
基于虚拟力的无人机群自组网连通性优化算法*
2022-02-12 12:04谢佑波朱竹青周红波
舰船电子工程 2022年1期
谢佑波 朱竹青 周红波
(海军指挥学院 南京 210006)
1 引言
随着科学技术的发展,在未来信息化、智能化战争中无人机群将被广泛用于执行各种作战任务。无人机群的组网控制能力影响着无人机群的作战效能发挥,因此开展无人机群自组网连通性问题研究十分重要。针对无人机群自组网连通性低的问题,提出一种基于改进虚拟力的无人机群自组网连通性优化算法,并进行仿真实验验证了该算法的可行性。
2 基于改进虚拟力的无人机群自组网连通性优化算法
在受到干扰时,无人机群各成员之间通信连通性下降,从而导致无人机群自组网能力下降。利用改进的虚拟力模型,结合虚拟力作用原理[1],改进虚拟力算法用于对无人机群自组网连通性进行优化。
2.1 虚拟力原理用于提高无人机自组网连通性的方法
首先,无人机确定与其有通信关系的相邻无人机,只有这些无人机对其有虚拟力的作用。设无人机Si(xi,yi)的相邻无人机Sj( )xj,yj集合表示为

其次,无人机逐个接收相邻无人机的通信信号,同时测出干信比。当无人机测出的干信比大于稳定通信时的干信比,即判断受到干扰。
再次,无人机逐个计算出与相邻无人机通信时的等效稳定通信距离,接着计算相邻无人机对其产生的虚拟力。
然后,无人机求出所受的虚拟力合力,并在虚拟力合力的作用下改变原先运动状态,进行移动。
最后,无人机测得与相邻无人机通信时的干信比等于稳定通信时的干信比,就保持原先的运动状态,进行移动。
