
远海远域移动平台条件下GNSS卫星授时性能评估
2022-01-24 15:13:46朱恩慧王治平李国俊
全球定位系统 2021年6期
朱恩慧,王治平,李国俊
( 北京卫星导航中心, 北京 100094 )
0 引 言
授时是指确定、保持某种时间尺度,并通过一定方式将代表这种尺度的时间信息传送给使用者的一系列工作[1].
卫星授时一般是通过卫星发射无线电信号将标准时间广播出去,用户即可通过卫星接收机接收到标准时间. 卫星授时属于广域高精度的授时方式,动态用户也可以使用[2]. 在远海远域,移动平台需要搭载着大量电子信息设备开展相关业务,各型设备之间协同作业对时间同步的需求日益凸显,高精度授时在保障移动平台的信息通信、导航定位、工程操控等方面具有精度高、成本低等特点,拥有广阔的发展前景[3-4].
信息通信方面. 精确的时间本身作为一种信息是其他各项业务活动正常开展的重要基础之一,尤其是在高纬度远海远域地区,在无其他通信手段的条件下,信息通信只能依靠在高纬度运行的卫星实现. 因此,只有精确的卫星授时信息才能保证移动平台同外界建立正常有效地通信联络.
导航定位方面. 移动平台在远海远域航行安全的基础性条件就是精准可靠的位置、速度及方向服务.目前,移动平台主要依靠卫星导航与电子海图相结合的方式进行导航定位[5]. 其中卫星导航系统如要具备精度高、实时性、独立性强的优势,必须由卫星导航系统的时间分系统提供准确且统一的时间基准. 随着卫星授时技术的发展应用,现有全球卫星导航系统(GNSS)的授时性能已达到几十纳秒量级,基本满足大型移动目标的导航定位服务,但在小型目标的搜索、施救等方面还存在一定精度差距.
工程操作方面. 在远海远域的工程项目中,例如石油天然气采集开发、隧道桥梁建设等重大工程均需要高精度的时间信息服务. 由理论分析可知,授时偏差1 ns,会导致定位偏差30 m. 目前利用GNSS卫星向远海远洋的移动平台进行授时,可以获得纳秒级的授时信息,并通过移动平台自身的网络时间协议(NTP)授时网络向各个子业务系统进行二级授时,可基本满足一定的工程需求,但仍有巨大的进步空间.
目前,卫星导航系统可通过伪距测量,使用广播电文(含广播星历、广播星钟等)[6-7]来实现标准单点定位(SPP)和授时[8-9]. 卫星搭载高精度原子钟,用户通过卫星发播的导航电文获得卫星星历、钟差等数据,并结合伪距观测值和时延修正值计算当前移动平台时间与卫星系统时间的差值,进而获得精确的时间. 早期移动平台试验大多基于内陆区域的监测站进行分析评估,为了进一步满足各类场景下获取更精确时间信息的需求,探索远海远域条件下GNSS卫星的授时性能,本文通过在远海远域移动平台搭载时频设备,开展实地GNSS卫星授时测试,积累了大量原始数据,验证了在北半球远海远域的授时性能,具备一定的开拓性与借鉴性.
1 GNSS卫星授时技术
卫星授时技术主要分为三类,第一类是基于通信卫星的授时技术,主要包括转发式授时技术和数字卫星电视授时技术;第二类是卫星导航系统的授时技术[10-11],主要包括GNSS卫星授时技术、GNSS精密单点定位(PPP)授时技术[12-13]、基于共视(CV)原理的卫星授时技术和基于卫星导航系统的精密授时技术;第三类是国际计量局(BIPM)用于国际时间比对的高精度时间传递技术,主要包括共视时间频率传递技术和双向卫星时间频率传递(TWSTFT)技术[14-15].
