基于改进VSG技术双向充电桩控制策略研究
2022-01-23 15:22曹彦哲张路刘耿博西安麦格米特电气有限公司
环球市场 2021年36期
曹彦哲 张路 刘耿博 西安麦格米特电气有限公司
燃油汽车由于高耗能、高排放等缺点正逐渐被新能源汽车所取代。未来电动汽车的大规模使用,必定对电网造成冲击,影响生活用电质量。电动汽车能够储能,同时也能进行供能,但是传统的控制技术无法保证充放电接口稳定性,对此提出VSG技术,使用该技术对汽车的控制技术进行优化,增加系统的稳定性,保障系统兼顾调压调频,实现有效控制。
一、控制系统整体结构
由于电能汽车既能作为储能单元,同时能够为汽车电源提供分布式供能。当电网低谷状态,电动汽车能够作为其单元消纳电网能量;电网处于峰值阶段,则能够按照分布式供能,保障电网运行。分布式能源与电网之间,需要借助双向变换器进行转换,保证接口的稳定性。传统控制技术多为恒功率控制,当大规模电动汽车同时充电,电网无法维持稳定性,造成电力波动,影响了电网系统的稳定性。针对这一问题,有学者惯性的提出了虚拟同步机控制技术(VSG)。与传统汽车的逆变器控制相比较,VSG操控起来更加简单,同时更有利于建模。为了保证阻尼与惯性作用,并兼容系统的稳定性。本文益处电压型虚拟同步电机控制算法,兼顾电压与频率调节,但是忽略了系统的动态性能。针对于当前大多数的汽车并网背景,提出改进措施。通过VSG技术将变化器模拟成同步电机,并结合模型预测控制算法,对系统电流值进行预测,针对参考电流与预测电流进行优化,提高系统动态响应能力。同时满足阻尼与惯性作用,兼顾调压调频,提高充放电效率[1]。
二、改进VSG技术控制的措施
(一)VSG模型建立
1.调速器设计
系统频率能够稳定运行,是保证系统稳定的关键。其中控制系统中,调速器对于保障系统稳定性发挥了关键作用。调速控制器能够根据功率负荷变化,对功率进行调整,保证系统维持在稳定的频率状态下,实现稳定运行。根据同步电机的有功频率,保证虚拟同步机的调速器得到优化,提高系统运行质量。
2.调压器设计
与有功平衡相似,系统无功功率直接影响到电网运行质量,会造成电压运行不稳定。对此,保证无功平衡对于系统稳定性也起到重要作用。无功平衡在系统中的主要作用,是负责控制电压稳定,与系统产生的无功功率消耗相等,根据模拟同步机获得VSG对于无功电压的控制框如图1所示。
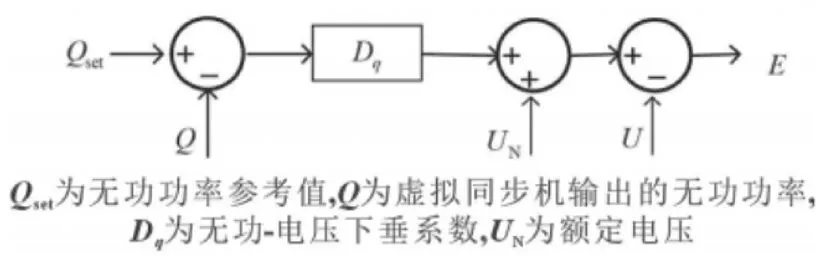
图1 调压器控制结构图
3.虚拟转子设计
根据图1的电路结构图,计算虚拟同步机的转子方程,能够确定转子方程为:
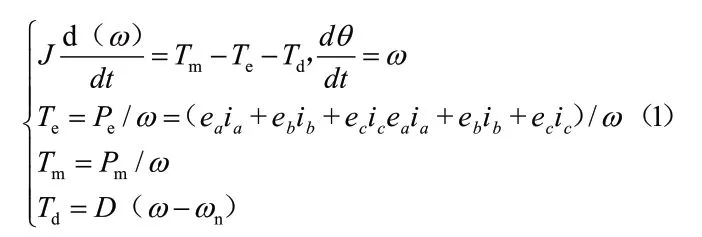
其中公式中的P类参数代表VSG运行产生的机械功率与电磁功率;T类参数代表机械转矩、阻尼转矩等;J为转动惯量;e为电动势;i为输出电流;ω为电网角速度;D为阻尼系数;q为相位角;t则代表时间。根据公式(1)转化出(2),公式如下:
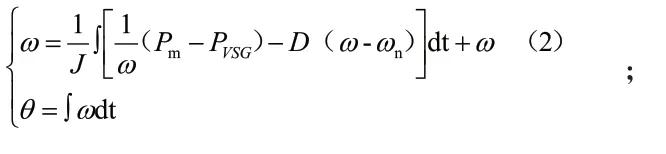
