投弃式海流剖面测量仪旋转测试系统研制
2022-02-01 04:18刘云梁陈光源杜立彬刘云龙
海洋技术学报 2022年6期
刘云梁,陈光源,杜立彬,刘云龙
(1.山东科技大学海洋科学与工程学院,山东 青岛 266590;2.国家海洋局北海环境监测中心,山东 青岛 266033)
投弃式海流流速剖面测量仪(Expendable Current Profiler,XCP)[1-4]是一次性使用的海流剖面观测仪器,利用其探头在海水中自由下落的过程,快速获取海水垂直剖面海流速度,已被广泛用于海洋科学调查、鱼情环境调查,以及海军舰船的机动海洋动力环境观测中。美国华盛顿大学应用物理实验室SANFORD T B等[5-6]于1971年提出了海水运动感生电磁场的基本计算公式,并于1978年成功研发出了第一台投弃式温度速度测量仪(Expendable Temperature and Velocity Profiler,XTVP)。目前,XCP相关技术被日美两国垄断,对非盟友国家开展技术封锁,我国无法获得相关产品及技术。我国海洋投弃式设备的研究最初主要集中在海洋温度、盐度、深度测量方面。对于投弃式海流测量研究的大规模支持开始于2006年,山东省科学院海洋仪器仪表研究所、国家海洋技术中心、中国地质大学(北京)、河北工业大学和山东科技大学等均开展了测量原理、结构外形、流速传感器的相关研究,形成原理样机,获得了初步的探测成果[7-13]。
XCP研制的难点之一在于其测量基于天然地磁场[14-16],且测量间距极小,从而导致海流感生信号水平极其微弱。为了获取极低的电磁场感生信号,需要通过XCP探头在海水中的高速自旋转运动从而实现对微弱信号的调制和提取。自旋转速度与采集电路的匹配、对噪声的滤除水平是有效获取海流信号的关键因素之一。为了测试上述XCP探头自旋运动对海水中微弱信号的提取水平,本文开展海洋测量探头水中高速旋转模拟测试系统的研制,在室内水槽中模拟XCP探头在海水中水平方向的高速自旋转运动。针对室内水槽模拟测试面临的实际问题,重点解决环境磁场干扰,大规模海流模拟,水中稳定高速转动等问题。采用无磁旋转结构设计减小电磁干扰,对称轻巧的设备安装方法设计减小高速旋转下的形变及轴向偏移,模块化的采集电路及采集预处理软件设计,使研制的测试系统能够通过模块的替换应用于其他测试设备,丰富海洋设备实验室测试手段。
1 XCP测量原理
XCP基于电磁感生原理,测量探头在海水中自由下落的过程中,采集海流切割地磁场产生的感生电信号,并通过探头本身的10~20 Hz的高速自旋运动,实现信号的调制,再将调理信号通过无线方式传送至接收平台,实现固定或走航情况下的快速流速垂直剖面测量,工作示意图如图1所示。图1中XCP测量探头存在如蓝色箭头所示两个方向的运动:垂直下落和轴向自旋。
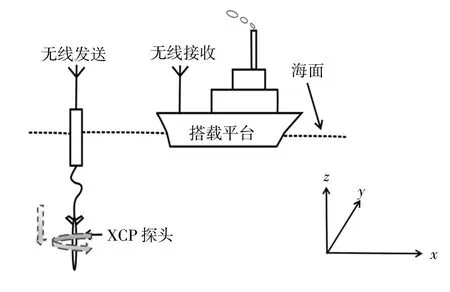
图1 XCP测量工作示意图
建立如图1所示坐标系,x轴指向东,y轴指向北,z轴竖直向上。当海流以速度V沿任意方向水平流动时,切割地磁场磁感线,产生感生电压。当感生电压的测量方向与y轴存在一个夹角(测量方位角θ)时,水平放置的距离为L的两个海流传感器之间探测到的海流感生电动势如下。