其中,GNSS卫星授时服务方式主要分为两类,第一类为卫星无线电导航业务(RNSS)授时服务,简称RNSS单向授时;第二类为卫星无线电测定业务(RDSS)授时服务,简称RDSS授时. 其中RNSS单向授时体制是由用户端接收卫星无线电信号,自主完成时差计算.目前国际四大全球导航卫星系统GPS/GLONASS/Galileo/北斗卫星导航系统(BDS)均具备RNSS单向授时功能,另一类RDSS授时方式主要包括RDSS单向授时方式以及RDSS双向授时方式. 其中RDSS单向授时体制是由用户端接收卫星转发的无线电信号,自主完成时差计算. RDSS双向授时为授权服务,授时无法由用户终端独立完成,需要RDSS地面控制中心配合进行时延和时差的计算,目前我国的BDS具备RDSS双向授时的服务功能[16]. 本文重点开展RNSS单向授时在远海远域移动平台条件下的授时性能.
1.1 RNSS单向授时原理
RNSS单向授时包括自主定位和位置保持两种模式,由于本次实验是在移动平台条件下开展的,因此应当采用自主定位的授时模式. 在该模式下,GNSS导航卫星将包含整周计数、周内秒计数、卫星钟与地面控制中心时钟差参数、地面控制时间与协调世界时(UTC)时间同步参数信息的时间信息扩频调制后发播,经由空间传播到达用户终端. 用户接收端接收不少于4颗卫星的信号,经过调制、解调与计算处理获得用户位置、速度和时间信息[17-18]. 地面控制中心时间与用户的钟面时间,两者存在钟差 Δt.RNSS单向授时自主解算出本地时间和GNSS系统时间之差 Δtu,并根据GNSS时间和UTC时间差值ΔtUTC,修正本地时间使本地时间与UTC同步,授时模型与计算关系如式(1)所示:


式中:用户终端得到的本地时间与UTC时间差值为Δt; τdelay表示星地伪距(时延量),由用户端测量获得;τdown为GNSS卫星到用户终端的空间几何传播时延;τother为其他附加时延,包括空间段、用户段与控制段时延等; ΔtUTC为GNSS时间和UTC时间之差[5].图1为RNSS单向授时测量图.

图1 RNSS单向授时测量图示
1.2 RNSS单向授时精度
RNSS单向授时精度与用户等效距离误差(UERE)紧密相关. 用户等效距离误差由系统的空间段、控制段和用户段的误差分量组成. 其中空间段误差包含卫星钟误差、卫星星历误差、电离层时延改正误差以及对流层时延改正误差;控制段误差包含测控设备时延标定精度与UTC模型改正误差;用户段误差包含多路径误差、接收机误差. 各类误差并不相关,可视为独立变量,这些误差分量取平方和的平方根得到UERE.

以GPS为例,用户等效距离误差对授时的影响如表1所示.

表1 各项误差对RNSS单向授时的影响
2 验证试验方案
本次验证测试搭载移动平台总计航程1.2万余海里,历时76天,在66°N以上区域内开展任务44天.本次验证试验在移动平台上安装GNSS卫星接收机与1台铯原子钟. 铯原子钟为卫星接收机提供秒脉冲(1 PPS)与10 MHz输入参考信号,卫星接收机接收GNSS卫星发播的导航电文,经自带RxControl软件处理后存储在数据采集及存储设备内,待返港后进行数据后处理. 主要分析远海远域条件下的授时时差、频率准确度以及可见卫星数等指标.
2.1 试验海域
以此次移动平台远海远域航行计划为基础条件,主要验证测试GNSS卫星在北半球重要航道以及北冰洋海域的授时精度情况. 本次试验保持全航程全天时数据采集,试验航线起点位于我国上海,试验范围覆盖121°58′E~152°55′W、31°33′N~86°22′N区域,图2为具体航行路线.
