
基于RTK定位技术的输电线路紧线施工无人机实时弧垂测量系统研究及应用
2022-02-02 08:48孙忠慧侯新文肖海涛杨景嵛
湖北电力 2022年5期
钟 燃,孙忠慧,侯新文,葛 雄,雷 雨,肖海涛,杨景嵛
(国网湖北超高压公司荆门运维分部,湖北 荆州 448000)
0 引言
为了充分发挥架空输电线路在电力资源调配以及区域传输方面的积极作用,充分满足经济发展、社会生活各个环节对于电力资源的使用需求,现阶段我国电力企业投入大量资源用于支持架空输电线路建设活动。而输电线路是一项基础性工程,具有复杂性、系统性特点,尤其是紧线施工,如若处理不当,势必会影响供电稳定性,良好的弧垂观测和调整,是确保线路运行安全的关键[1-7]。
目前,架空输电线路的施工过程中,弧垂观测主要采用等长法、异长法和角度法等3 种人工观测方式。其中等长法、异长法需要人工登塔检测,风险系数高、测量误差大,而角度法只需在地面使用经纬仪即可进行测量,具有安全、精确等特点,已逐渐成为行业主流的弧垂观测方法。但角度法仍然需要依靠人工观测,其测量的结果仍旧难免会受观测人员的经验知识、操作技能、作业规范程度等人为因素的影响,存在一定的局限性[8-13]。基于以上背景,本项目将深度融合无人机、激光雷达、高精度卫星定位等前沿技术,研究一种基于RTK 定位的输电线路紧线施工无人机实时弧垂测量系统,通过该“机器换人”的创新作业模式,提高弧垂测量的自动化和智能化程度,解决架空输电线路弧垂自动测量的难题并实现提质增效。
1 基于RTK定位的无人机实时弧垂测量系统简介
基于RTK 定位的输电线路紧线施工无人机实时弧垂测量系统,针对输电线路紧线施工环节,研究通过无人机搭载激光雷达,自动探测、记录相邻两基输电线路杆塔的绝缘子挂点的高精度位置信息,根据探测到的定位信息,结合特定的公式,计算出设计弧垂垂点的高精度位置信息,而后人员操作无人机飞至垂点的位置并悬停,以此作为位置标记,再通过绞磨机将导线收紧至无人机悬停的位置,最终完成输电线路紧线施工的工序[14-17]。
2 基于RTK定位技术的输电线路紧线施工无人机实时弧垂测量技术
2.1 无人机与绝缘子挂点自适应距离智能调节技术研究
应用PID控制算法对无人机的俯仰与偏航进行闭环控制,使无人机与目标绝缘子挂点始终保持固定垂直距离以及水平距离。无人机搭载的激光雷达能够对前方的障碍物进行距离探测,并且强大的扫描分辨率能够识别诸如导线等细微物体,使得无人机具备自主避障功能[18-21]。本研究对无人机垂直以及水平方向控制采用增量式PID 控制器,其设计增量式PID 算法的输出量为:

式(1)中,e(k)、e(k-1)、e(k-2)分别为第k次、k-1 次和k-2次测量值与设定值之间的偏差值,Kp、Ti、Td分别为比例系数、积分系数和微分系数,T为采样周期,u(k)为控制器的输出量。无人机与目标绝缘子挂点之间水平距离与设定距离的偏差值e1以及无人机与目标绝缘子挂点之间垂直距离与设定距离的偏移量e2后,将此两个值分别输入到增量式PID 控制器中,控制器根据计算结果输出水平方向以及垂直方向的控制值从而控制无人机运动。