2.2 局部极小值问题的解决
局部极小值问题是由虚拟力算法本身的设计引起的,基于改进虚拟力算法的无人机在运动中容易陷入局部极小值问题。战场环境复杂,无人机在执行任务时很难掌握全局的信息,也没有固定的目标点,难以构造特殊的势场函数来引导无人机解决局部极小值问题。这里基于逃离法解决局部极小值问题,使得无人机更好地完成运动调整,提高与相邻无人机通信链路的连通性[2~9]。
1)局部极小值判定。当无人机通过测出的干信比感知相邻无人机对其有虚拟力作用,如果发现虚拟力合力的方向与自己的速度方向相反或者虚拟力合力为零时,即可认为已经陷入局部极小值[10]。
2)设置虚拟目标点。当无人机判定陷入局部极小值后,在速度方向的周围产生一个虚拟目标点[11]。无人机在偏离力的作用下改变运动状态,直到摆脱局部极小值问题,虚拟目标点才消失。设置虚拟目标点后,无人机所受的虚拟力合力大小不会为0,方向也不会与速度的方向相反。
2.3 基于改进虚拟力的无人机群自组网连通性优化算法流程
在以上基础上,提出基于改进虚拟力的无人机群自组网连通性优化算法如图1所示。

图1 基于改进虚拟力的无人机群自组网连通性优化算法流程
3 仿真实现及分析
3.1 仿真环境设置
由于多无人机以相同速度和方向在战场上运动,无人机之间可以看作是一个相对静止的状态,即无人机的初始速度为0。仿真相关参数设置如表1所示。
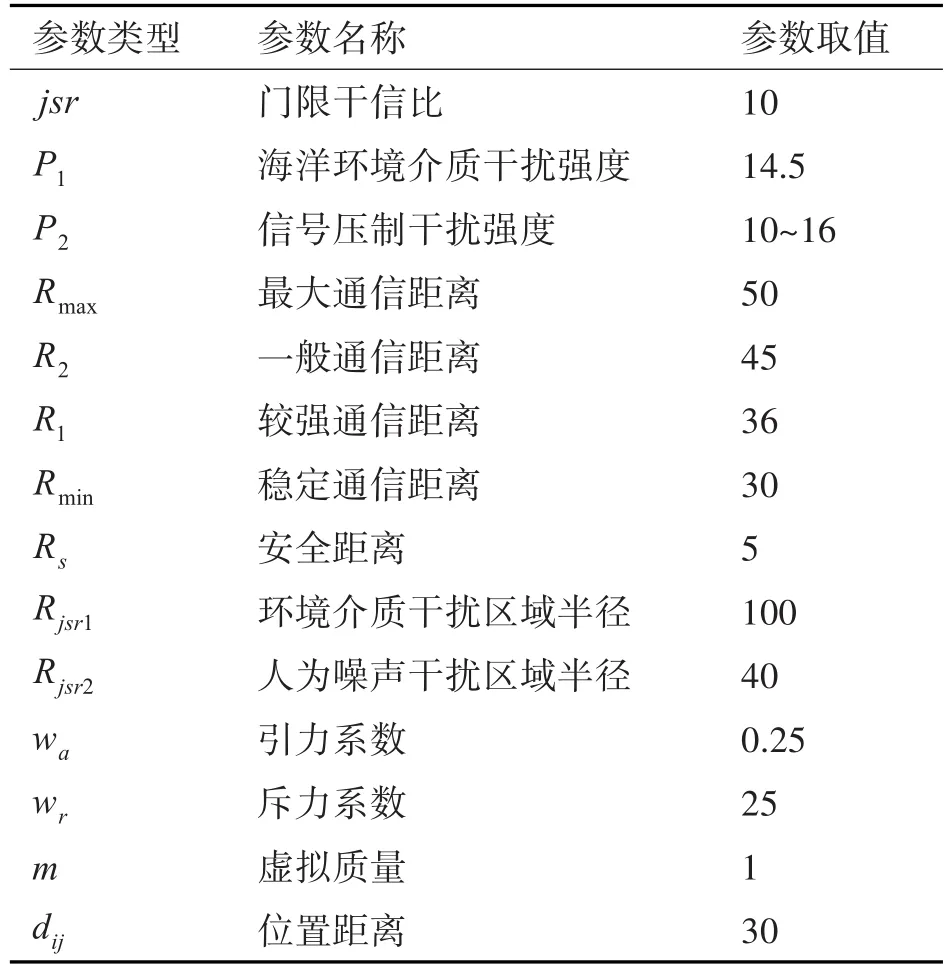
表1 仿真参数设置表
3.2 仿真实验及分析
1)海洋环境介质干扰下的仿真实验。
