基于STM32单片机控制的智能导盲手杖设计
2022-01-26 06:12:46吴煜霞吴宇辉杜海英张峰瑀许帅康丛丽颖孙鹏程
扬州大学学报(自然科学版) 2021年4期
吴煜霞, 吴宇辉, 杜海英, 张峰瑀, 许帅康, 丛丽颖, 孙鹏程
(大连民族大学机电工程学院, 辽宁 大连116600)
据世界卫生组织统计,截止2021年底,我国盲人数量达1 700万,占世界盲人总数的18%[1].如今交通状况日趋复杂, 城市无障碍设施已无法满足盲障人士出行的基本需求.随着无线通信和传感器技术的飞速发展,随着传感和显示技术的进步, 电子导盲辅助设备逐步取代了传统导盲工具,从听觉和触觉通道为盲障人士呈现了丰富的环境信息.现有电子导盲辅助设备按功能可分为导航辅助和移动辅助两类[2-3], 其中导航辅助功能通过全球定位系统(global positioning system, GPS)、激光测距或射频识别等技术提供定位信息, 规划最佳出行路线[4-5]; 移动辅助功能通过声音和触觉导引装置, 判断行进路径的安全性[6].还有些导盲辅助设备具有语音报警系统, 根据行进路径中的障碍物信息等发出相应的语音报警信号, 预防危险碰撞[7-9].但现有电子导盲辅助设备往往存在功能单一, 不便携带和检测速度慢等问题,影响出行体验.为解决上述问题, 本文基于STM32单片机, 拟设计一款多功能智能导盲手杖, 手杖集全球定位系统、无线呼救、红外循迹、语音交互和超声波避障等功能于一体, 从盲人制定出行计划开始, 提供全程导航定位,行进过程盲道红外寻迹, 中远距离超声波避障,实时语音播报,防丢失、防摔倒提示以及智能呼救等移动辅助功能,为盲障人士出行提供便利.
1 总体设计
智能导盲手杖主要包括手柄、图像识别传感器、语音播报传感器、手杖支架、陀螺仪、连接盒、底轮、红外传感器和照明灯等, 具体如图1所示.手柄前部内置颜色识别装置、振动马达和语音识别系统,外部采用软橡胶材质,舒适防滑; 手杖支架为高硬度铝合金材质,轻便且不易折断; 控制系统和电源置于手杖底部连接盒内,连接盒前部设有超声波避障传感器, 底部设有红外传感器,以此进行循迹任务.
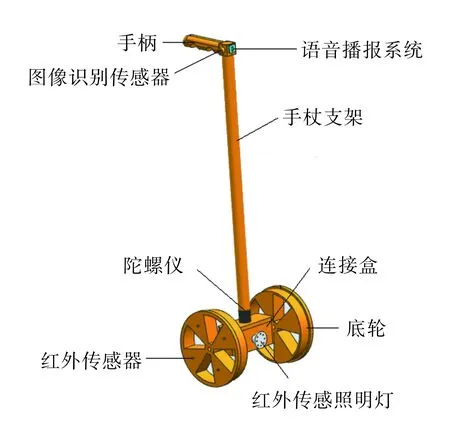
图1 智能导盲手杖外观设计图
2 硬件设计
本研究采用STM32F103ZET6单片机作为主要控制芯片,具体设计方案包括超声波避障系统、导航与定位系统、红外循迹系统、摔倒检测系统、语音系统、运动系统六部分.智能导盲手杖系统主要硬件电路图如图2所示.
1) 超声波避障系统.采用4个SSD-ME007TX超声波传感器组成2×2的传感器检测阵列, 检测手杖周围2~3.5 m以内的障碍物.超声波模块分别与地和电源相接, 给脉冲触发引脚(trig)输入一个20 μs的高电平方波, 模块会自动发射8个40 kHz的声波, 回波引脚(echo)端的电平由0变为1, 定时器开始计时; 当超声波返回被模块接收时, 回波引脚端的电平由1变为0, 定时器停止计时.由定时器得到超声波从发射到返回的总时长t, 结合声音在空气中的传播速度va=344 m·s-1, 计算测试距离S=va×t.完成测距后, 以串口形式输出距离值, 并将信号同步至语音输出.

