
基于加权分簇的微机械传感节点能耗控制研究∗
2022-02-05 06:01:20杨光,顾红
传感技术学报 2022年12期
杨 光,顾 红
(1.南京信息职业技术学院网络与通信学院,江苏 南京 210023;2.南京理工大学电子工程与光电技术学院,江苏 南京 210094)
微机械[1]加工技术的发展下,微机械传感器逐渐被普遍应用。与普通的传感器[2]相比,微机械传感器更具有速度快、可靠性强、精度高的优势。将构建的微机械传感器与集成电路相互融合,就会形成一个一体化的微机械电子系统,该系统在整个电子机械中发挥着重要作用。微机械传感器的优势较大,但也有一个不可忽视的缺陷,那就是当微机械传感器节点较多时,容易消耗过多的能量,导致微机械传感系统发生故障,所以为了能够解决这种问题的发生,需要对微机械传感节点能耗进行控制。
当前针对微机械传感节点能耗控制问题也出现了一些较好的研究成果。Ali 等[3]提出了一种自适应CCA(A-CCA)定时机制,通过减少虚假唤醒和空闲监听模式下的节点时间来降低节点能耗。A-CCA帮助发射机在噪声地板以上的高流量和干扰环境中调整其无线电功率,使接收机能够监测发送方信号并相应地调整其唤醒周期,实现传感节点的能耗控制。但是,该方法忽略了对节点能耗的循环更新,导致对节点能耗的监测不准确。姚宏洋等[4]提出子模块可控放电集中式直流耗能装置及其控制方法,该方法首先利用分组阶梯策略降低直流产生的能耗,以此减小直流电压峰值,再利用控制策略控制子模块中的直流放电能耗,以此控制子模块内的电压能耗,从而实现整体控制,该方法减小的电压峰值不够完善,存在控制效果差的问题。倪磊等[5]提出面向低功耗无线传感器网络的智能拓扑控制算法,由于无线传感网络在运行期间容易忽视多跳中继区域问题,这会导致网络节点能耗剧增,为了避免这种问题的发生,该方法首先采集了网络节点功耗数据,再将这些数据组建成一个最大邻近节点拓扑,从中选取耗能最小的节点路径,以此实现整体控制。但是,该方法构建的邻近节点拓扑存有误差,存在能耗总和高的问题。张梅琼等[6]提出无线传感器网络分簇中能耗均衡控制方法,该方法根据无线传感器网络的传输半径,对网络节点的期望值计算,获取了网络的运行效率,再在各个簇首节点内建立最优簇,依据节点中的能量及其位置之间的关系,构建出能量表示模型,可以利用该模型显示出节点能量,最后利用簇头处理方法处理节点簇首,以此降低节点消耗的能量,从而完成节点能耗控制。但是,该方法存在生命周期运行轮数少的问题。
为了解决上述方法中存在的问题,提出基于加权分簇的微机械传感节点能耗控制研究方法。为进一步均衡化节点能耗,采用加权分簇法完成传感节点分簇、分组、深度控制和优化循环等,增强能耗的均衡性,优化传感节点的生命周期,微机械传感节点能耗控制效果得以提升。
1 微机械传感节点能耗影响因素建模
1.1 微机械传感节点的多跳传输
微机械是一种微电子机械系统,它主要由多个无线传感器组合而成。为了达到控制微机械传感节点能耗的最佳效果,首先需要分析出微机械传感节点能耗的整体影响因素。
假设微机械传感节点的整体覆盖区域是半径为R的圆形,若在这个圆形区域范围内,有很多微机械传感节点在该区域中抛洒,那么就可以根据抛洒的固定频率对微机械传感节点数据进行采集。
若各个微机械传感节点原始能量都相同,就可以有足够的能量将这些数据输送到基站B内,所以传感节点在多跳传输方式[7]下,微机械传感系统的整体拓扑结构就如图1 所示。
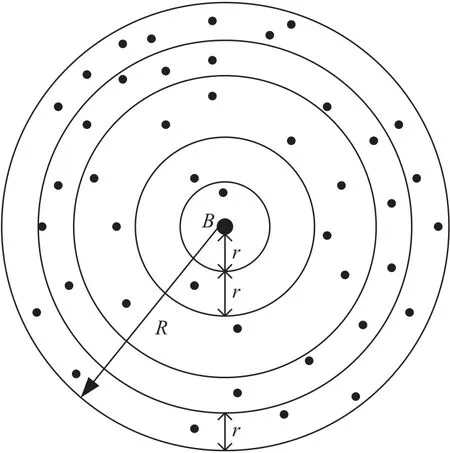
图1 微机械传感系统整体拓扑结构示意图
多跳传输方式与普通的传输方式不同,多跳传感模式是可以利用多跳的方式将各个微机械传感节点的数据输送到基站B 内。
微机械传感节点产生数据后,若要在圆环i 中将所有的节点数据全部输送到基站B,那么就需要在圆环中经过(i-1)个不同的圆环传感节点[8]的转发。这样就可以有效地的避免传感节点输送期间消耗过多的能量。
1.2 微机械传感节点能耗影响因素建模研究
基于1.1 节得到的微机械传感节点的多跳传输方式,对微机械传感节点能耗的影响因素建模研。一般情况下微机械传感节点对数据感知和计算时所消耗的能量要低于节点传输时的能耗,因而节点在传输期间需要忽略掉节点在传输过程中产生的重传问题[9]。那么在整个微机械传感拓扑结构中,圆环i 内的节点消耗的总能量用下述方程表达式描述:

式中:Ei表示节点总能耗,ETX表示微机械传感节点通过多跳传输方式输送节点时所产生的能耗,ERX表示微机械传感节点以多跳传输方式接收节点时所产生的能耗,Ti表示圆环i输送节点时所生成的负载,Ti+1表示圆环i+1 输送节点时所产生的负载数据包。
节点在圆环输送期间,Ti记作Ti=Si+ρ+Ti+1。其中,Si表示圆环i的整体面积,ρ表示微机械传感节点密度[10]。若圆环i+1 中的节点输送到圆环i中,那么Ti+1就会被转换到Ti内。
在整个微机械系统的最外层为圆环N,只需要输送节点数据而不接收数据,所以此时的节点负载TN就标记为:TN=SN+ρ。
外层圆环在传输节点数据时,要被圆环内的节点接收,经过不断的逆向迭代,计算出各个圆环的负载[11],用方程表达式表示为:

根据式(1)与式(2),即可获得微机械传感节点的总能耗,表示如下:

基于获取的微机械传感节点总能耗,计算出微机械传感节点的输送能耗和接收能耗,定义如下:

式中:Eelec表示微机械传感在输送节点和接收节点所产生的能耗,εamp表示传输时的能耗。
此时计算圆环N中的节点平均能耗,主要定义如下:

从而可以得知,微机械传感系统的整体拓扑会决定节点平均能耗的大小,而能耗与节点的密度无关。当节点距离微机械传感系统的中心较近时,所消耗的能量就越大。
2 基于加权分簇的微机械传感机械能耗控制
以上述微机械传感节点能耗分析结果为基础,采用加权分簇控制微机械传感节点能耗。主要分成四个步骤,分别是分簇[12]、分组、深度控制和循环,以此实现整体控制。
微机械传感节点全部都属于一个簇,在整个节点中节点ID 最大的就是整个簇的簇首,由于簇中的传感节点不能全部重叠,因此对这些簇实行分簇分组后再对其深度调节,最终对调节后的分簇优化,完成控制。
由于选出的微机械传感簇首节点的数量较多,而微机械传感系统的最大ID 节点是随机部署的,所以这就会导致簇首节点能量距离最大值远,这就会导致簇首节点在处理数据时消耗的能量较大。所以为了能够有效地对能量实行分簇,需要引入一个能耗差异性参数,标记为:W.Ecita。那么此时微机械传感节点的能量就如下式所示:

式中:W.E(i)表示传感节点能量,i表示节点,W.Eever(i)表示平均能量值。
根据节点能量值,将簇内节点W.Ecita的最小节点用作簇首节点,可表示为:D.head,这样传感节点的可用能耗就会接近最大化,也会均衡了整体能耗,提升了节点在微机械传感系统中的生存时间[13]。
为了减小节点在传输期间产生的能耗,所以设置dis(i,C)是整个传感节点的簇首[14],这样就可以缩短输送距离,降低能耗。那么计算出的微机械传感节点与簇内节点的平均距离为:

式中:(ai-aj)、(bi-bj)表示在相同的簇中任意两个传感节点的坐标。
结合上述两点分析,定义出两种参数。第一种为传感节点能耗的差异,标记W.Ecita;另一种是由节点的平均距离dis、W.Ecita、节点度数d构成的加权项Ssum。通过Ssum对节点作为簇首的可能性实行判断,从而计算出传感节点的加权项[15],用方程表达式定义为:

