无线充电无人机路径规划和通信资源管控算法
2022-01-24 08:36杜鹏飞付元华张学军
西华大学学报(自然科学版) 2022年1期
杜鹏飞,付元华,张学军,2
(1.西华大学航空航天学院,四川 成都 610039;2.北京航空航天大学电子信息与工程学院,北京 100191)
近年来,无人机(unmanned aerial vehicles,UAVs,) 因其成本低、移动性高和部署灵活性等显著优势而被广泛地应用在无线通信、公共安全和应急救灾等领域[1]。然而,无人机通信仍然面临着一些不可忽视的挑战。一方面,无人机因其小尺寸和低重量要求致使电池容量有限。针对此问题,无线功率传输(wireless power transfer,WPT)技术利用射频信号为无人机提供可控、稳定的电源[2]。另一方面,由于空地无线信道的广播和视距(line-ofsight,LoS)特点导致无人机−地面通信容易被地面非法节点窃听。为此,物理层安全(physical layer security,PLS)技术被认为是实现无线保密通信的一种有前景的技术[3]。因此,如何设计无人机无线充电、路径规划和发射功率控制策略对于提高系统安全信息容量至关重要。
为了向无人机提供稳定和可预测的能量,文献[4−6]将WPT 技术应用到无人机通信系统中。文献[4]基于WPT 技术提出了一种信息和能量同时传输的方案来为无人机提供持续的能量。文献[5]提出了一种可充电无人机的路径规划和资源分配算法来使地面用户的通信容量最大化。文献[6]利用WPT 技术对无人机进行充电,并提出了一种无人机路径规划和资源分配策略来提高系统下行通信容量。然而,文献[4−6]都假设无人机电池容量是无限的,因此这些算法都不能应用于实际的无人机系统。
近年来,文献[7−9]对无人机的路径规划和传输功率控制进行研究以期提高无人机通信系统的安全信息容量。文献[7]通过联合优化无人机的飞行轨迹和发射功率来使系统的平均信息容量最大化。文献[8]在已知部分窃听者位置信息的情况下提出了一种鲁棒无人机飞行轨迹和通信资源分配算法来提高系统平均信息容量。文献[9]通过联合优化无人机的位置和人工噪声的发射功率来提高系统的安全性。然而,文献[7−9]都没有采用WPT 技术来为无人机提供稳定和可预测的能量。
因此,本文通过联合优化无人机的无线充电时间、飞行轨迹和发射功率来探究系统安全信息容量最大化问题。
1 网络模型及问题建立
1.1 系统模型
如图1 所示,本文考虑一种无线供电的无人机通信系统,包括无人机(Alice)、无线充电站、地面目的节点(Bob)和窃听者。假设Alice的飞行周期为Ttotal秒,它等分为T个时隙,则每个时隙为ΔT=Ttotal/T。此外,所有时隙的集合表示为T={1,2,···,T}。

图1 系统模型
Alice 在着陆和起飞时不传输数据,只在空中平行飞行过程中传输数据。本文采用三维直角坐标系统来描述无线充电站、Alice、Bob 和窃听者的位置。无线充电站的位置为qw=(0,0,0),Alice 在时隙t的位置为qa(t)=(xa(t),ya(t),H),Bob的位置为qb=(xb,yb,0),窃听者的位置为qe=(xe,ye,0)。
本文假设Alice 和所有地面用户是LOS 链路,由于无人机的机动性产生的多普勒效应用户可以完全抵消。令hwa(t)为无线充电站与Alice 在时隙t的信道功率增益,令hab(t)为Alice 和Bob 在时隙t的信道功率增益,令hae(t)为Alice 和窃听者在时隙t的信道功率增益,则它们可以表示为

其中:β0为Alice 和地面用户之间的链路的参考信道功率增益,与发射机和接收机的天线增益有关。
1.2 无线能量传输和数据传输模型
Alice 完全由位于地面的无线充电站供电,以使其可持续运行。本文提出了一种两阶段的无线充电和数据传输方案。在每个时隙,Alice 在第一阶段(无线充电阶段)从充电站收集能量,然后利用收集到的能量在第二阶段(数据传输阶段)向Bob传输数据。
在第一阶段,设Pw为无线充电站的发射功率,α(t)为时隙t的无线充电时间,其中0 ≤α(t)≤1。因此,Alice 在时隙t收获的能量为

其中:η为Alice的能量收集电路的能量收集效率。
在第二阶段,Alice 利用收集到的能量将信息传送给Bob。则Bob 在时隙t的数据速率为

其中:Pa(t)为Alice 在时隙t的发射功率;为Bob处的噪声功率。
此外,地面窃听者在时隙t的数据窃听速率为

因此,该无人机通信系统在飞行周期内的安全信息容量为

1.3 问题建立
基于上述系统模型,本文通过联合优化无线充电时间α={α(t)|t∈T},Alice的飞行轨迹Qa={qa(t)|t∈T}和发射功率Pa={Pa(t)|t∈T}来最大化系统总的安全信息容量,可以建模为