图2 控制器系统主要硬件电路图
2) 导航与定位系统.GPS系统选用ATK-NEO-6M-V12模块(星翼电子科技有限公司, 广州), 该模块由具有167个通道的S1216F8-BD模块组成, 追踪灵敏度达-165 dB·m, 测量输出频率20 Hz.GPS模块与MCU为串口通信, GPS模块获取手杖所在经纬度、高度和行进速度后,与MCU串口3相接实现数据的存储与通信.持杖人通过WEGASUN-M6模块语音交互确定行进目标位置后,导航与定位系统进行路线优化选择及语音播报.工作时启动GPS实时定位,实现手杖位置信息共享,亲友可通过手机终端实时获取手杖位置信息,预防持杖人走失.
3) 红外循迹系统.采用TCRT5000红外传感器,接收不同反射光检测信号,控制器根据电平信号控制电机转速和方向,实现手杖的红外循迹功能.行进过程中,行人遇到交通信号灯时,TCS230颜色识别模块自动开启,光接收元件CMOS成像传感器将接收的光信息分析为三原色(RGB)后识别各自的灰度级,转换成电平信号传输给TCS230颜色识别模块,辨别交通信号灯颜色信息,判断是否可通过路口.
4) 摔倒检测系统.采用MPU6050陀螺仪完成持杖人的摔倒检测.MPU6050陀螺仪是一款集三轴MEMS陀螺仪、三轴MEMS加速度计和1个可扩展的数字运动处理器(digital motion processor, DMP)于一体的九轴运动传感器.通过三轴陀螺仪和三轴MEMS加速度计分别测量手杖的角速度和加速度,判断手杖具体方向,以此检测持杖人是否摔倒.
5) 语音系统.采用集语音识别、语音合成、语音点播、射频功能、红外功能于一体的WEGASUN-M6模块, 通过TTL串口(UATR)方式接受指令并返回结果, 实现语音功能.该模块支持扩展红外编码学习功能,通过识别特定语音完成相应指令,达到控制效果.内置语音识别和语音播报模块可实现人机交互,如在判断持杖人摔倒后询问是否需要联系紧急联系人等.
6) 运动系统.手杖轮毂采用高硬度铝合金材质, 轮宽30 mm, 外侧凸起5 mm, 凸起部分宽1 cm, 底轮向内倾斜80°, 与盲道吻合度高,确保行进过程更加平稳.行进过程中采用两轮差速运动方式实现转弯, 前进时底轮逆时针旋转,后退时顺时针旋转.行进过程中,通过控制器将目标速度传输给控制电机,保证两个底轮在直行过程中同时同速行进.当手杖转弯或者出现循迹偏差时, 通过改变其中一个电机的速度,实现转弯或调整.
3 软件设计
智能导盲手杖系统通过调用STM32库函数和操作寄存器对超声波避障模块、红外寻迹模块和GPS定位模块等进行模块化编程.图3为智能导盲手杖系统主程序流程图.
超声波避障过程中,由超声波探头检测信号经控制器传给霍尔直流编码电机, 通过主控STM32定时器编码, 结合M法测速, 每隔10 ms读取一次电机编码器的数值, 将底轮速度作为实际值.根据增量式PID速度控制算法[10-11], 调整电机目标速度pw=KP·Bi+Ki·Id+Kd·(Bi-LB), 通过两个电机的差速控制实现转弯或调整, 其中KP为比例系数,Ki为积分系数,Kd为微分系数,Bi为变差,Id为累积偏差,LB为上次偏差.
