计算机视觉技术在火情定位及检测系统中的应用
2022-02-08 08:55于洋
电子测试 2022年22期
于洋
(抚顺市第一中等职业技术专业学校,辽宁抚顺,113001)
1 视觉测量基本原理
视觉探测系统的工作就是利用二维影像来感知周围的三维信息,通过对相机的影像进行分析,从而得到立体目标的位置、形状等几何信息,从而在一定程度上对周围物体进行识别。影像中各点的亮度反映出空间目标表面的反射光线的强弱,而这一点在影像中的位置与空间目标的相对点的位置相关。根据光照形式和几何构造的关系,可将其划分为有源视觉探测和无源视觉探测。该测试系统的光源是基于实际测试需求的LED面光源。也就是说,在测量过程中,CCD摄像机的运动(由接近开关来完成),然后以特定的速率进行拍摄,然后由数据线路输入电脑进行图像处理、分析、测量,最后得到大梁中孔的几何参数。当CCD摄像机到达终点位置时,再次向后移动以确保精度[1]。
1.1 硬件组成
该系统使用了图像拼接技术,以提高检测的准确性和速度;并可用于大型纵梁的在线监测。因此,一方面,要保证前、后两个图像之间存在一定的交叠,从而降低计算工作量,加快拼接的速度。同时,为达到对纵梁零件进行实时、自动的检测,必须获取连续的检测图像。该系统的主要功能是通过输入设备(光学子系统)、 CCD、图像采集卡,并由主机控制存入存储装置,经计算机软件处理系统分析、处理后,向输出装置输出相应的信息[2]。
1.2 照明光源
在计算机视觉中,光源是一个非常关键的因素,它直接关系到输入的质量和使用效率的30%,适当的光照可以突出被测量部件的反差,克服现场的不确定性,提供高质量、高清晰度的图像;使用不当,会造成很多问题,比如花点、过度暴露等,会掩盖很多重要的信息,而影子则会造成边缘的错误检测,信噪比下降,不均匀会给图像的阈值选取带来一定的难度。由于目前已有的照明系统都不能满足不同的工作方式,所以要在有限的环境下实现最大的稳定性,就必须从目前的照明系统中选取合适的照明光源,以满足不同的使用要求。很多工业机械视觉探测系统都以可见光为光源,其原因在于它易于获取、成本低廉、使用方便。然而,这种光源最大的缺陷之一就是它的光能量无法维持。针对汽车组装工艺孔径的在线监测,由于光源长期处于持续发光状态,其使用寿命要求高,发光稳定,功耗低,所以需要选用LED(LightEmitting Diode)。
1.3 图像采集卡
图像采集是机器视觉的最前端,它的工作是由计算机获取图像的硬件。成像系统的解析度取决于摄像装置的解析度。所以,在机器视觉中,如何选用合适的图像采集装置是至关重要的。图像采集卡的功能是将图像信号进行取样,并将其量化成数字信号,再将数字信号送入帧或电脑内存中进行处理。图像采集卡是自动驾驶汽车视觉系统中的一项关键技术。其主要功能模块如下:
(1)一种用于对图像信号进行放大和数字化的图像信号的A/D变换模块。有一种采集卡,可以是彩色的,也可以是黑白的,可以是合成的,也可以是RGB的。同时,不同的数据采集卡具有8比特和10比特的数据采集精度。
(2)相机的输入和输出接口,它的作用是协调相机的同步,或者是实现异步复位、定时拍摄等。
(3)总线接口,用于通过Pc机上的总线进行高速的数字数据输出,通常采用 PCI接口,其传送速度可达到130Mbps,能够满足高分辨率的实时图像传送,并且所需CPU的时间也更短。有些图像采集卡还具有显示功能,能够实现高品质的实时显示,通信接口则是对通信进行控制[2]。
该测试系统采用维视数码影像科技有限公司的工业影像采集卡,是一款成熟、稳定、高精度、高分辨率的彩色(黑白)工业影像采集卡。该系统图像清晰度高,图像流畅,运动图像的软件处理,图像的动态获取性能良好。采用多块MY-200多块MY-200实现多通道、多窗口、多通道、多窗口同时实时显示,不需要分时完成。
2 技术分析
2.1 基础红外理论
2.1.1 普朗克辐射定律
我们从普朗克辐射定律得知,自然界的一切物体都能制造并吸收红外线。从普朗克方程出发,导出了绝对黑体辐射的射度 M、波长λ和黑体温度T之间的关系:

其中,C1(第一辐射常数)为3.7418×10-16(W·m2),C2(第2辐射常数)为1.4388×10-2(m.K)。这一定律为黑体辐射学说提供了依据。
2.1.2 斯特凡—玻尔兹曼定律
该定律说明的是黑体对半球空间中λ1-λ2波段内单位面积的辐射总功率M(单位为w.cm2),为:

2.1.3 维恩位移定律
通过对式(1)的微分,可以通过极大值推导出该定律:
上式中的a(近似值0.289em.K)是和温度不相关的常数,.m为光谱辐射出射度峰值状态下对应的波长。
2.2 OpenCV
为了达到类似于人的视觉功能,计算机需要通过二维图像获取三维环境中的信息。OpenCV则是由Inter公司研发的一个开放源码电脑视觉库,它包括了更多的计算机视觉与影像处理的一般算法。通过调用算法库中的透明界面,可以完成对图像的处理和计算机视觉的要求。本论文的火源定位和探测系统就是以此为基础进行的[3]。
2.3 火灾图像预处理技术
中值滤波,该方法可以有效地消除由于线性滤波造成的图像细节不清,同时也可以对噪声进行有效的过滤。
灰度化,从彩色影像到灰色影像的转换,已被广泛应用于影像辨识、医疗等方面。
二值化,将256个亮度级别的灰度图像按照设置门限转换成二值化的,它可以有效地反映出整个图像和局部的相关特性,使目标轮廓突出,降低了数据处理的工作量。
直方图均衡化,利用一定的映射关系,改变原图的像素灰度,使得最后的灰度概率密度呈现出均匀地分布,从而改善了图像的反差和灰度动态范围。
轮廓跟踪,该方法通过在图像中按特定的次序寻找物体的边界,从而得到物体的轮廓信息。
3 系统结构和硬件设计