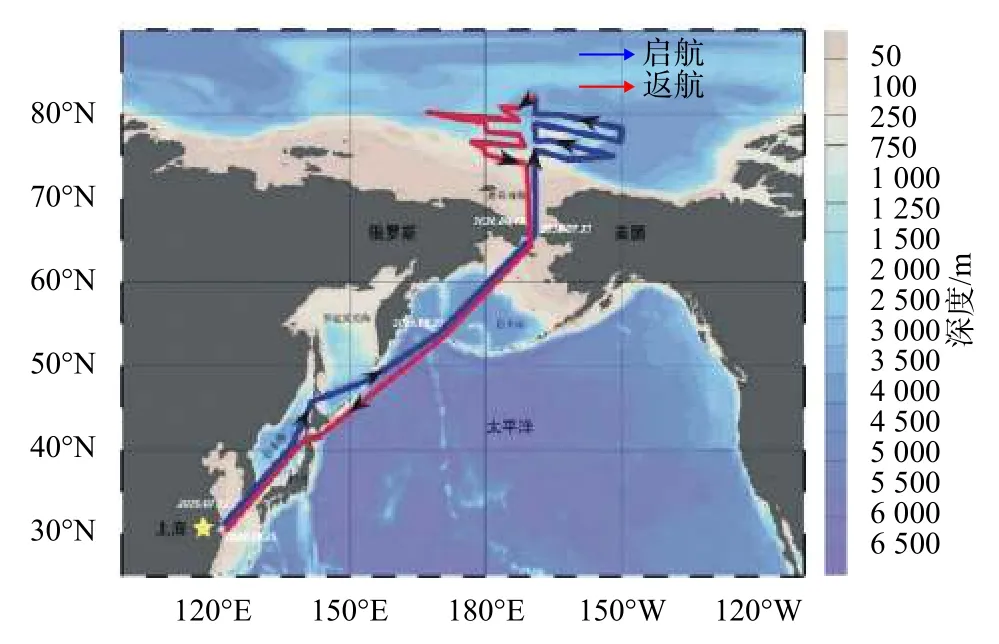
图2 移动平台航行路线
2.2 设备连接与数据采集
本次验证试验选择的设备包括1台Septentrio PolaRx4TR型GNSS卫星接收机、1台TA1000型激光铯原子钟与1台数据采集存储设备.
2.2.1 设备连接
GNSS卫星接收机用于采集卫星授时原始数据,接收机天线为圆锥型天线,底半径20 cm,布设于移动平台驾驶舱顶层甲板右舷固定点位,周围对空视野良好无遮挡. 接收机馈线长60 m,沿移动平台护栏固定.铯原子钟为GNSS卫星接收机提供1 PPS与10 MHz基准信号,接入BNC接口信号传输线,将输出的1 PPS与10 MHz连接至GNSS卫星接收机. 图3为设备连接示意图.

图3 设备连接示意图
2.2.2 数据采集软件设置
利用RxContro软件对GNSS接收机进行配置,在Connection Setup中设置TCP/IP网口模式通过路由器连接接收机与数据采集及存储设备,设置观测模式为GPS+GLONASS+Galileo+BDS模式,卫星观测截止高度角为15°,采样频度为30 s. 在Post Processing选项中设置SBF文件自动转换为CGGTTS文件与Rinex文件,并在Global选项里设置好文件保存路径. 待试验移动平台进入预定航线后即开始连续采集数据.
2.2.3 观测数据处理1)授时时差抖动
使用RxControl软件将得到的SBF文件转换为CGGTTS文件,打开共视数据处理软件,导入CGGTTS文件点击共视计算可以得到GNSS发播的时间与本地铯原子钟保持时间的时差抖动.
2)输出频率准确度
使用sbf2asc软件将数据采集设备里存放的SBF文件经初步处理得到PVTGeodetic模块. 根据rxtools manual手册从该模块中我们可以得到外置铯原子钟的ClockBias信息. 利用Stable32软件进行分析处理后可以得到输出频率的准确度StdDev.
3)可观测卫星数
使用Rxtools中的SBF Analyzer功能,选择sky Plot选项可以得到在测试区域的可观测卫星数. 可观测卫星编号由大写英文首字母与两位阿拉伯数字构成,其中G代表美国GPS卫星,C代表中国BDS卫星,R代表俄罗斯GLONASS卫星,E代表欧洲Galileo卫星,阿拉伯数字为该卫星的PRN号.
