基于模糊逻辑的下肢髋关节外骨骼步态划分方法
2022-02-09 07:27:00谭明航吴钦木
智能计算机与应用 2022年12期
谭明航,吴钦木
(贵州大学 电气工程学院,贵阳 550025)
0 引言
近年来,生活节奏在不断加快,使得脑卒中、类风湿性关节炎及交通事故等造成下肢运动功能障碍的人群也在增多。随着科学技术的发展,下肢外骨骼机器人的出现帮助患者进行康复训练,克服了传统人工康复训练效率低、康复慢的缺点,为下肢运动功能障碍人群带来了福音[1]。
下肢外骨骼机器人主要是通过步态划分结果,确定关节电机输出力矩的时刻点,从而起到辅助人体下肢运动的作用,因此如何设计下肢外骨骼机器人的步态划分方法直接关系到康复训练的效果[2]。国内外众多学者和科研人员提出了不同的步态划分方法。拟做阐释分述如下。
(1)IMU 检测角度或加速度信息。Jang 等人[3]建立了外骨骼髋关节和膝关节在不同运动过程中的角度与加速度信息关系,并以角度曲线的特定峰值来进行步态划分。
(2)FSR 检测足底压力信息。为了提高步态划分的准确性,Hyun 等人[4]构建了以足底压力变化量来划分步态相位的方法,并利用足底压力的特点通过阈值来确定步态所处的阶段。Kim 等人[5]、Qi 等人[6]设计了一种基于足底压力和下肢角速度的步态划分器,该步态划分器通过角速度调整人体与外骨骼的阈值参数。
(3)无线超声波检测足部位移。Fan 等人[7]利用无线超声波传感器,通过建立递归牛顿-高斯方法来定位步态阶段。上述利用传感器数据进行步态划分的方法在行走的过程中能发挥一定作用,但其鲁棒性差,容易受外界因素干扰,导致步态划分效果不佳。
综上所述,基于传感器的步态划分方法具有一定的优势,并不需要建立精准的下肢外骨骼机器人动力学模型[8-9],不依赖EMG 生物肌电信号[10],以传感器的特征来标定步态阶段。然而单一的传感器信息可能无法准确地划分步态,因此本文为了提高步态划分的精准性与鲁棒性,设计了一种基于模糊逻辑的下肢髋关节外骨骼步态相位划分方法,该方法实现了行走过程中每个步态相位估计的准确性,提高了人机协调性。
1 基于模糊逻辑的下肢髋关节外骨骼步态划分原理
本文所提出的基于模糊逻辑的下肢髋关节外骨骼步态划分方法的架构如图1 所示。主要分为感知层、决策与控制层和执行层三个部分。其中,感知层有一阶低通滤波器、步态相位划分器,决策与控制层包括自适应振荡器及力矩发生器。

图1 基于模糊逻辑的下肢髋关节外骨骼步态划分步态相位划分方法架构图Fig. 1 Gait phase division method structure diagram of lower limb hip joint exoskeleton gait classification based on fuzzy logic
1.1 一阶低通滤波器
相较于其它低通滤波算法,一阶低通滤波算法待调节的参数少,运算量小,易于软件实现和快速处理,是实时性强的滤波算法。因此采用该滤波器对髋关节角度数据和足底压力数据进行滤波预处理,滤波器输出为:

其中,Y(n) 为本次滤波结果;a为滤波系数;X(n) 为采样值;Y(n -1) 为上次滤波结果。
1.2 步态周期划分器
人体行走过程是一种类周期性运动,每条腿的动作总是表现为向前迈出与收回,循环往复,可以通过传感器检测行走过程中重复特征事件信息的方法,达到区分每个步态周期的目的。例如IMU 检测角度或加速度、压力感应电阻(Force sensing resister,FSR)检测足底压力等。由于人体下肢摆动存在抖动,导致髋关节角度曲线可能存在多个局部峰谷,单独使用IMU来划分每个步态周期,其准确度会受到影响。考虑到人体步行过程中,足部活动主要为脚跟撞击、脚趾支撑、脚趾离地以及足部完全悬空四个部分[8],脚跟和脚趾部位的压力大小会随着行走步态阶段的发展而呈现明显的规律性变化,因此,本文结合髋关节角度曲线局部峰谷与足底压力二者的特点,设计了一种模糊逻辑规则来进行每个步态周期的实时在线划分。
本文选择采样频率为1 000 Hz 的IMU 来进行髋关节角度数据采集,定义采集到的髋关节角度和髋关节角速度分别为q和,经一阶低通滤波后的髋关节角度为qfilter。
将滤波预处理后的髋关节角度qfilter进行归一化处理,需用到的公式为:

其中,qfilter,min、qfilter,max分别为滤波预处理后的髋关节角度最小值和最大值,qw为经归一化处理后的髋关节角度。
取滑动窗口序列:

其中,n为奇数,且满足n∈ (0,100) 。
则髋关节角度曲线局部峰谷情况可由下列公式判定:

其中,VL为波谷;PK为波峰;ZE为过零点;min表示求最小值函数;max 表示求最大值函数;ε为一个正的极小值。
本文选择采样频率为100 Hz 的扁平式压力传感器来测量足底压力情况,并将传感器分别嵌入到鞋子的脚掌和脚跟两个部位,如图2 所示。图2 中,a为脚掌压力传感器,b为脚跟压力传感器,c为CAN数据传输线。

图2 足底压力传感器分布图Fig. 2 The profile of the plantar pressure sensors
为了更好地描述足底压力变化,将采集到的实时足底压力数据进行归一化处理,具体公式如下:

其中,i =1,2 表示脚掌和脚跟;Ps,i为足底压力传感器实时测得的压力值;Psmin,i、Psmax,i分别为足底压力传感器测得的压力最小值和最大值;Pi为经归一化处理后的足底压力。
依据式(3)、式(4),以髋关节角速度、qw为经归一化处理后的髋关节角度和足底压力差作为输入变量,经过研究定制的步态相位推理规则(GPIR),输出步态划分结果。
在式(3)、式(4)的基础上,本文构建了模糊逻辑推理系统(FIS),如图3 所示。对于髋关节角度输入变量,定义了3 个隶属函数:LOW-低、MID-中、HIGH -高,对于足底压力输入变量,定义了5 个隶属函数:L -小、M -中等、PH -较高、H -高、VH -极高,对于步态周期划分输出变量:IW -初始摆动相,FW-完全摆动相,IS-初始支撑相,FS-完全支撑相,得到的模糊逻辑规则,见表1。

图3 步态周期划分模糊逻辑推理系统Fig. 3 Fuzzy logic deduction diagram of gait stages division

表1 模糊逻辑规则表Tab.1 Fuzzy logic rules table
2 外骨骼机器人样机平台
本文的下肢髋关节外骨骼机器人样机平台如图4 所示。外骨骼样机控制系统基于ARM Cortex-M7架构芯片STM32F765IIK6。髋关节电机选用额定输出扭矩为45 N·m 的BLDC 直流无刷电机,电机FOC 驱动器额定功率为480 W,采用增量式编码器来获得关节电机转子机械角度。IMU 为维特智能公司生产的九轴陀螺仪,型号为JY931。

图4 下肢髋关节外骨骼机器人样机Fig. 4 Lower limb hip joint exoskeleton robot prototype
外骨骼样机系统开启电源后,所有传感器(髋关节IMU 传感器、足底压力传感器)数据、步态周期划分数据等都会记录在16 GB 容量的TF 卡中,以便于后续实验验证与数据分析对比。
3 实验验证及结果分析
3.1 实验设计
招募受试者一名(年龄22 岁、身高175 cm、体重72 kg),受试者穿戴外骨骼机器人样机在跑步机上以预先设定好的速度规则进行行走,共收集了来自该名受试者的10 组行走数据。表2 是收集到的不同速度阶段的10 组实验样本数据集。
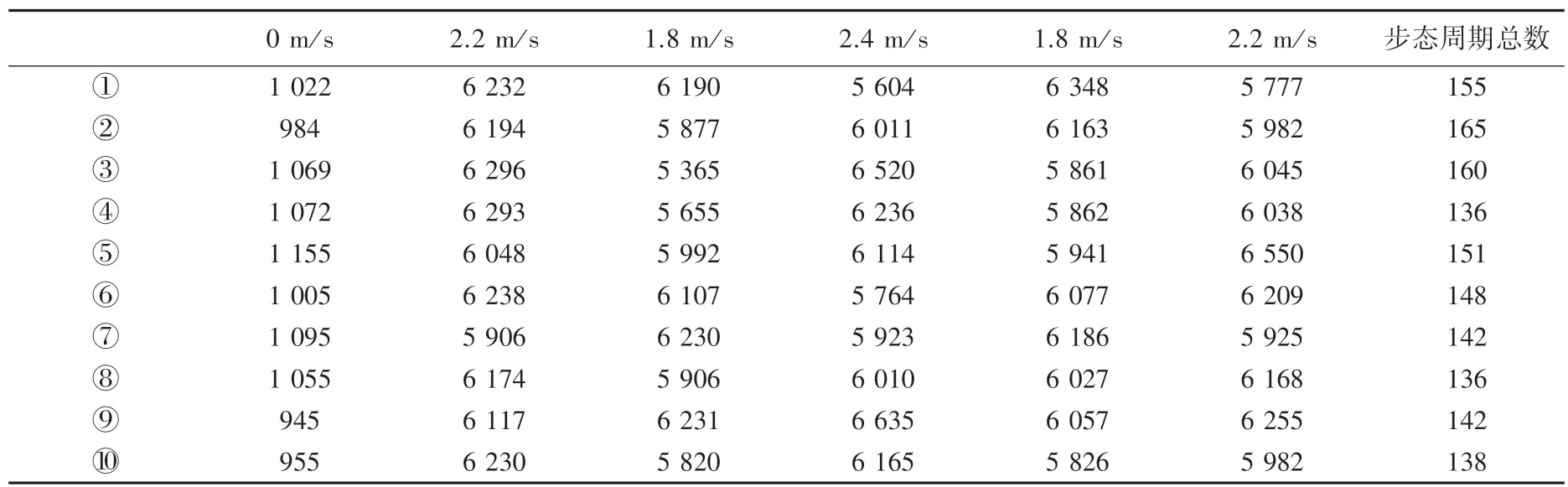
表2 各组样本不同速度阶段数据采样点数及步态周期总数Tab.2 Data points and gait cycles number of different speed stages in each groups of samples
3.2 相位划分器实验结果分析
前文1.2 节中相位划分器部分提出了依据髋关节角度局部峰谷情况和经过阈值条件判定后的足底压力情况的模糊推演逻辑规则,本文将该方法简称为GPF 方法。
GPF 步态划分方法将一个步态周期分成了4 个阶段,如图5 所示。图5 中,“阶梯状”的线代表了GPF 划分的步态阶段,当“阶梯状”的线值纵坐标为1 时表示当前步态阶段处于初始摇摆相、为2 时表示处于完全摇摆相、为3 时表示处于初始支撑相、为4 时表示处于完全支撑相。