红外循迹过程采用路径搜索算法,根据模拟量对盲线位置进行定位.由于不同环境下接收信号的传感器不同,循迹前须标定激光管,定义传感器对盲线的敏感度.红外循迹系统由左、中、右3个激光管组成,选用差比和计算方法,存储循迹过程中每个激光管输出的最大值和最小值,最大值减去最小值得到传感器在盲道上的输出范围,每个激光管的输出信号减去最小值后除以输出范围即可得到其相对输出值,输出值最大时盲线比例最大,根据3个激光管的输出值可计算盲线的准确位置P=Pj·Wj+Pj+1·Wj+1+Pj-1·Wj-1, 其中Pj为所占盲线百分比,Wj为传感器所在位置,j为激光管序号.结合初始值X, 得到盲线偏移量ΔX, 采用增量式PID速度控制算法调整速度, 控制位移, 确保导盲手杖处于盲线中间位置.行进过程中遇到交通灯时,颜色识别模块开启, 当检测到交通灯为绿色时, 检测信号经控制器传给电机驱动模块及语音播报系统,提示前进;当检测到交通灯为红色、黄色或黑色时,判断不能前进,驱停电机,重复交通灯检测动作.
摔倒检测过程中, STM32单片机每隔10 ms读取一次陀螺仪数据,对原始数据进行四元数解计算欧拉角[12], 判断是否摔倒.摔倒检测系统通过陀螺仪MPU6050读取三轴角速度值和三轴加速度值,分析Z轴的加速度和角速度,加速度满量程范围为±2g, 其中g为重力加速度.当Z轴的加速度达到±0.5g, 偏转角速度达到±0.5π rad·s-1时, 启动语音模块询问是否摔倒, 若回答:“是”, 则立即驱停电机, 并询问是否上传坐标信息,否则重复计算角速度变化等检测动作.
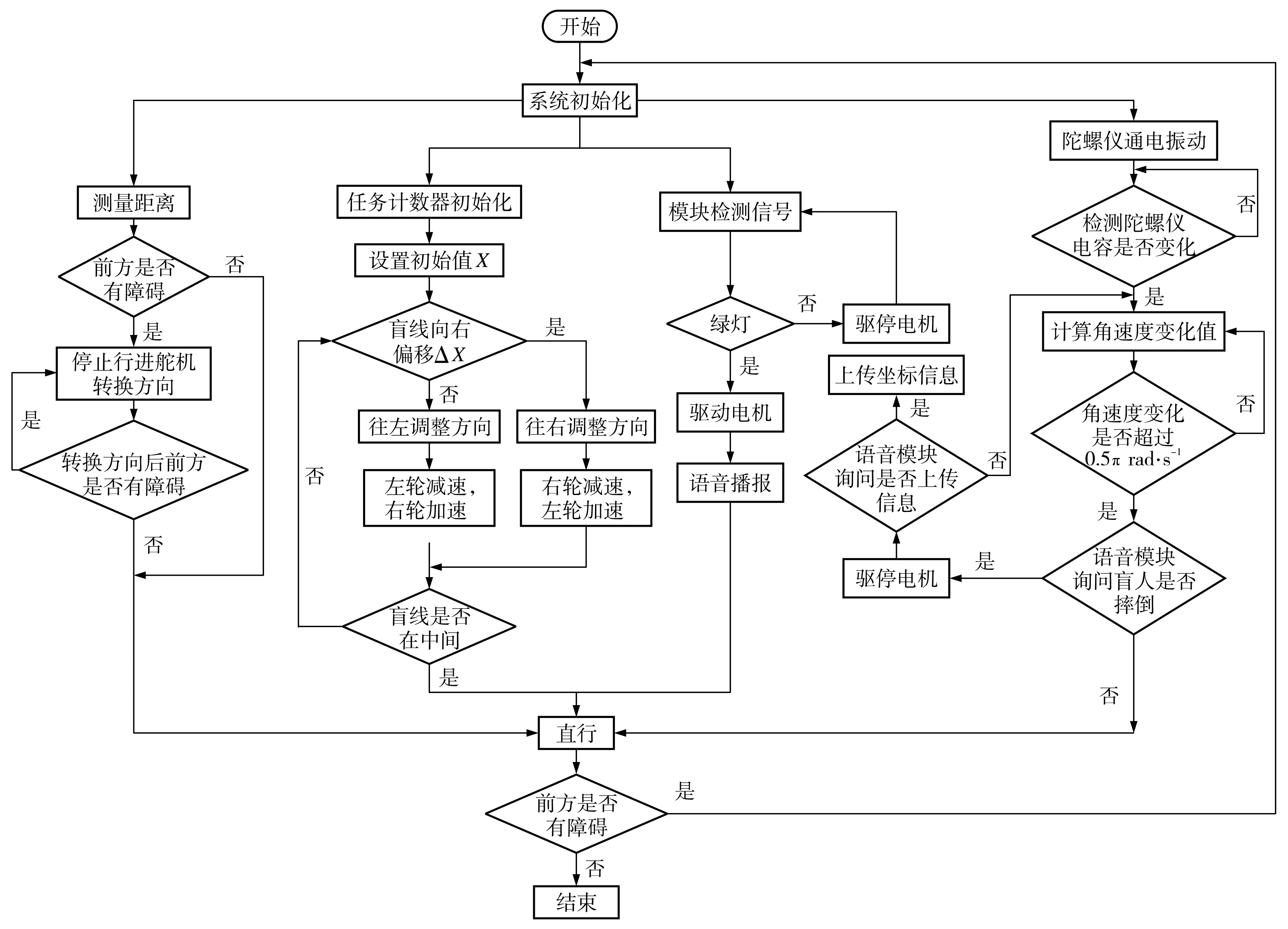
图3 智能导盲手杖系统主程序流程图

图4 智能导盲手杖现场测试场景
4 试验结果与分析
为初步试验智能导盲手杖在小范围内的超声避障、红外循迹、摔倒检测语音交互、导航与定位效果, 在完成整个系统的设计后进行了相关测试.图4为智能导盲手杖现场测试场景.选择一条直线盲道作为测试路线,路途设置静止障碍物, 定义试验者初始位置到障碍物的距离为起始距离, 实际停止位置与障碍物之间的距离为终止距离.