3 试验方案与分析评估
2020年7月至9月移动平台在预定航线机动期间,全程开启GNSS卫星接收机接收导航电文,并结合停泊计划在特定区域进行昼夜24 h观测,具体测试分别为航行最北测试点、东西伯利亚海域测试点、北冰洋返航点、白令海测试点、日本海测试点,具体区域中心坐标如表2所示.

表2 测试区域中心点坐标
3.1 授时时差抖动
授时时差抖动测量的是铯原子钟与卫星导航系统时间的时差. 本次验证试验授时时差情况分别是航行最北测试点保持在-10~+14 ns以内;东西伯利亚海域测试点保持在-6~+10 ns;北冰洋返航点保持在-15~+20 ns;白令海测试点保持在-9~+8 ns;日本海测试点保持在-15~+20 ns. 从数值范围角度分析,本次试验选择的5个点位授时时差抖动均保持在±20 ns,与理论值基本一致. 在航行最北测试点由于极昼环境,大气环境良好,因此授时时差较为稳定. 在北冰洋返航点与日本海测试点由于受恶劣环境影响,授时时差抖动相对较差. 表3为具体测试区域时差抖动结果,图4为 测试区域授时时差.

表3 测试区域GNSS系统授时时差抖动 ns
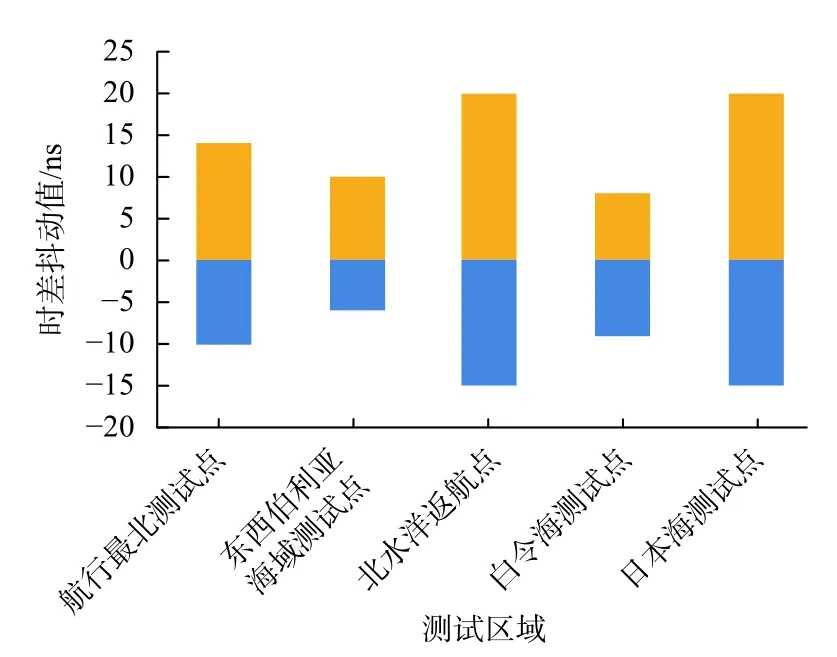
图4 测试区域授时时差
3.2 输出频率准确度
通过对GNSS接收机输出的频率信号进行处理,得到频率准确度. 区域具体测试点输出频率准确度如表4所示. 由表4可知,本次验证试验输出的频率准确度分别为:航行最北测试点可达到5.969×10-14;东西伯利亚海域测试点可达到7.036×10-14;北冰洋返航点可达到1.923×10-13;白令海测试点可达到8.553×10-14;日本海测试点可达到9.233×10-14. 从数值范围角度分析,试验选择的5个区域频率准确度均保持在10-13量级以内,在航行最北测试点、东西伯利亚海域测试点及白令海测试点等高纬度地区甚至可以达到10-14量级,结果略好于预期. 在北冰洋返航点与日本海测试点由于受恶劣环境影响,频率准确度结果相对较差.