本文介绍了一种利用图像处理技术实现火源位置和探测的方法。该系统采用双眼摄像机连接于监测服务器,并安装了红外过滤器,通过软件实现对监测范围的实时监测。一旦发生火灾,当地的监测服务器会启动现场语音模块,并利用串口将报警信息发送给GSM系统,并以手机短信通知管理员。同时,通过本地监控服务器对火灾发生的地点进行定位、追踪,并向移动控制系统传送位置,从而实现对火灾的有效控制。该系统采用因特网连接的方式,实现了对现场视频、图像等的实时采集。
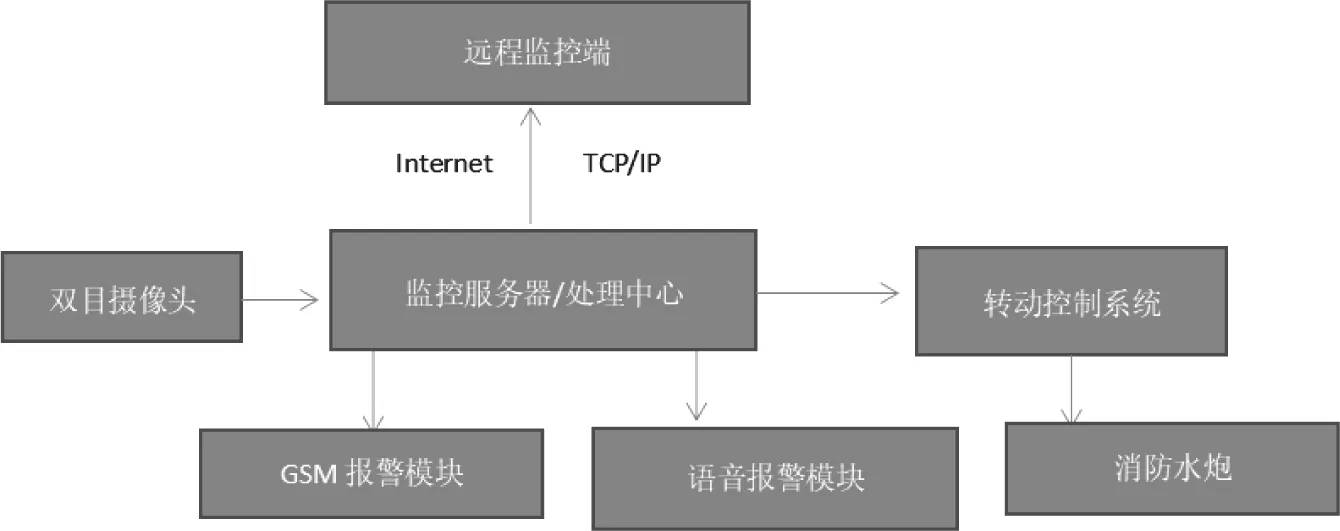
图1 系统结构示意图
该系统的组成和功能实现采用了双目摄像头,红外滤光器, PC机, GSM报警模块,结构比较简单。本系统采用了带有红外滤镜的双眼CCD相机,能够很好地为火情采集提供良好的视觉辅助;所采用的GSM模组为TC35,西门子开发,其数据话音传送能力强,且可靠性高[4]。
4 火灾图像处理
4.1 特征提取
早期的火源主要有 :阴燃(600~10000K)、火羽流(500~1700K)、烟气(300~800K)等。如图 2 所示。
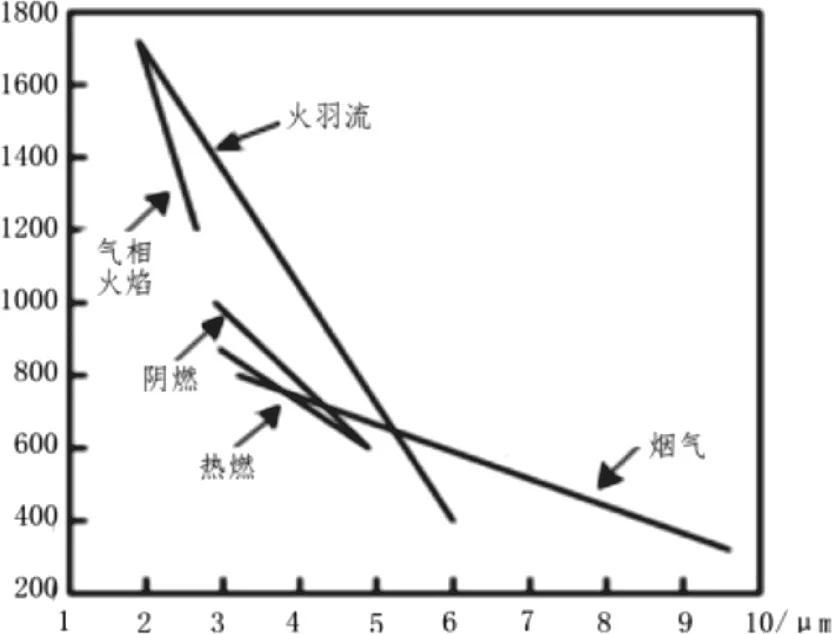
图2 早期火灾热物理现象温度和峰值波长范围
由图表可以看出,火灾的高温特征是最有价值的判别基础。利用这一特点,可以从背景辐射中分离出它,从而达到对火灾的探测。
4.2 红外测温模型
将红外基本原理与火焰的温度特征相结合,利用红外成像技术对火灾进行识别。红外图像一般都是用来描述物体和物体发出的热辐射,所以相应的模型是通过对红外图像上的像素点进行测量,然后利用软件运算来求出真实的温度。红外温度测量模型的基本思想是:从图像中提取的温度不是实际的像素值,而是随着距离的增加逐渐减小。所以,要利用距离与像素的对应关系来进行校正,才能得到真正的像素。然后根据温度与像素的关系,得出最终的温度[5]。三者之间的关系如下式所示:
其中,T、P、d分别代表温度值、像素值及距离值。
5 系统算法
5.1 红外测温算法
利用红外测温技术可以探测到早期没有明显的火焰现象,在这种情况下,最重要的信息就是在火灾中发生的热物理现象。基于红外温度测量的数学模型,给出了相应的计算流程。
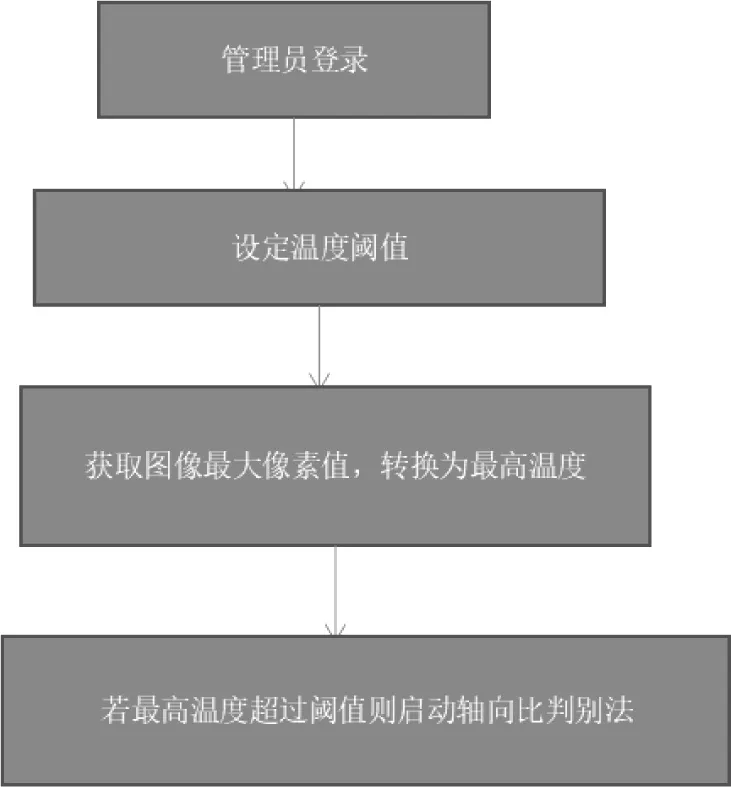
图3 红外测温算法相关流程图
对应的部分源代码如下:
cvSmooth(image l,image1,CV_MEDIAN,3,0,0,0);
cvCvtColor(image1, gray, CV_ RGB2GRAY);
cvSmooth(image2,image2,CV_ _MEDIAN,3,0,0,0);
cvCvtColor(image2, gray1,CV_ RGB2GRAY);
cvMinMaxLoc(gray, & MinValue, &MaxValue),&MinLocation, & MaxLocation);
average=cvAvg(gray);