图5 GPF 方法步态阶段划分情况图Fig. 5 GPF method gait stages division situation diagram
为了验证GPF 方法对步态相位划分的准确度,首先,定义每组测试样本各周期内的相位阶段划分正确率ERO作为步态相位阶段划分准确度评价标准一,数学定义公式见下式:

其中,Ω为实验一各组样本每个步态周期内相位阶段划分正确的采样点数,U为实验一各组样本每个步态周期内采样总点数。
其次,定义实验一M组样本的平均相位阶段划分正确率AERO作为评价标准二,数学定义公式见下式:

其中,由于实验一进行了10 组测试,因此M =10;i表示测试样本组别号;j表示各组测试样本步态周期序号;V表示各组测试样本步态周期总数。
步态阶段划分ERO结果见表3,各组样本步态阶段划分ERO误差棒如图6 所示。

图6 各组样本步态阶段划分ERO 误差棒Fig. 6 ERO error bars for gait stages division of each group of samples

表3 步态阶段划分ERO 结果Tab.3 Results of gait stages division ERO %
根据表3 和图6 中数据分析可知,第③组样本最小ERO为99.01%,最大ERO为100%,平均ERO为99.51%,该组测试结果在全部10 组测试中的步态划分准确率最高,除了第⑩组样本,其他组样本ERO均在95%以上,平均ERO在97%以上。第⑩组样本出现了最低ERO(94.10%)的原因是由于该组实验数据某阶段步态周期内受试者不小心阻碍了外骨骼动作,导致该步态幅度过小,角度峰谷与足底压力情况在支撑相阶段不明显,影响了GPF 方法对该步态周期内支撑相阶段的划分,然而在实际穿戴外骨骼进行助力行走的过程中,不会发生多段该种步态情况,除非外骨骼穿戴者人为刻意阻碍外骨骼动作。纵观全部10 组样本数据,从整体步态阶段划分效果来看,AERO结果为98.38%,AERO越高,GPF 对步态划分的效果越好。因此,本文提出的GPF 方法在步态阶段识别上具有较高的准确性,并且GPF 方法复杂度不高,相比其它神经网络方法更利于嵌入式微控制器程序的实现。
4 结束语
针对下肢运动功能障碍人群的康复训练,本文提出了一种基于模糊逻辑的下肢髋关节外骨骼步态相位划分方法。根据髋关节角度与足底压力数据相结合的模糊逻辑推演来精准划分每个步态周期,并记录每个步态周期初始摆动相时刻。为了证明所提出的基于模糊逻辑的下肢髋关节外骨骼步态相位划分方法的有效性及优越性,设计了跑步机行走实验,并进行了步态阶段划分准确度分析,实验结果表明基于模糊逻辑的下肢髋关节外骨骼步态相位划分方法具有准确的步态阶段划分能力以及更好的步态自适应协调性能。
猜你喜欢
科学大众(2024年5期)2024-03-06 09:40:34
军事文摘(2024年6期)2024-02-29 09:59:38
临床骨科杂志(2022年5期)2022-11-05 09:27:54
小哥白尼(野生动物)(2021年12期)2021-03-29 01:15:34
冰雪运动(2020年4期)2021-01-14 00:56:02
高师理科学刊(2020年2期)2020-11-26 06:01:16
电子制作(2018年18期)2018-11-14 01:48:04
自动化学报(2018年6期)2018-07-23 02:55:42
中华骨与关节外科杂志(2017年1期)2017-05-17 06:11:27
发明与创新(2015年37期)2015-02-27 10:40:27