
小天体在轨渲染观测技术
2022-01-24 04:50刘兴潭张成渝武延鹏华宝成吴奋陟
光学精密工程 2021年12期
刘兴潭,张成渝,武延鹏,华宝成,吴奋陟
(中国空间技术研究院 北京控制工程研究所,北京 100190)
1 引言
在我国行星探测重大工程中,小天体探测任务是一大标志性项目。在飞抵小天体前,控制系统需要生成目标的三维数字地形模型(Digital Terrain Model,DTM),从而为交会、下降、附着和取样过程中的高精度和高自主相对自主导航与控制需求服务,进一步提供测定轨道参数、自转参数、目标形状和热辐射等基础数据。由于小行星探测难度大,需要在地面预先模拟小天体的表面特性,确保地面验证充分。因此,开展小天体光学观测图像集的仿真研究,生成包含特定时刻下特定位姿角度与光照信息的目标图像,可作为验证DTM 模型重建算法精度的数据源。
针对空间光场中的非合作目标,本文选择小天体为研究对象,搭建图像渲染观测平台(Image Rendering Observation Technology,IROT),用于生成在轨渲染光学图像集。该图像集能够灵活提供目标在观测时刻的位姿序列、光照角度和相机特性等参数,符合实际仪器成像特点,同时实现了对不同参量的控制。相比于目前已发布的天体图像仿真软件,本文在生成任意位置方向上相机所拍摄图像的基础上,还针对以下内容进行了定制开发:(1)支持基于物理的射线追踪渲染方式,还原度高,真实性强;(2)可加入在轨任务的星历数据(SPICE 位姿数据),辅助任务规划与地面演练;(3)可通过多种光电转换关系,适配选用的仪器镜头成像规律。
本文提出的小天体在轨IROT 在定性与定量角度均符合实测任务图像的要求,能够为小天体探测在轨任务规划提供地面模拟构建小天体地形模型与重建的闭环分析辅助,平台操作灵活,适配性高。
2 地外天体图像仿真研究现状
在目前的地外天体图像仿真研究领域,英国邓迪大学在欧洲航天局(European Space Agen⁃cy,ESA)的支持下开发了一款行星、小天体自然环境仿真软件——行星和小天体自然场景生成实用程序(Planet and Asteroid Natural scene Gen⁃eration Utility,PANGU)[1]。PANGU 利用真实和合成的数据来渲染图像诸如火星、月球、水星和小天体等行星表面,可使用开环或者闭环方式对已生成的场景、相机、时间和物体模型等进行控制,生成相机、激光雷达和雷达图像来支持行星着陆、表面漫游和轨道交会对接操作的离线和闭环高真实度模拟仿真。但是PANGU 的初始DTM 需要从测距敏感器,如美国国家航空航天局(NASA)的火星轨道器激光高度计或ESA 的高分辨率立体相机等中获取。
德国宇航中心(DLR)开发的月球表面光照模拟框架(Moon Surface Illumination Simulation Framework,MSISF)[2],在高精度的月球地形数据基础上,使用了三维建模技术来创建具有大量陨石坑的人造天体表面,随后由视觉光线追踪器,即光线跟踪程序(Persistence of Vision Ray Tracer,POV-Ray)进行光照的模拟。这个过程中,需要使用绕月球轨道运行的虚拟观测相机,结合设定的观测位置、姿态和时间,完成光线追踪并导出图像,但是模拟结果不完全符合实际仪器镜头的成像规律。
国内相关领域的研究多集中于计算直接光照与间接光照并获得全局光照效果的技术方面,并在游戏开发,电影动画及特效中融入图形渲染的技巧,形成了各种完整的光照解决方案[3],但少见于地外天体的模拟在轨观测渲染研究中。
3 小天体图像渲染观测技术
针对空间光场中小天体在轨序列图像渲染的观测需求,本文对仿真中所运用到的三维数据模型、基于光线追踪的物理渲染模型(Physically Based Rendering Toolkit,PBRT)[4]、双向反射分布函数(Bidirectional Reflectance Distribution Function,BRDF)文件、航天器行星仪器转阵事件(Spacecraft Planet Instrument C-matrix Events,SPICE)、渲染仿真工具箱(RenderTool⁃box)涉及的渲染观测技术以及归一化光谱响应与灰度响应转化进行了全流程平台搭建,旨在从任意位置角度模拟在轨光学敏感探测器所拍摄的小天体图像,为后续小天体地表的三维重建提供离线闭环渲染环境。
3.1 仿真流程概述
IROT 结合了目标形状信息、几何位置数据与光学反射模型。图1 所示为小天体渲染图像仿真流程。其主要步骤如下:

