmv2cCdA,其中ρm为空间气体密度,vc是航天器相对于环境的运动速度,为7.8 km/s,Cd为阻尼系数,本研究取2,A是航天器正对运动方向的横截面积。在250 km高度的轨道上,大气密度约为1.32×10-10kg/m3,0.32 m2横截面积的航天器受到的阻力为5.2 mN左右。在200 km高度的轨道上,大气密度约为4.12×10-10kg/m3,0.32 m2横截面积的航天器受到的阻力为7.2 mN左右。在180 km高度的轨道上,大气密度约为7.38×10-10kg/m3,0.32 m2横截面积的航天器受到的阻力为12.5 mN左右。气体收集增压装置收集气体获得质量流量m˙可表示为m˙=ρmvcSη,S为多孔板横截面积,与航天器横截面积A相等,η为气体收集增压装置气体收集效率67.1%,在250 km的轨道高度上,气体收集增压装置获得的质量流量为0.223 mg/s,大于产生5.5 mN推力时电推力器需要的质量流量。因此,兰州空间技术物理研究所研制的吸气式电推进系统能够满足截面积为0.32 m2的航天器在250 km轨道上的推阻平衡需求。
6 总结与展望
本文主要介绍了兰州空间技术物理研究所吸气式电推进技术的最新研制进展,主要包括吸气式电推进系统方案、应用分析等。在理论分析和数值计算的基础上,开展了气体收集增压技术研究和N2、O2工质电推力器技术研究等,获得了气体收集增压装置和电推力器关键设计参数。利用研制的吸气式电推进系统原理样机开展了地面验证,主要包括电推力器功率、推力、效率和气体收集增压装置增压比等。结果表明,兰州空间技术物理研究所提出的吸气式电推进系统方案能够满足250 km高度左右特定航天器的阻尼补偿需求。
后续工作主要包括两方面:第一,提升吸气式电推力器系统性能。通过优化电推力器设计(如磁场设计、结构设计等)和引入超高比冲栅极系统方案,提高电推力器效率,从而提高吸气式电推进系统的推功比,满足更低轨道航天器阻尼补偿需求,丰富吸气式电推进系统的应用场景。第二,提高吸气式电推进系统的寿命和可靠性。通过采用电推力器异常放电抑制和敏感组件抗氧腐蚀等方法,提高吸气式电推进系统和可靠性,在此基础上开展吸气式电推进工程样机研制。
猜你喜欢
北京航空航天大学学报(2022年7期)2022-08-06
北京航空航天大学学报(2021年9期)2021-11-02
空间控制技术与应用(2021年1期)2021-04-25
军民两用技术与产品(2021年10期)2021-03-16
汽车维修与保养(2019年7期)2020-01-06
航天器工程(2019年1期)2019-03-06
北京航空航天大学学报(2017年5期)2017-11-23
祝您健康(2016年2期)2016-02-24
太空探索(2015年6期)2015-07-12
汽车维护与修理(2015年6期)2015-02-28