式中,VE、VN分别为海流速度的东向分量和北向分量;Fz为地磁场的垂直分量。
投弃式海流剖面测量以天然地磁场作为场源,感生电场规模及电压大小与海流尺度及速度相关。由于天然地磁场幅值水平较低,在海面上约为几个纳特,且随着海水的深度增加,电磁波被海水层大幅衰减,进而导致感生电场水平也逐渐变小。根据公式(1)可推算得知,中低纬度地区,速度为1.5 cm/s的海流,产生感生电场量值约为几个uV/m。XCP中的海流传感器布设在测量探头同一高度横截面的两端,测量间距为几十厘米。针对1.5 cm/s的测量精度,XCP需能够采集低至nV水平的感生电场信号(约为50 nV/Hz-1)。图1中所示探头水平方向的旋转运动是实现nV信号测量的重要方法之一,也是本文模拟系统研制的主要目标。
2 旋转测试系统设计
2.1 总体架构
基于地磁场的海流探测设备的工作方式与其他原理的流速测量的显著区别在于需要在探头下落过程中伴随自身的高速旋转(即如图1蓝色箭头所示的两个方向的运动)。为了模拟XCP测量探头在海水中高速自旋转的测量环境,本文设计了一种可用于室内流速水槽的低噪声旋转测试系统,用于分析验证所研制的XCP测量探头的自旋运动对信号采集的有效性。
本文设计的测试系统包括高速自旋结构、实时采集硬件电路模块、预处理存储软件模块3个主要部分。高速自旋结构是本文设计的主体结构,通过无磁旋转结构设计,重点解决动力系统噪声屏蔽、高速自旋、水中旋转姿态稳定等问题。实时采集硬件电路模块通过多级放大滤波,实现采集信号的实时采集和预处理。预处理存储软件模块用于采集数据的预处理和存储,实现测试系统数据的直观显示。自旋模块是完成硬件采集和软件显示的前提,硬件采集和软件显示是自旋模块的最终表现和反馈手段。通过三者相互配合,实现探头水中高速自旋转情况下的海流电磁感生信号采集测试。根据XCP探头测试需求,该装置主要实现功能包括:转动速度为13 Hz、14 Hz、15 Hz、16 Hz、17 Hz、18 Hz共6档可调;屏蔽50 Hz为主的工频干扰;实现nV水平海流感生电场信号的实时采集等。
在室内水槽实验中,旋转测试系统受到海水多方向力的影响,实际的自旋转速度是否能够达到预设、与滤波电路中心频率的匹配程度、自旋过程中是否出现轴向偏转误差等是在系统设计及实际实验中重点要解决的问题。
2.2 高速自旋结构设计
对比空气中的旋转结构,在水中的高速旋转模拟结构设计中,除了满足上述实验目的和需求外,还需考虑外部动力结构对测量环境的电磁噪声影响,水中实际旋转过程中对探头周围流场的扰动,以及测试水槽的边壁效应等问题。
为此,本文设计专门用于海水中高速自旋转测试结构,结构设计如图2所示。该自旋测试结构主要包括:①动力结构:用于带动测试结构主体旋转,模拟XCP探头在海水中的自旋转;②旋转结构:用于固定测试探头及流速传感器,减小高速旋转中出现的轴向偏移,并在旋转测试过程中减小对传感器周围流场的干扰;③固定支撑结构:安装在实验流速水槽顶部,用于将动力结构和旋转结构固定,并保证流速传感器置于流速水槽中深度可调。

图2 旋转结构设计图
2.2.1 主体旋转结构设计