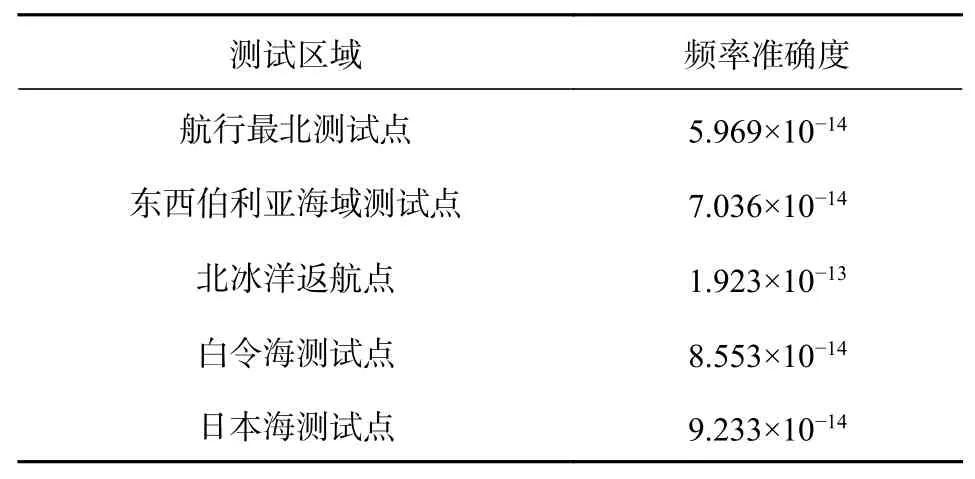
表4 测试区域输出频率准确度
3.3 可观测卫星数
利用RxControl处理软件可以得到5个测量点位观测到的GNSS观测卫星颗数,具体测试区域可观测卫星如表5、图5所示. 由表5、图5可知,具体可观测卫星数量情况分别为:航行最北测试区域平均可观测到GPS卫星10颗、BDS卫星10颗、GLONASS卫星10颗、Galileo卫星8颗;东西伯利亚海域测试区域平均可观测到GPS卫星12颗、BDS卫星10颗、GLONASS卫星10颗、Galileo卫星8颗;北冰洋返航点测试区域平均观测到GPS卫星12颗、BDS卫星12颗、GLONASS卫星9颗、Galileo卫星9颗;白令海测试区域平均观测到GPS卫星12颗、BDS卫星12颗、GLONASS卫星9颗、Galileo卫星8颗;日本海测试区域平均观测到GPS卫星12颗、BDS卫星12颗、GLONASS卫星10颗、Galileo卫星7颗.从观测卫星数量角度分析,本次试验选择的5个区域平均观测数量最多的是GPS卫星,平均可观测卫星数量最少的是Galileo卫星.
4 结束语
在远海远域移动平台条件下,对5个典型测试区域GNSS卫星授时性能进行了分析,得到如下结论:
1)本次试验验证了GNSS卫星导航系统30°N~86°N区域授时时差抖动,结果均保持在±20 ns以内.由于在某些地测试区域大气环境较为良好,时差可保持在±10 ns以内;在遭遇风暴、雨雪等强对流大气环境等恶劣天气的条件下,授时性能显著下降,但可维持在±20 ns以内,仍满足纳秒级用时需求.
2) GNSS卫星导航接收机输出频率信号的准确度整体可达10-14量级,最优可达5.969×10-14,具备一定的自守时能力. 但在环境恶劣条件下,其准确度指标只能维持在10-13量级.
3) GNSS可见卫星观测结果,GPS与BDS平均可观测到的卫星数量均为12颗,GLONASS平均可观测到的卫星数量约为9颗,Galileo平均可观测到的卫星数量约为8颗.
猜你喜欢
机电信息(2023年24期)2023-12-26 10:55:38
军事文摘(2023年18期)2023-11-03 09:45:42
军民两用技术与产品(2022年1期)2022-06-01 06:28:50
上海大学学报(自然科学版)(2020年4期)2020-05-24 07:29:38
测控技术(2018年6期)2018-11-25 09:50:18
电子制作(2018年19期)2018-11-14 02:36:40
测绘科学与工程(2017年1期)2017-05-04 03:40:44
电子制作(2016年1期)2016-11-07 08:42:41
系统工程与电子技术(2016年4期)2016-08-24 07:46:04
太空探索(2016年7期)2016-07-10 12:10:15