图1 小天体渲染图像仿真流程Fig.1 Asteroid monocular image set simulation process
第一步,将朗伯地表反射特性[5]配置为BRDF 文件,用Blender[6]导入并处理NASA 公开的小天体三维数据模型,并以NASA 提供的公开位姿数据SPICE 的关键文件,作为包括几何数据、目标形状与反射特性的特性输入。
第二步,将小天体的FITS(Flexible Image Transport System)格式文件和拍摄时刻的场景信息读入后,通过预先在Ubuntu16.05 环境下配置的RenderToolbox4[7]工具箱进行仿真,从而获取小天体的位置坐标、太阳的光照角度以及相机的位置参数。
第三步,通过基于物理渲染的开源引擎PBRT 渲染器,得到小天体的光谱响应结果。
第四步,计算归一化光谱响应与灰度响应转化系数,将结果写入仿真环境参数,输出与实际探测任务位姿信息一致的小天体仿真光学图像,即符合真实小天体观测仪器成像的图像。
3.2 Blender 生成三维数据模型
Blender 是一款开源的跨平台三维模型编辑软件,支持多种第三方渲染器。本文利用Blend⁃er 对三维小天体点云模型进行预先光照渲染的功能,生成光线追迹状态下的初始图像。
将隼鸟一号(Hayabusa-1)[8]任务获取的糸川小行星(Itokawa)的三维模型[9]导入Blender,设定着色方式,包含纹理、阴影、次表面散射与光线追踪,并在日光模式下渲染高光与漫射效果,作为初始三维模型输入文件。
3.3 BRDF 文件生成
BRDF 能够表示物体表面的反射,即反射方向上的辐射亮度增量与入射方向辐射照度增量的比率。由于BRDF 遵循物理定律,因此使用BRDF 模型计算光与表面交互的渲染技术也称为基于物理的渲染。通过基于物理规则的光与物质交互的规律来计算光照,可以得到和光学敏感器拍摄影像一样写实的渲染效果。图2 为针对地表反射特性模型生成PBRT 渲染的BRDF 文件过程。其中,朗伯模型实现了对小天体表面光度学辐射特性的仿真,其波长λ∈(400 nm,1 100 nm)。为准确模拟目标特性,使用任务实测太阳光谱光源数据与糸川实测光谱反射率数据[10],生成多谱段成像相机(AMICA)对应的BRDF 文件。

图2 生成BRDF 文件的过程Fig.2 Flow chart for generating BRDF files
3.4 SPICE 数据解算
导航辅助信息设施(Navigation Assistant In⁃formation Facility,NAIF)在美国宇航局空间科学办公室的指导下,建立了一个名为SPICE 的数据系统[11],以协助科学家规划和解释天基仪器的科学观测。
SPICE 的主要目标是提供用于规划空间科学任务的几何和其他辅助信息,随后恢复任务执行完毕后返回的科学仪器数据,包括将各个仪器数据集与其他仪器的数据相关联。SPICE 数据提供了仿真所需的航天器星历、小天体星历、航天器时钟以及光学成像敏感器的安装对准及观测时刻小天体、探测器和太阳准确的位置信息。
3.5 空间光场渲染
空间光场渲染采用RenderToolbox 实现平台的场景搭建,Render Toolbox 是由宾夕法尼亚大学(University of Pennsylvania)基于Radiance 和PBRT 引擎开发的工具箱。通过Blender 与Ren⁃derToolbox 联合仿真可获取携带位姿序列、光照角度和相机特性等参数的单目序列图像,从而进一步对观测图像进行建模实验。图3 为空间光场观测平台的搭建过程。其中,在Ubuntu 环境中需要预设的依赖项包括:用来读取和写入3D 场景文件的Assimp,用来读取多光谱图像文件的OpenEXR,用来分发预构建的渲染器和其他工具的Docker,以及用来获取工具箱功能的Tool⁃boxToolbox。