测试系统的主体结构为带动测量探头旋转的圆筒形结构,用于固定探头,起连接动力结构的作用。为了减小旋转过程中海水的阻力及因旋转产生的流场扰动,主体旋转结构为空心圆柱形设计,圆柱内径10 cm,整体结构重量约2 kg。将整个旋转结构及测试探头的质点选在半径1/2位置的圆柱面上,根据转速与离心力关系(式(2)),可求得平均离心力大小约为274 N。其中,RCF为相对离心力,单位g;N为转速,单位r/min;R为离心半径,单位cm。

同时,为了避免金属材料对探头主体产生电磁干扰,整体采用ABS(Acrylonitrile Butadiene Styrene plastic)进行代替材料制作。实际测试时,将探头的首端固定在旋转结构支撑筒顶部,探头主体置于支撑筒内。探头中部通过辅助结构与旋转圆筒固定,通过调节辅助固定结构调整探头固定的松紧程度。探头尾部置有流速传感器,整体暴露在待测海水中。
2.2.2 动力结构参数选择
选用小型直流电机及减速机作为旋转测试装置的动力结构,用来带动测试探头在室内水池中以不低于1 000 r/min的速度旋转。为了减少电磁干扰影响,旋转结构采用非金属材料,为保证这两部分的良好连接并避免转动偏角,选择刚性联轴器作为动力传输部件,能够较好地补偿由于高速运转而产生的相对位移。
用于室内水槽实验的XCP测量探头仅包含信号采集舱体(包括传感器和电路板),未安装探头配重及千米级数据传输导线,故总重量不超过3 kg。由于旋转装置为圆筒形结构,海水对圆筒整体的力之和为0。根据受力、力臂与力矩、功率的关系,可确定直流电机参数。

式中,F为受力,单位N;D为力臂,单位m;T为扭矩,单位N·m;P为输出功率,单位kW;N为转速,单位r/min。
合适的电机轴套杆长度能够进一步保证主体旋转结构的稳定、无偏转动,根据式(4)可计算所需电机轴的套杆长度。

式中,P为直流电机的额定功率;K为键槽系数;A为指定系数;η表示从电机到输出轴之间的传动效率的乘积;Nj为输出轴的计算转速。
2.3 信号采集模块设计
为了使本文所研制的海洋旋转模拟测试系统能够应用于不同设备的测试,设计专门的信号采集模块对传感器信号进行实时采集和预处理。信号采集模块置于实验水槽外部,通过导电滑环与旋转测试结构上的传感器进行连接,从而避免高速自旋转导致数据线缠绕。
由XCP测量原理可知,海流切割地磁场产生的感生海流信号较小,测量间距小于1 m的情况下,厘米级海流产生感生电场信号为纳伏级水平。为了有效获取海流感生信号,对原始信号采取两级放大设计,并根据测试装置旋转频率,进行锁相放大,提高采集精度。信号采集处理流程如图3所示。

图3 信号采集模块原理图
原始的海流感生信号在探头的高速自旋转运动下被调制为交流信号,并频移超低噪声频段。以有效信号频率为中心频率,对采集信号进行带通滤波,初步滤除噪声干扰。通过电路产生参考信号,对目标频率的有效信号进行锁相放大,放大倍数250倍。然后对信号进行次级滤波,并进一步放大2 500倍。从而实现nV海流信号采集。
2.4 软件数据预处理模块