实验想定如图2(a)所示:实线小圆代表着无人机,虚线大圆代表着海洋环境介质干扰区域。五架无人机都在海洋环境介质干扰区域内,无人机群自组网中所有的通信链路都受到干扰。仿真结果如图2所示。
图2表明在海洋环境介质干扰区域里,随着优化算法迭代轮数的增加,五架无人机都在不断地靠拢。这是由于海洋环境介质影响着网络中的每个无人机,使得它们各自的等效稳定通信距离变短。因此,五架无人机就在虚拟力和吸引力的作用下不断靠拢,当各自达到等效稳定通信距离,建立起稳定的通信链路,就不会改变运动状态。
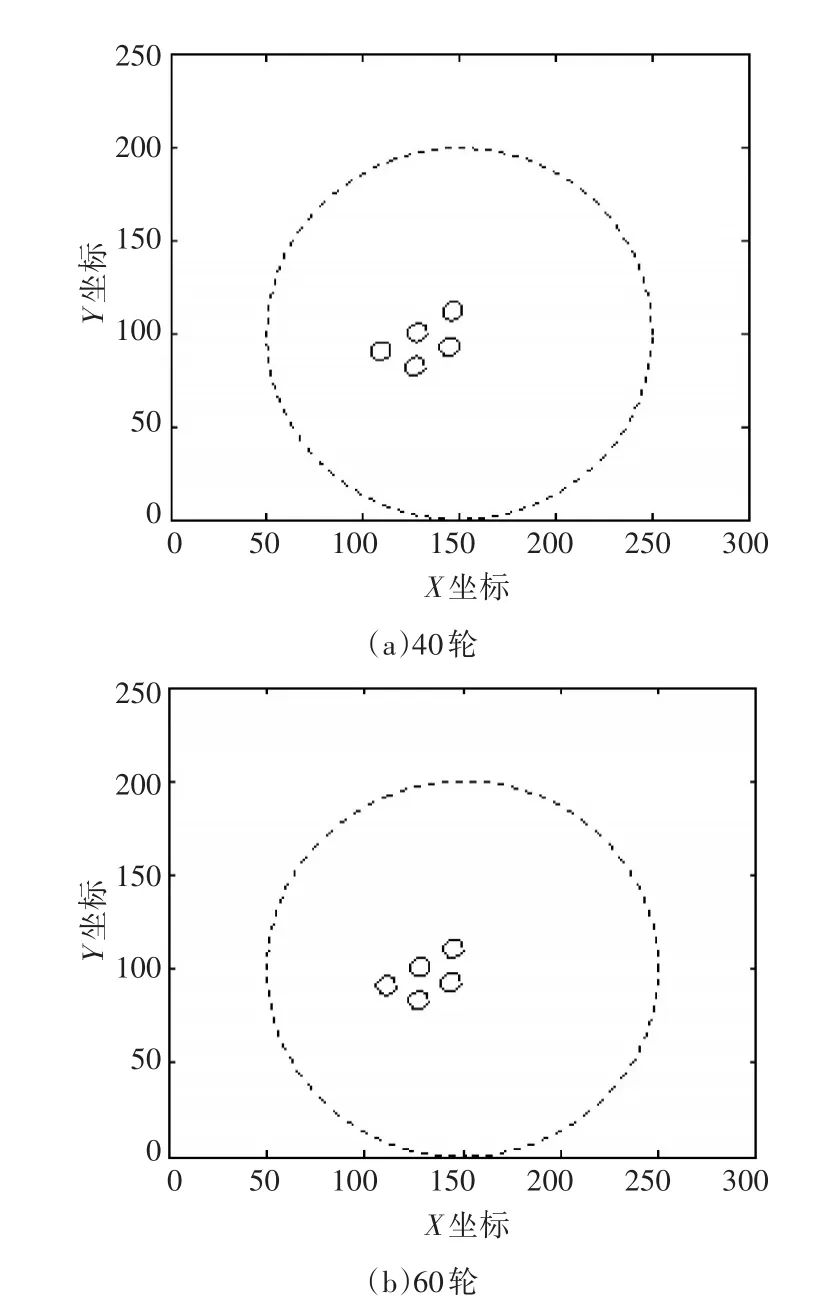
图2 海洋环境介质干扰下无人机运动的变化
图3(a)表明随着优化算法迭代轮数的增加,五架无人机都在不断进行靠拢运动。但是在运动过程中,无人机之间的相对位置关系没发生很大变化。因此,整个优化过程中无人机群自组网的拓扑结构始终保持相对的稳定。图3(b)表明随着优化算法迭代轮数的增加,网络连通率在不断的提高。在轮数0到轮数10之间网络连通率提高的很快,这是由于一开始无人机之间的距离远大于各自的等效稳定通信距离,相互作用的虚拟力比较大,运动状态的改变比较快,网络连通率也就增加的快。到后来虚拟力逐渐减小,运动状态的改变的慢,网络连通率的增加趋于平缓。
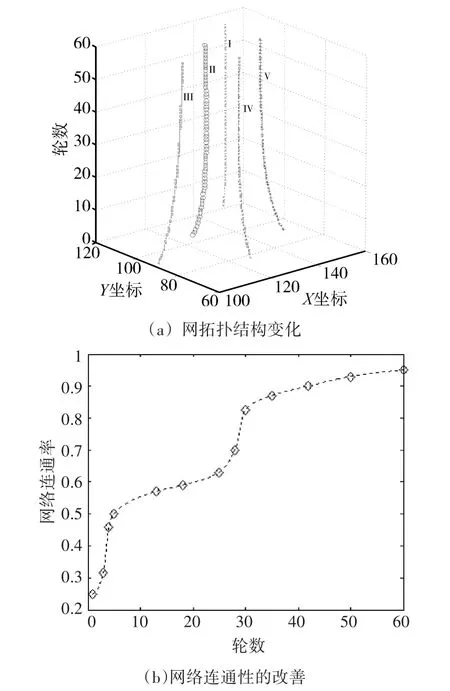
图3 海洋环境介质干扰下网络特征变化
2)信号压制干扰下的仿真实验