s1.Format(%f”, MinValue);
s2.Format(“%f”, MaxValue);
s3.Format(«%f”, average.val[0]) ;
s4.Format(“%of””,T)// 温度阈值
m_ Edit18.SetSel(0,-1);
m_ Editl8.ReplaceSel(s4); .
SetDlgItemText(IDC_ EDIT18,s5);
cvGetMat(gray, gray_ mat,0,0);
cvGetImage(color_ _img, IDC_ STATIC_ PIC);
DrawPicToHDC(color_ _img, IDC_ STATIC_ _PIC);//显示图像
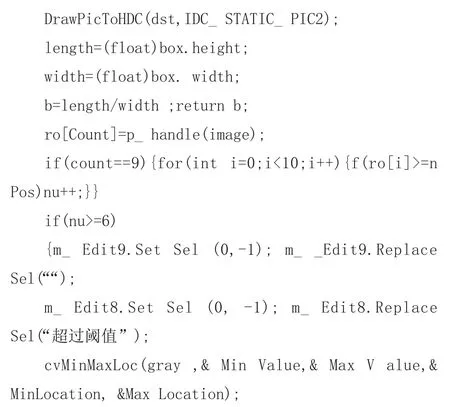
5.2 轴向比判别算法
在此基础上,利用OpenCV和VC++技术,对其进行了基于纵向燃烧特征(红外图像具有较大的纵向尺度)的分析。
相应的部分算法(判断阈值)实现代码如下所示:
5.3 其他算法
另外,根据火焰的外焰和外焰的分层特征,设计了基于火焰形状的不规则形状判别算法,并根据火焰形状的不规则特征来确定形状的不规则判别算法,以及消除光源如电灯等的干扰。将上述四种方法相结合,可以识别、检测出早期的火焰和火焰。
6 实验验证和分析
本论文完成了设计的火源位置与探测系统的试验,通过软件的开机和开启摄像机后的接口。在界面的右边,用户的移动电话和监控终端可以选择输入电话号码,完成CSM的报警。摄像头的界面下面有“检测”、“摄像头”、“手动”等调节按键,可以按照“管理员”的要求进行调节。报警器及火焰中心位置信息提示框,用于显示当前监视区的状况和火灾时的火焰位置。目前的温度门限是100,说明该地区的状况是正常的,并没有发生火灾[6]。
7 结束语
基于图像处理技术,结合红外基本原理、双目视觉测距理论和OpenCV视觉库,设计和开发了一套完整的火源位置和检测系统。该系统可以根据红外、轴向比、内外焰判别、形状不规则判别等多种不同的方法,对典型的火情图像进行识别,并运用双目视觉对火源进行定位。经实验证明,该系统具有良好的灭火效果,能够有效地检测和定位火灾。同时,这种方法对于开发类似的图像火灾检测系统具有一定的技术参考价值。
猜你喜欢
环球时报(2022-05-23)2022-05-23
中国测试(2022年2期)2022-03-19
金桥(2021年4期)2021-05-21
中国临床护理(2019年5期)2019-09-21
电子制作(2019年7期)2019-04-25
电子制作(2019年7期)2019-04-25
制造技术与机床(2017年8期)2017-11-27
文理导航·趣味课堂(2016年6期)2016-09-09
科技与创新(2016年12期)2016-06-25
故事作文·高年级(2009年7期)2009-08-20