海流传感器测得海流感生电场信号通过数据线经导电滑环传送至水面的数据采集模块进行滤波放大,然后通过串口或USB方式传送至上位机进行处理、显示、存储。本文基于Matlab软件编写数据预处理程序,实现测量数据的实时显示、分析及存储。采集程序编写流程如图4。测试系统硬件组装完成后,硬件系统通电,旋转结构带动探头在水中开始高速旋转。上位机采集控制软件发送检测指令,检测电路连接是否正常,若检测不通过,则结束采集流程,关闭硬件电源,进行电路检测,排查是否出现接线端密封不严等问题,避免电路烧毁。若检测通过,则继续发送数据采集指令,上位机开始接收、存储并显示传感器采集到的电信号。采集完成后,可通过采集软件选择是否对电信号进行预处理,若不需要进行预处理,则结束采集流程。若选择进行预处理,则调用外部数据处理程序,实现电信号转为测试物理量的预处理。
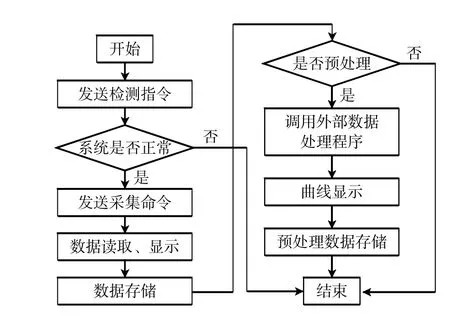
图4 预处理存储软件流程图
针对不同的测试对象,此处可调用不同的数据处理程序段。对于本文的海流测试,则调用预先编写好的电信号转换为海流数据的程序。经预处理后的数据,可通过上位机软件进行曲线的显示,预处理后数据的存储等功能。
3 旋转结构对流场影响水槽试验
为了测试本旋转系统的有效性,本文于2021年8月在国家海洋局北海环境监测中心开展水动力大尺度流速环境下,开展XCP探头旋转模拟测试试验。该中心的渤海生态预警与保护修复重点实验室建有大型水动力波浪流模拟水槽,占地面积约125 m2,水槽长32.0 m,内宽0.8 m,内深2 m,最大工作水深1.5 m,工作介质可使用海水。1.5 m工作水深时可产生0.1 m/s内可调的匀速、平稳流场,能够满足本实验需求。在本实验中,采用Nortek Vectrino Profiler声学多普勒定点流速仪作为比测设备,用于测量旋转结构运行时对周围水流速度的影响,以及在旋转结构辅助下XCP的流速测量效果分析。为了便于对比分析,本文直接采用经硬件采集模块及软件处理模块处理的流速数据,讨论对处理后的流速数据的影响。实验设备具体布设情况如图5所示。
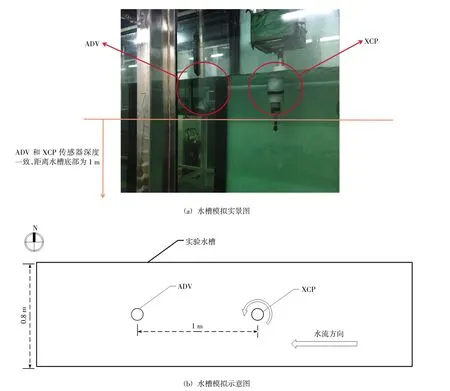
图5 旋转结构水槽实验图
3.1 旋转测试系统转速特性试验
实际XCP在海试过程中的旋转采集频率为10~20 Hz,据此,在实验过程中对不同的电机转速进行了测试。通过电机控制器改变直流电机速度,然后软件模块记录实际XCP旋转频率,测试结果如表1所示。转速特性较好,相对误差随转速增大而减小,最大误差出现在15 Hz,转速平均误差为0.27%。
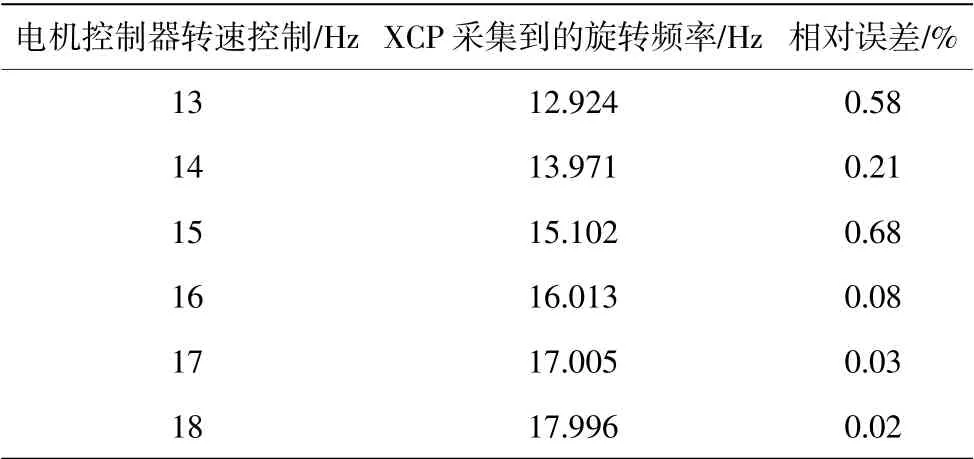
表1 旋转测试系统转速特性
3.2 旋转测试系统辅助XCP流速测量试验
为了研究旋转结构在海水中运动时,对测点附近流场的影响情况,首先设计海流速度为0 cm/s情况下的流速比测实验。将ADV与旋转测试系统在水槽中等高度,间隔1 m布设(图5)。在水中旋转结构16 r/s运行及停止情况下,采集声学流速仪记录的水流平均变化(水温22.07℃,采样率20 Hz,采样点2 535个),并计算流速标准偏差,如表2所示。由测试结果可知,水中旋转测试系统的运行对海水垂直方向速度(Vz)影响明显,最大标准偏差约为0.022 cm/s。对水平方向流速(Vx、Vy)影响较小,最大相对误差约为0.01 cm/s。针对XCP水平方向1.5 cm/s的测量精度要求,该旋转测试系统对水平方向流速影响不超过XCP流速测量精度要求的1.4%,可以满足XCP室内测试需求。