通过采集轨迹信号, 指引试验者沿盲道行走,设定不同行走速度,在起始距离150~600 cm之间每隔25 cm进行避障和循迹测试.测试过程试验者完成前摔、横摔、后摔等不同姿势的摔倒行为和蹲起、坐起、行走、跳跃等4种其他行为,进行摔倒检测及语音交互功能测试.导航与定位功能测试在校园内指定位置进行, 参照GPS NMEA-0183标准, 设置定位误差范围为1.54~330 m.

表1 智能导盲手杖试验测试结果
表1为智能导盲手杖各项功能的测试结果.由表1可知, 避障和循迹测试共进行360次试验, 避障成功率约为97.0%, 循迹成功率约为97.4%,当障碍物距离较远时, 试验者均成功避障,障碍物相对较近时,行走速度偏快会影响避障效果;摔倒检测和语音交互功能测试共进行160次试验,摔倒检测成功率约为86.9%, 语音交互成功率约为94.0%;导航与定位系统测试共进行89次试验,导航与定位检测准确率为98.9%.
5 结论
本文设计了一种基于STM32-F103ZET6微控制器的智能导盲手杖,改进了普通手杖的底部结构,提高了手杖与盲道的吻合度, 同时集成了超声避障、红外寻迹、导航与定位、摔倒检测和语音交互等功能,并取得了较好的初步测试效果,可为盲障人士出行提供更多便捷.
猜你喜欢
玩具世界(2022年3期)2022-09-20 01:45:56
湘潭大学自然科学学报(2022年2期)2022-07-28 05:26:46
客联(2022年3期)2022-05-31 04:28:08
测控技术(2018年10期)2018-11-25 09:35:52
电子测试(2018年15期)2018-09-26 06:01:14
科学大观园(2018年2期)2018-05-30 14:47:58
电子制作(2017年1期)2017-05-17 03:54:20
饮食保健(2016年22期)2016-12-09 08:01:46
电子制作(2016年11期)2016-11-07 08:43:49
小雪花·成长指南(2015年8期)2015-08-11 23:56:40