式中:x、y、z均标记为加权系数。其中,0≤x,y,z≤1,即x+y+z=1。每个传感节点都会给出不同的权重值,这样整个簇内的节点加权项就是Ssum。
由于权重项在不同环境下所产生的作用不同,所以需要根据各个节点的大小对其权重值实行设定,这样就能够获取在不同场合下的传感节点加权值,利用加权项选择簇首节点令其适用于任意微机械传感中。当y=z=0,x=1 时,表明微机械传感节点在影响因素下存在剩余节点,通过节点加权项获取最小节点;当x=z=0,y=1 时,表明微机械传感节点在影响因素下不存在剩余节点,计算节点与邻近节点之间的距离即可获取最小节点。
所以加权项Ssum要选取最小节点用作簇首,利用该簇首能量大、连通度强的特点,降低微机械传感节点传输能耗,以此均衡网络能耗,提升节点在微机械传感中的生存时间,完成基于加权分簇的微机械传感节点能耗控制。
3 仿真分析
为了验证基于加权分簇的微机械传感节点能耗控制研究方法的整体有效性,需要对该方法实行仿真分析对比测试。
采用所提的基于加权分簇的微机械传感节点能耗控制方法、文献[3] 提出的基于自适应CCA(A-CCA)定时机制的传感节点能耗控制方法以及文献[6]提出的无线传感器网络分簇中能耗均衡控制方法开展仿真分析测试。
①研究微机械传感节点能耗控制方法时,其最终控制性能是验证整体控制效果的核心,所以需要采用所提方法、文献[3]方法和文献[6]方法分别对微机械传感节点能耗实行控制效果测试。
本次仿真分析采用仿真软件对三种方法测试,根据测试结果比较三种方法,所采用的仿真分析参数如表1 所示。
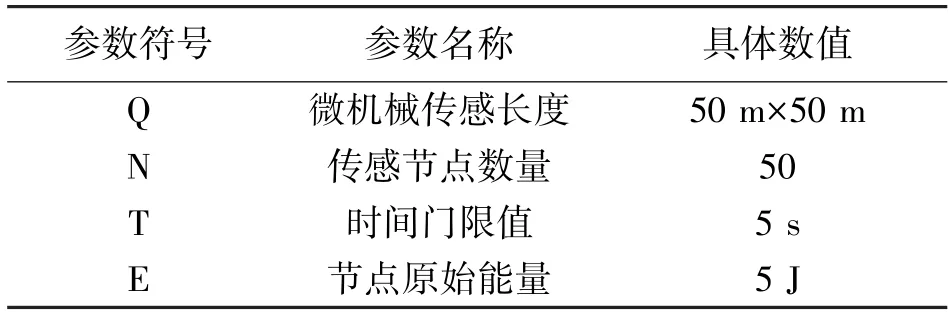
表1 仿真分析参数
根据表1 中的参数,给出仿真场景图,将微机械传感系统在长度为50 m×50 m 的区域中部署传感节点,设置传感节点的数量为50 个,将其随机放在固定的区域内。该仿真场景图如图2 所示。
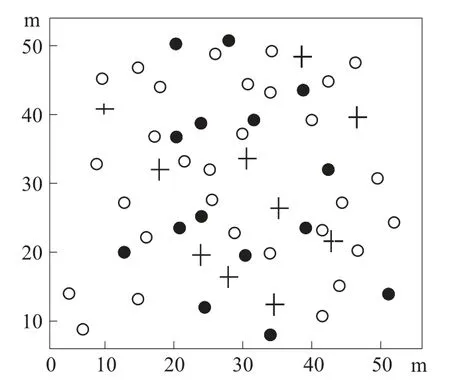
图2 仿真场景示意图
利用不同方法将图2 中的三种类型传感节点中簇首节点所产生的能耗相加,得出最终能耗总和,总能耗最低就说明该方法的控制性能最强,那么具体的测试结果如图3 所示。
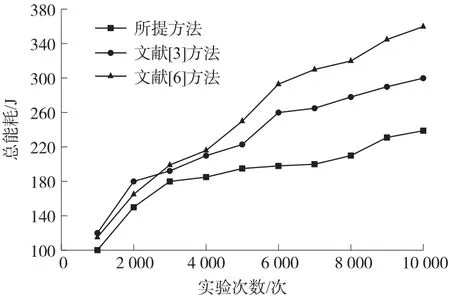
图3 不同方法的能耗总和对比