表2 旋转结构对流速影响数据分析
为了进一步研究利用旋转测试系统开展XCP流速测量的有效性,在流速水槽不同造流档位下(以造流发电机工作电流强度分档:8 A、9 A、10 A、11 A、13 A),开展ADV与旋转测试系统辅助下的XCP流速测量对比测试。由于造流水槽的造流精度有限,且两种测试设备对海流采集的基本原理不同,精度及误差来源也有所区别,因此重点对两种设备采集流速参数进行趋势比较,开展定性分析。如图6所示,ADV与旋转测试系统辅助下的XCP采集的流速数据曲线整体变化趋势一致,声学法测得流速值整体略高于电磁法,可能是由于水槽金属钢筋骨架及造流发电机对地磁场产生轻微干扰导致。最大流速误差出现在造流电机9档速度位置,速度偏差0.052 1 cm/s。对于1.5 cm/s的XCP测量精度,该偏差约为总精度的3.5%,可满足室内XCP测试需求。

图6 ADV与XCP(组合旋转测试系统)旋转流速对比
4 结 论
根据海洋电磁流速剖面测量技术的实际测试需求,本文设计出一种可用于室内流速水槽的低噪声旋转测试装置,配合上位机数据采集处理程序实现旋转探头感生信号采集实验。通过室内流速水槽试验证明,该测试系统能够有效模拟XCP探头海水中的高速自旋转过程,整体结构对水流流场分布影响及电磁干扰程度较小,并可应用于其他同类型测量设备的模拟测试中,得出主要研究结论如下。
(1)本文设计的水中旋转测试系统充分考虑了海洋环境测试的需求和特点,其机械结构部分以低磁场干扰及小轴向偏转研究为核心,通过旋转测试结构离心力分析,材料、部件、结构外形设计,减少磁性材料和活性连接结构使用,保证在高速旋转情况下,探头对海流电场信号的有效测量。
(2)在软件设计部分,采用模块化数据采集预处理设计,可根据实际测试对象需要对采集除了软件进行替换修改。通过与水中旋转机械结构的对接,实现多种海水采集设备的旋转测试,使该测试系统具有更广泛的适用性。
(3)该旋转测试系统已在北海监测中心的流速水池中完成了为期一个月的实际测试,测试介质为海水。测试结果表明,该测试结构机械转动部分相对于探头自旋转的情况,其对于静态水流测试的影响在水平方向上不超过0.022 cm/s,该误差不超过XCP流速测量精度要求的1.4%,可以满足XCP室内测试的需求。
在后续的研究中,需进一步改进结构设计,增加横向拖曳功能,模拟探头轴向运动及旋转同时存在情况下,探头数据采集情况,使室内水槽测试更加接近真实海洋探测情况。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
初中生学习指导·提升版(2022年4期)2022-05-11
中学生数理化·八年级物理人教版(2022年4期)2022-04-26
发明与创新·小学生(2021年11期)2021-12-24
发明与创新(2021年43期)2021-12-15
大众科学(2020年7期)2020-10-26
中国海洋大学学报(自然科学版)(2020年8期)2020-08-03
中国海洋大学学报(自然科学版)(2020年8期)2020-01-07
小天使·五年级语数英综合(2018年9期)2018-10-16
小天使·六年级语数英综合(2018年1期)2018-10-08