问题P1中:是Alice的悬停功耗;Bmax为Alice 可充电电池的最大容量;为Alice的最大发射功率;是Alice的初始和最终位置;Va为Alice 每时隙飞行的最大水平距离;Ds为无线充电站与Alice 之间的最大距离,保证Alice 可以充电。约束C1的左不等式为能量收获因果约束,即第二阶段总能量消耗必须不大于第一阶段总收获能量。约束C1的右不等式表示电池在每个时隙的能量水平受Bmax的限制。约束C2 和C3 是Alice的无线充电持续时间和发送功率的边界。约束C4 表示Alice 每个时隙的最大水平位移。约束C5 表示Alice 到无线充电站的距离不大于Ds。约束C6 是Alice的初始和最终位置。
2 无人机路径规划和资源管控算法
2.1 等价转化
为了应对问题P1目标函数的非光滑性,我们提供了以下引理。
引理1以下问题P2的最优解与问题P1的最优解相同:
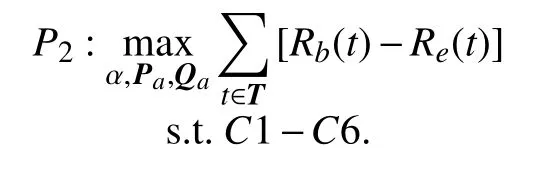
问题P2仍然难以求解,主要是由于多个变量的耦合。为了解决此问题,提出了一种次优迭代优化算法,将问题P2分解成3 个独立的子问题,然后给出每个子问题的最优解。其主要思想是优化一个变量子集,其余变量保持不变,以获得局部最优解。
2.2 问题分解
2.2.1 无线充电优化子问题
给定Alice的发射功率Pa和飞行轨迹的轨迹Qa,可以得到无线充电优化子问题为
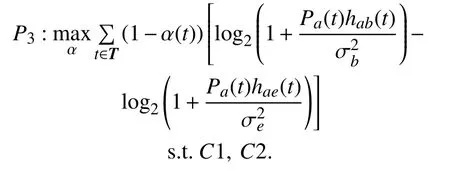
显而易见,问题P3是一个标准的线性规划问题,可以采用单纯形法求解。
2.2.2 无人机功率控制子问题
给定Alice的无线充电时间 α和飞行轨迹的轨迹Qa,可以得到无人机功率控制子问题为

我们利用拉格朗日对偶分解来求解问题P4。
2.2.3 无人机路径规划子问题
给定Alice的无线充电时间 α和发射功率Pa,可以得到无人机路径规划子问题为

我们利用SCP 技术将问题P5转化为凸问题,然后利用Matlab 中的CVX 工具箱进行求解[10]。
2.3 所提算法
本文所提的无线充电无人机路径规划和资源管控算法如下所示。


3 仿真分析
3.1 仿真参数设置
本文主要的仿真参数设置如表1 所示。

表1 仿真参数
3.2 算法性能对比
图2 和图3 分别给出了不同算法的无人机水平方向的飞行轨迹和安全信息容量。从图3 可以看出不同算法的安全信息容量随着无线充电站的发射功率增大而增大。此外,所提算法的安全信息容量明显高于固定轨迹、固定充电时间和固定发射功率的安全信息容量。可见,所提算法通过联合优化无人机无线充电时间、路径规划和发射功率控制可以明显提升系统安全信息容量,从而为无人机的运维管控提供技术支撑。
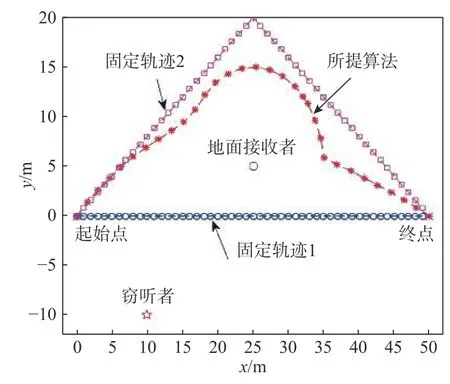
图2 不同算法的无人机水平方向的飞行轨迹
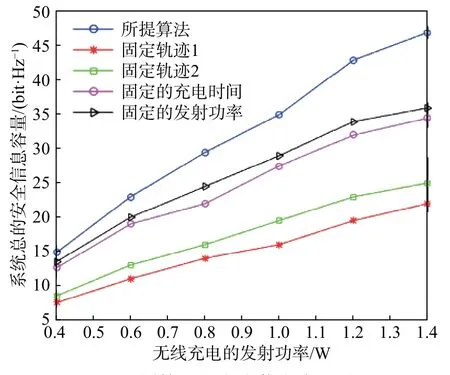
图3 不同算法的安全信息容量对比
4 结束语
本文基于无线能量传输和物理层安全技术提出一种低复杂度的无线充电无人机路径规划和通信资源管控算法,该算法通过联合优化无人机的无线充电时间、飞行轨迹和发射功率来最大化系统安全信息容量。通过仿真结果表明,与传统固定无人机路径、发射功率和充电时间的算法相比,所提算法能明显提高系统安全信息容量。
猜你喜欢
数字技术与应用(2022年7期)2022-08-03
智慧电力(2022年6期)2022-07-04
福建中学数学(2021年1期)2021-02-28
小资CHIC!ELEGANCE(2021年44期)2021-01-11
环球时报(2020-12-08)2020-12-08
科学与技术(2018年23期)2018-06-17
课堂内外(小学版)(2017年3期)2017-04-15
商界评论(2016年12期)2016-12-08
中国新通信(2016年4期)2016-03-24
山东工业技术(2016年5期)2016-03-04