图3 Render Toolbox 配置过程Fig.3 Render Toolbox configuration process
3.6 归一化光谱响应与灰度响应快速转化
首先,在获取目标仿真图像前,需要将图像的归一化光谱响应转化为灰度响应。由于不同观测仪器对波长的响应不同,通过式(1)计算可得到仪器响应的流量谱[12]。

式中:Mc是光谱响应,f(λ)是光谱辐照度流量抵达观测仪器时的分布函数,T(λ)QE(λ) 是光学成像仪器的归一化光谱响应,C1是定标常数[13]。
表1 为拟合时采用的AMICA 相机波长与光谱流量f(λ)的相关数据,其二维关系如图4所示。

图4 AMICA 相机波长与光谱流量的关系Fig.4 Relationship between AMICA camera wavelength and spectral flow

表1 仿真采用的AMICA 波长与光谱流量数据Tab.1 AMICA wavelength and spectral flow data used in simulation
然后,通过拟合流量函数f(λ)与光谱响应函数T(λ)QE(λ),并对λ∈(510 nm,600 nm)积分,积分结果记为Mi。但依靠传统的积分算法单次求解耗时5 165.62 s,周期过长,不能满足后续地面模拟实验与在轨测量任务的快速解算需求,需要提升计算效率。
因此,本文综合光谱与灰度响应输入参数和算法精度的需求,提出了一种计算小天体在轨渲染图像归一化光谱与灰度响应的快速近似转化方法,即将积分过程转化为求和的方式,并通过迭代实验进行了验证。通过替换不同工况的输入参数,在多次求解后归纳出积分结果Mi与求和结果Ms之间的关系为:

其中u=9.709 986。同时,两种求解方法的响应值精度一致。
因此通过简化积分函数,可以将积分过程转化为求和过程,计算得到:

在仿真环节,本文利用式(2)将归一化光谱响应转化为灰度响应的解算过程进行简化,通过对流量函数f(λ)和光谱响应函数T(λ)QE(λ)在λ∈(510 nm,600 nm)区间内进行求和,得到实际响应值Mi。实验表明,改进后的求和算法仅需3.48 s 即可完成图像解算,解算时间大幅缩短。
4 图像仿真功能验证
参考小天体25143Itokawa 的相关参数,设定仿真相机的图像分辨率为1 024×1 024 像素,视场为5.83°×5.83°。以2005年9月30日14:31:22时,隼鸟一号AMICA 相机可见光波段所观测的图像ST_2421019509_V 时的相关参数为例(见表2),单次曝光时间为0.087 s。

表2 ST_2421019509_V 成像外部参数Tab.2 ST_2421019509_V imaging external parameters
首先,读入糸川小天体的三维场景文件Ito⁃kawa_amica_static_V1.blend 和目标时刻下图像对应的st_2421019509_v.fit 文件。然后,采用PBRT 渲染模式,通过spice kernel 读入预先留存的糸川小天体itokawa_kernel.tm 文件,解算出对应时刻下的相机与太阳位置信息。图5为渲染图像观测的st_2421019509_v仿真过程中的相机与太阳位置。其中,SunTarget=[0,0,0];SunPosition=[18 133 370.618 960,-160 914 730.557 823,4 752 091.848 854 ] ;cameraPosition=[-0.371 736,-7.506 404,0.010 927];camera⁃Target=[-0.002 750,-0.155 930,0.003 904];cameraUp=[0.994789,-0.049852,0.088 939]。

图5 渲染观测图像st_2421019509_vFig.5 Rendered observation image st_2421019509_v
利用归一化光谱响应与灰度响应的转化关系,计算仿真图像的灰度值,输出结果如图6 所示。可以看出,基于朗伯地表反射特性模型仿真生成的图像,相较于实测任务图像,在地形轮廓与细节方面均呈现较为一致的状态,符合实拍图像标准,这在后续重建过程中是有利的。