实验想定如图4(a)所示:实线小圆代表着无人机,虚线大圆代表着信号压制干扰区域。无人机群自组网中的两架无人机在信号压制干扰区域内。仿真结果如图4所示。
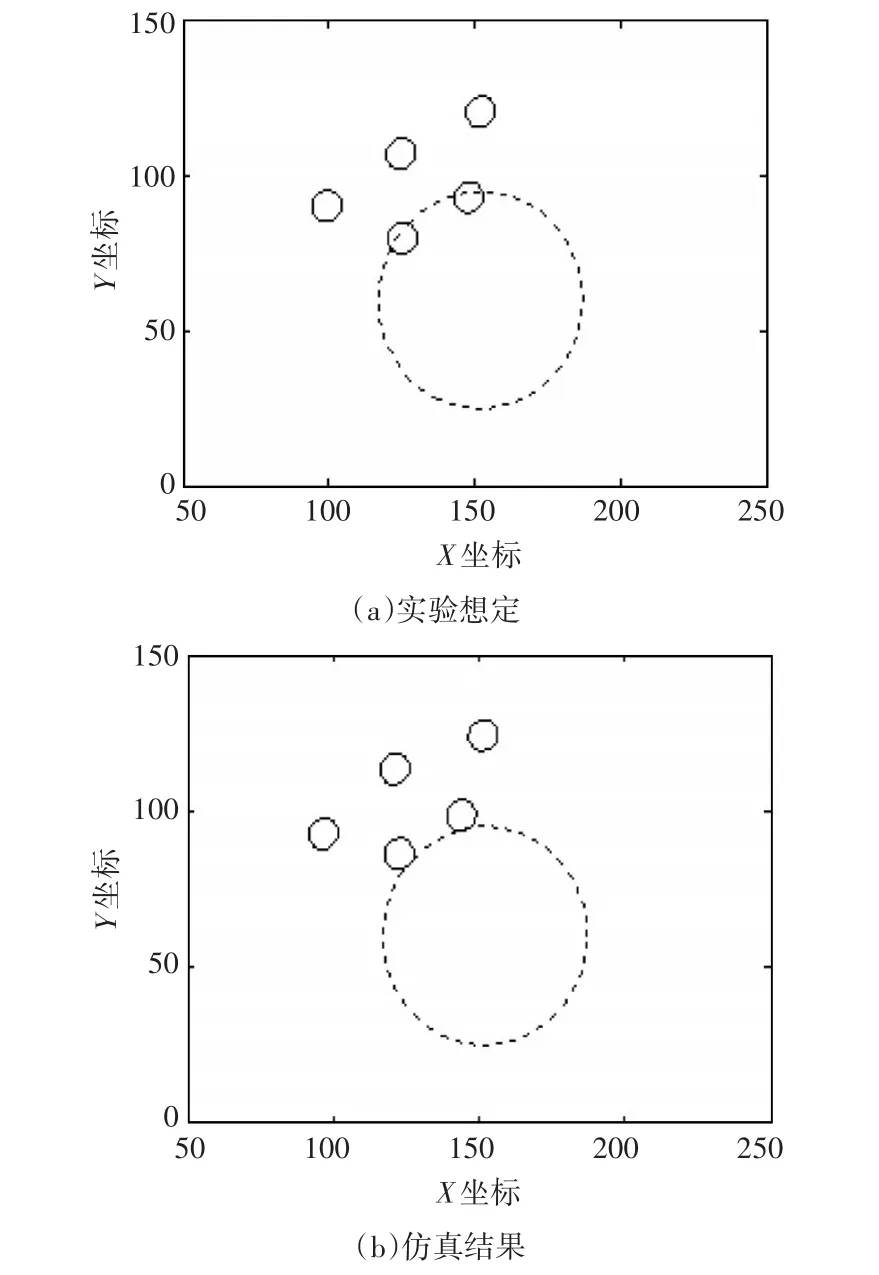
图4 信号压制干扰下无人机运动的变化
如图4所示,随着优化算法迭代轮数的增加,受干扰的两架无人机不断地远离干扰区域,而相邻无人机也不断远离干扰区域。干扰区域内的无人机在吸引力的作用下靠近相邻无人机,在靠近过程中,由于相邻无人机的等效通信距离没变,干扰区域内的无人机又对它们产生斥力的作用,相邻无人机也往远离干扰的地方移动。最终两架受干扰的无人机都脱离信号压制干扰区域。
图5(a)表明,随着优化算法迭代轮数的增加,五架无人机都在不断的进行运动调整,但在整个运动过程中无人机之间的相对位置关系没发生大的变化。因此,无人机群自组网的拓扑结构始终保持相对的稳定。图5(b)表明,随着优化算法迭代轮数的增加,网络连通率不断的提高。然而在轮数30到轮数60之间时,网络连通率提高的速度放缓。这是由于引力的作用效果和斥力的作用效果不均衡导致的。在轮数0到轮数20之间,主要是被干扰的无人机在引力作用下靠近相邻无人机,网络连通率提高的比较快。在轮数30到轮数60之间,主要是相邻的无人机在斥力的作用下远离被干扰的无人机,因此,网络连通率提高的比较缓慢。
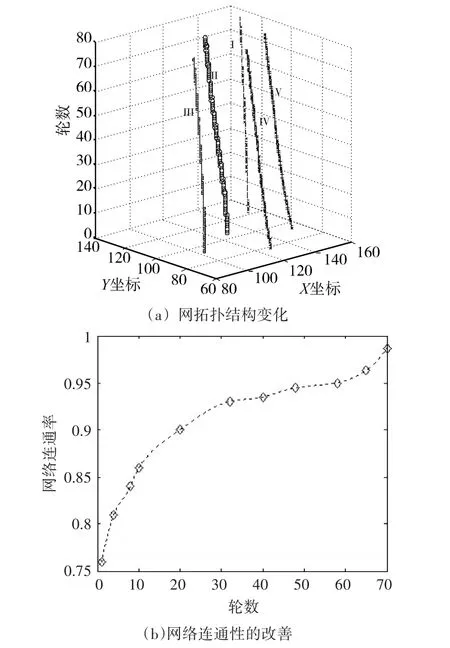
图5 信号压制干扰下网络特性变化