分析图3 中的数据发现,从整体测试来看,在10 000 次的仿真分析迭代过程中,文献[6]方法的能耗总和要高于所提方法和文献[3]方法,这主要是因为文献[6]方法存在生命周期运行轮数少的问题,导致文献[6]方法的最终能耗总和高,可见文献[6]方法的控制性能更差。与文献[3]方法相比,而所提方法在整体测试期间的上升速度较慢,同时总能耗最低。因而验证了所提方法的控制性能最强,控制效果最好。
综上所述,所提方法的总能耗最小,这主要是因为所提方法分析了微机械传感节点能耗影响因素,以此获取了导致传感节点能耗高的原因,大大提升了所提方法的控制效果,进而降低了所提方法的能量消耗总和。
②传感节点能耗控制效果的优劣决定了微机械传感系统拓扑结构的生命周期。因此采用所提方法、文献[3]方法和文献[6]方法分别对不同传感节点下的生命周期运行轮数实行仿真分析对比测试,设置生命周期运行轮数共有5 000 轮,生命周期越高表明该方法的节点能耗均衡效果越强,控制效果越佳,具体的测试结果如图4 所示。
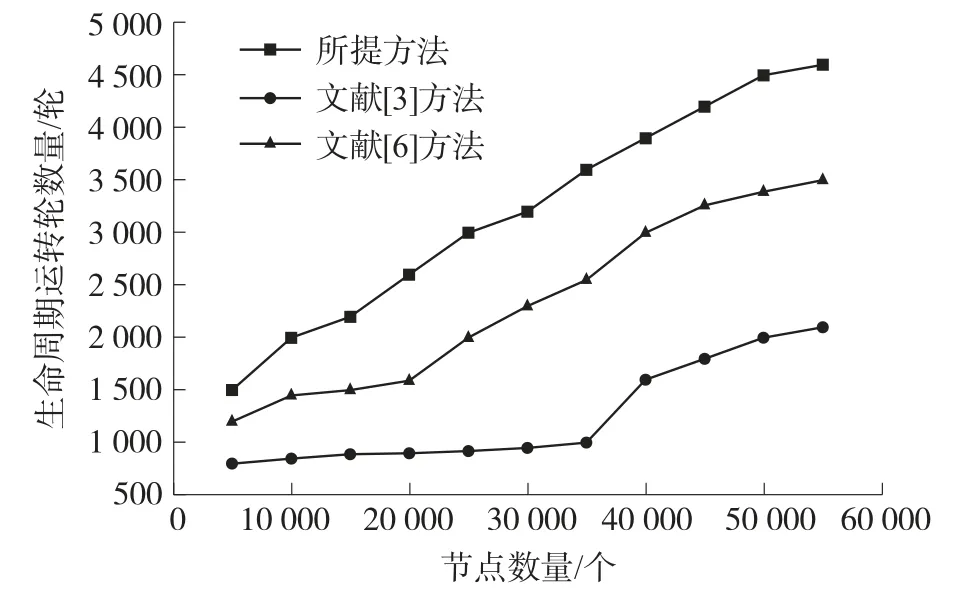
图4 不同方法下生命周期对比
如图4 可知,在最初测试时,三种方法的生命周期运行轮数大不相同,所提方法的初始轮数高于文献[3]方法和文献[6]方法,在后续测试期间所提方法的生命周期运行轮数始终高于其余两种方法。由此可以看出所提方法的生命周期运转轮数长,而文献[3]方法的生命周期运行轮数最短,验证了所提方法的传感节点能耗控制效果极佳,文献[3]方法的控制效果最差。
4 结束语
针对微机械传感节点能耗控制研究方法存在的问题,提出基于加权分簇的微机械传感节点能耗控制研究方法。该方法首先解析了微机械传感系统节点能耗的影响因素,基于分析结果利用加权分簇控制微机械传感节点能耗,实现了整体控制,该方法在节点能耗控制方法中占据着重要地位,在今后控制方法中有着长远的发展前景。
猜你喜欢
重庆交通大学学报(自然科学版)(2023年8期)2023-10-08 12:34:16
传感技术学报(2022年7期)2022-10-19 03:04:20
今日农业(2022年15期)2022-09-20 06:54:16
数学年刊A辑(中文版)(2022年4期)2022-02-16 08:17:56
现代畜牧科技(2021年4期)2021-07-21 06:13:34
现代畜牧科技(2021年5期)2021-07-20 08:07:20
网络与信息安全学报(2021年3期)2021-06-30 05:49:52
中国计算机报(2020年8期)2020-03-25 15:10:30
电子制作(2018年23期)2018-12-26 01:01:26
数学物理学报(2018年5期)2018-11-16 05:49:44