图6 本文仿真结果与AMICA 实拍图像Fig.6 Simulation result and AMICA real shot image
5 仿真图像真实度检验
5.1 仿真真实度评价指标
(1)标准差(Standard Deviation,SD)是方差的算术平方根,反映了数据集的离散程度,即有:

(2)均方根误差(Root Mean Squared Error,RMSE)是指参数估计与参数真值之差平方的期望值的算术平方根。它等同于图像质量评估中的中间评估指标,在许多评估指标中均使用了均方根误差。均方根误差主要是评估数据的变化程度。RMSE值越小,模型精确度越高,其基本公式为:

5.2 仿真真实度检验结果
仿真图像的真实度检验分为定性与定量两个方面。
首先是定性检验。在图6(a)与6(b)中,由目视判别可知基于朗伯地表反射特性模型的小天体渲染图像仿真出的图像与隼鸟一号任务中的实拍图像效果接近,且图像高低起伏部分的对比度高,地表细节仿真情况良好,为后期重建能够提供准确的数据源。
其次是定量角度的检验。图7(a)所示为st_2421019509_v图像的实值图像与仿真图像的灰度差,X,Y坐标分别为对应像素位置,均为0~1 023。图7(b)为对应图像的灰度差值统计直方图,为直观显示灰度差,统计过程中省略了灰度为0 的区域。由统计结果可知,灰度均值Mean=22.498 2,中位数Median=14,标准差SD=9.129 4,均方根误差RMSE=0.101 4。因此仿真图像与任务实拍图像效果接近,满足需求。
5.3 小天体地形建模实验
使用在轨序列图像渲染观测平台搭建技术,能够灵活实现不同工况下从三维模型到二维序列图像的转换,进一步还可获取相应图像的位姿序列、光照角度、相机参数和与实际探测任务位姿信息一致的小天体仿真光学图像集,如图8 所示。然后,利用渲染的光学图像集进行基于几何立体法的三维模型重建,可得到小天体的全球地形模型。
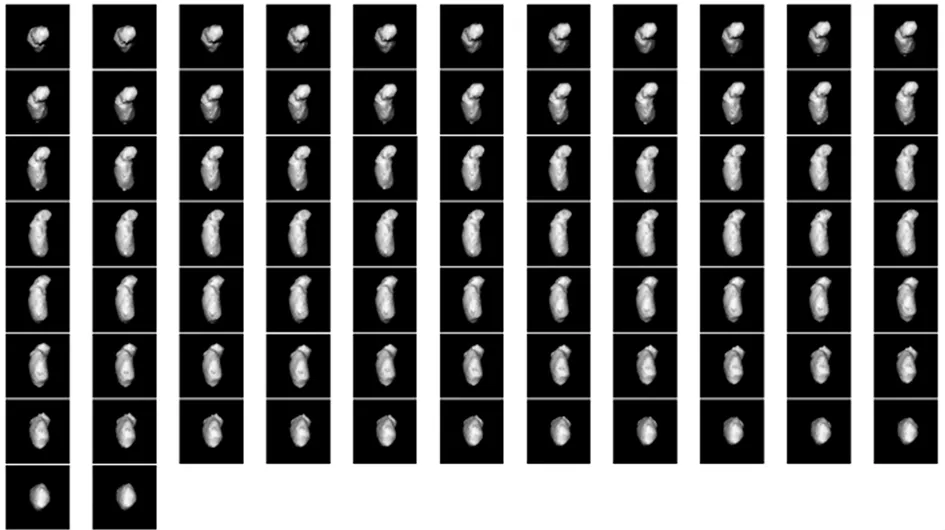
图8 观测序列仿真结果Fig.8 Observation sequence simulation results
本文的小天体DTM 从光学图像集直接生成。通过单一视角图像结合其他已知信息推算目标三维结构的方法称为单目视觉法[14],只需布置一台角度合适的相机即可重建待测目标的三维模型。此处针对所获取的小天体仿真图像集,采用全局基于运动重建结构(Global SfM)法[15]对场景进行稀疏重建。进一步,得到小天体纹理渲染后的3D 模型。
为了检验精度,对比Gaskell 通过多谱段成像相机绕飞期间所拍摄的小行星高分辨率光学图像重构的高精度三维模型,完成地形投影误差的评价。
以联合仿真观测影像集中的图像st_2420945783_v 为例,将Gaskell 实值模型与本文生成的三维模型在观测时间、观测位姿和光照信息相同的情况下,对应生成的二维仿真观测图像,采用多强度模式完成地形投影配准匹配,结果如图9 所示(彩图见期刊电子版)。其中,绿色部分为本文重建模型的地形投影,紫色部分为与真值模型的二维投影相匹配后的结果,未重合区域保留绿色。其转换矩阵为:

图9 地形投影配准结果Fig.9 Terrain projection registration results

参考式(4)和式(5),对地形匹配灰度误差值进行统计,结果如表3 所示。其中,在重建模型的仿真二维地形图中,图像灰度值配准的平均RMSE 为0.178 5,糸川小天体的全球表面地形[16]海拔约在-21~69 m,高差约为90 m,采用等比例换算对应约为小天体地表0.062 8 m 的海拔高差,表明采用本文方法的仿真序列图像进行三维重建的模型精度较高,可以满足未来深空探测小天体地表重建厘米级的精度需求。
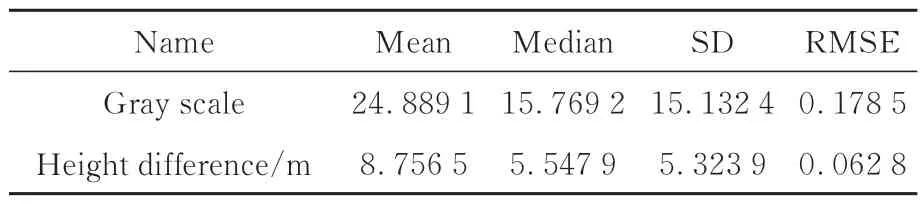
表3 地形匹配灰度误差指标统计结果Tab.3 Index statistics of terrain matching gray error
小天体地形建模实验结果表明,本文的图像仿真方法可以有效运用到小天体地形模型的实际建模工作中。
6 结论
本文提出了一种空间光场中小天体在轨渲染观测平台搭建技术,对所运用到的模型文件生成、光谱与灰度响应转化方法进行了阐述。通过基于物理模型的PBRT 渲染器,输出与实际探测任务位姿信息一致的小天体光学图像集。最后,对小天体渲染图像集进行了真实度检验与地形模型建模实验验证。在三维模型重建实验中,计算渲染图像灰度值与原始在轨数据匹配达0.178 5,即小天体地表0.062 8 m 的海拔高差。IROT 生成图像与实测任务图像的一致性良好,具备高还原度、强真实性的渲染模式,能结合实际控制系统规划在轨任务的星历数据,辅助任务规划与地面演练,还可通过多种光电转换关系,适配选用仪器镜头的成像规律。未来还可融合导航算法进一步闭环验证平台的模拟在轨表现能力。
综上所述,IROT 具有以下优势:能够灵活的提供目标天体在观测时刻的包含位姿序列、光照角度、相机特性等参数的序列图像;可对不同参量实现变量控制,从而方便分析归纳影响重建的内部与外部因素;支持在后期重建过程中引入外部变量,从而有利于深入解算地形模型;通过融合光谱响应与积分转换关系的仿真方法,针对不同反射率的小天体,可根据实测结果制定仿真光学反射模型;提出了一种小天体在轨渲染图像归一化光谱与灰度响应的快速转化方法,在精度不变的情况下,解算时间缩短至秒级。
猜你喜欢
北京航空航天大学学报(2022年7期)2022-08-06
中国机械工程(2022年8期)2022-05-09
中国机械工程(2021年8期)2021-05-07
太空探索(2020年10期)2020-10-22
百科探秘·航空航天(2019年4期)2019-06-11
百科探秘·航空航天(2019年5期)2019-06-06
音乐教育与创作(2019年8期)2019-05-16
光学精密工程(2016年5期)2016-11-07
光学精密工程(2016年4期)2016-11-07
湖北工业大学学报(2016年5期)2016-02-27