无人机左右侧装有FOV红外避障,FOV红外避障模块通过红外激光的一发一收以及长条发射能够有效探测距离达7 m,感知范围为水平方向70°、垂直方向20°的锥体区域内的障碍物。无人机对目标绝缘子挂点进行位置测量时,可以设定相应的安全距离阈值。一旦无人机探测到四周的距离低于这个阈值,即无人机可以实现紧急停止,确保无人机设备的安全。
2.2 无人机搭载激光雷达自动探测导线技术研究
无人机飞行平台沿着高压线路搭载光学相机定点飞行至需要检测区域,然后开始利用IMU 高精度角度传感器进行角度扫描测量,结合二维激光雷达扫描到的距离数据,以及无人机搭载的空间定位系统进行采样的空间位置数据,可以获取该区域空间点云数据。通过基准站上的GPS 接收机和数据发送电台,实时确定无人机的飞行位置,最终利用无人机飞行姿态参数的修正实现高精度位置测量任务。同时,记录交叉跨越式的上下两个点云集数据记录在内存空间中,规划设计无人机飞行平台的飞行路线,对待检区域进行分块,而后对每块区域采集到的空间位置数据进行统计和分析[22-24]。
架空输电线路导线空间位置点云数据拟合分析技术原理如下:
在空间中以所述无人机起飞点参考点O,取一直角标架[O,e1,e2,e3];无人机相对参考点O 的位置为P(x',y',z');P'(x',y',0)为点P(x',y',z')在xoy平面的投影;两座高压线塔之间的电线为黑色粗直线L1、L2(为了作图简洁,此处以直线代替曲线)如图1 所示;M1(x1,y1,z1),M2(x2,y2,z2)是高压电线L1、L2 上的点相对于参考点O的直角坐标信息;显然有M1PM2平面平行于xoy平面。以P为参考点建立的极坐标系下,M1(ρ1,θ1)、M2(ρ2,θ2)是如图2所示目标高压电线L1、L2上的点M1、M2相对于参考点P的极坐标信息。
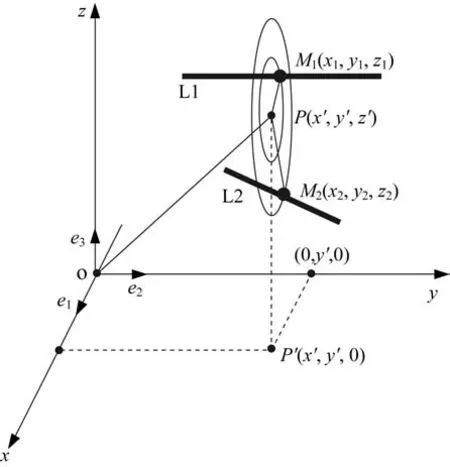
图1 模拟高压电网空间图Fig.1 Space diagram of simulated high voltage power grid
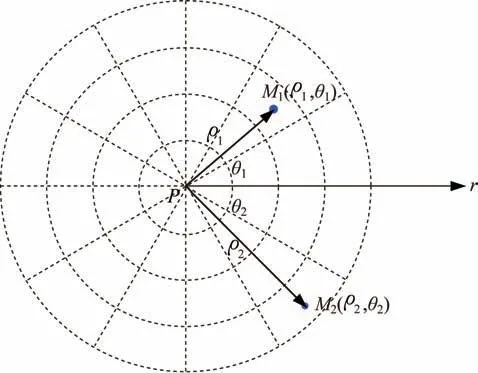
图2 以无人机为参考点的极坐标系图Fig.2 Polar coordinate system with UAV as reference point
通过无人机空间定位技术以及IMU角度检测技术可以获得P(x',y',z')的高精度数据;激光雷达提供目标 高 压 电 线L1、L2 上 点M1、M2的 极 坐 标 数 据M1(ρ1,θ1)、M2(ρ2,θ2),所以目标高压电线L1、L2 上点M1、M2的直角坐标数据可以通过如下方式计算得出

式(2)~式(4)中,i=1,2。
从而根据高压导线空间点云数据,模拟高压电网空间。要模拟架空高压线L1 和L2 净空距离曲线,需要通过距离公式展开进一步计算:

由观测数据,拟合结果freal(t)近似一元二次函数。
因为系统误差、偶然误差不可能完全消除,所以这里用最小二乘法对距离曲线做进一步优化:
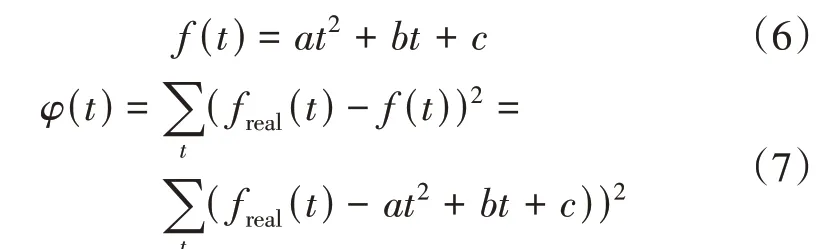
求解上面方程组式(6)、式(7)可得净空距离拟合函数f(t)的准确表达式,进而可以在二维平面上做出净空距离拟合函数图像。
2.3 无人机架空输电线路导线弧垂检测技术研究
无人机搭载激光雷达飞行至相邻两座输电线路杆塔的绝缘子挂点附近位置,通过高精度位置测量技术对绝缘子挂点进行位置测量,分别获取到两个绝缘子挂点的高精度位置数据,无人机再自动将位置数据发回至地面站,然后由地面站应用中基于特定公式编写的算法对位置数据进行计算处理,从而获得导线的弧垂垂点位置数据,而后操作无人机飞至垂点位置并悬停,最后将导线收紧至无人机悬停的位置[27-30]。
在图3所示的现场测量示意图中,A为导线起点;B 为导线终点;C 为导线中任意一点。无人机飞行的RTK,经过处理得到一条拟合后的曲线,由此可知导线所有点空间信息,则可知A、B、C 3 点的度分别为H1、H2、H3 和AC、BC 两点的距离为d1、d2,根据以A 点坐标的0 高度为坐标原点,则A、B、C 3 点的坐标分别表示为(0,H1)、(d1,H2)和(d2,H3)。将3点的坐标拟合成一条一元二次的曲线ax2+bx+c= 0 和AB 连线的一元一次方程kx+c= 0,则可分别求出a、b、c、k的值。已知方程的表达式,则弧垂距离F的表达式为:
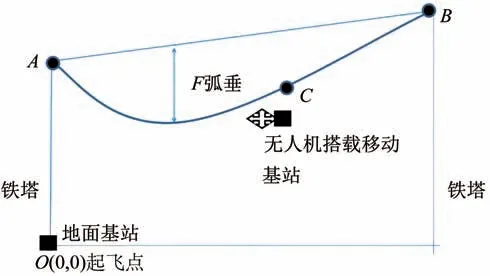
图3 现场测量示意图Fig.3 Schematic diagram of field measurement

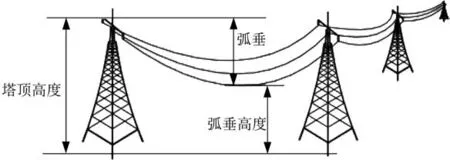
图4 输电线路弧垂示意图Fig.4 Sag diagram of transmission line
3 结语
本文针对输电线路紧线施工中使用弧垂观测3种人工观测方式的局限,通过RTK 定位,利用无人机开展实时弧垂测量,推动架空输电线路施工技术向高精度、自动化、智能化方向发展。基于RTK 定位的无人机实时弧垂测量集合了3 项技术,包括无人机与绝缘子挂点自适应距离智能调节技术、无人机搭载激光雷达自动探测导线技术和无人机架空输电线路导线弧垂检测技术,融合了无人机、激光雷达、高精度卫星定位等前沿技术,可以替代传统的人工观测方法,有利于速度更快、效率更高、成本更低、操作更易、精度更高地开展架空输电线路的施工。
猜你喜欢
北京测绘(2022年5期)2022-11-22
电力勘测设计(2022年8期)2022-09-05
直升机技术(2021年4期)2022-01-12
今日农业(2021年20期)2021-11-26
汽车观察(2021年8期)2021-09-01
中国交通信息化(2019年1期)2019-03-26
海峡科技与产业(2018年7期)2018-12-08
电子制作(2018年17期)2018-09-28
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28