仿真实验结果表明,本算法能够显著提高无人机群自组网的连通性。基于同一种优化算法的无人机在遭遇不同干扰时的反应不同,主要由于海洋环境介质干扰对通信链路连通性的影响是双向的,无人机双方都会受到引力作用。而信号压制干扰对通信链路连通性的影响是单向的,只有一方受到引力作用。通常情况下,敌方信号压制干扰强度大,干扰范围小,只要网络中有无人机没受到干扰,基于优化算法的无人机都可以脱离干扰区,从而保证无人机群自组网的连通性;而海洋环境介质干扰强度低,但是干扰范围比较大[12],无人机可通过运动调整来获得良好的通信链路,从而保证无人机群自组网的连通性。
4 结语
针对无人机群自组网连通性低的问题,提出一种基于改进虚拟力的无人机群自组网连通性优化算法。利用等效稳定通信距离作为虚拟力参量,通过设置虚拟目标点解决局部极小值问题,使得无人机能根据海战场环境的变化进行快速的运动调整,提高与相邻无人机通信链路的连通性,同时保证网络拓扑结构的稳定性。仿真结果证明提出的优化算法能够提高无人机群自组网的连通性。
猜你喜欢
火力与指挥控制(2022年8期)2022-09-16
农业工程学报(2022年12期)2022-09-09
流行色(2022年7期)2022-08-31
计算机系统应用(2022年8期)2022-08-25
现代仪器与医疗(2022年3期)2022-08-12
社会科学战线(2022年3期)2022-06-15
科技创新导报(2016年27期)2017-03-14
山东工业技术(2017年1期)2017-01-24
科技创新与应用(2016年34期)2016-12-23
中学生数理化·高二版(2008年4期)2008-11-12