根据公式(2)能够获得虚拟同步机的有功功率指令,主要注意的是此处的阻尼系数与转动惯量,能够保证虚拟阻尼与惯性得以实现,并改善系统实际运行时频率的波动。根据公式计算,能够得到虚拟转子角速度,并知晓转子角速度与功率之间的关系,为电流生成模块提供参考数据。
(二)参考电流生成模块
根据图1所示,基于电路拓扑结构可以建立对应的数学模型,具体公式如下:;公式中的L与R 分别为滤波电感和电阻;ua等代表电网电压,根据模型构建情况,需要保证模型交流侧为时变参数,并变更电流、电压的坐标,实现无静差控制[2]。根据公式(3)获得静止坐标,构建变换器的模型公式:;公式中的原有电动势,在经过变换后成为VDG电动势;电网电压则成为变换后的电压。此时将三相电流进行交换,获取两相旋转坐标电流,根据公式(3)计算的电压参考值,通过控制获得旋转坐标的电流,依据虚拟同步控制与电流参考,能够模拟出电动汽车实际充放电时的参考电流,根据生成的木块,为后续的模型预测控制提供参考数据,提高控制优化质量。
(三)模型预测控制策略
与传统虚拟同步电机相比较,本文利用MPC算法,与VSG结合,对模型电流进行预测和控制,实现滚动优化,提高应用的实时性。
模型预测的目的在于保证参考电流与预测电流,两者存在的差值能够为系统开关选择最佳组合提供参考,因此定义开关的公式为:;由于本次采用三相变换器,拥有三个桥臂,对应不同的开关组合,开关与电压矢量具体关系为:; 根据公式能够获取到不同的电压矢量,同时由于均为零矢量,因此可以判断e0与e7相等。则输出电压矢量变换坐标轴为:
假设系统实际采样周期较小,采用前向差分原理对逆变器模型的微分项进行表述:;将公式(8)代入公式(7)中,能够获得电动汽车充放电电流,形成下一刻预测的模型:;公式中Ts代表采样周期。
根据变换器不同的开关组合状态,能够尝试出多种电压矢量类型。为了保证预测结果与实际结果之间的误差值最小,保证控制质量。根据参考和预测电流差值科学选择电压矢量,将其作为控制信号,并对其价值函数进行设计。基于公式;根据表1得知不同电流的ab轴分量,并且函数g的值越小,控制效果越好。通过建立模型,对VSG进行优化控制,提高电流预测值与参考值的差值,提高系统的系统动态性能。

表1 电流分量
三、仿真分析
基于仿真平台搭建传统VSG与MPC双层控制模型,确保对电动汽车储能系统进行控制。系统整体采用三相电与双向控制系统构成,仿真算法中:ode45,J=1,D=20,Kp=200,K1=200。电池充满情况下电压参数为300V,额定电压200V,具体如表2所示。

表2 电路参数
假设正方向为放电方向,能够发现断路器在0.5s时出现合闸的现象。对此设定1-3s时分别设定参考充放电功率为2、5、10kW,并选择50辆改动的电动汽车进行改进,根据仿真试验,能够发现内部频率处于2-3s之间,功率参数徒增,导致系统开始波动,之后很快恢复到额定频率并与其一致。随着充放电功率在2-3s内增加,能够提升汽车电池的剩余电量SOC值,呈现出先提升后降低的趋势。剩余电量斜率增加,使得充放电速度加快;基于不同规模的电动汽车进行并网连接,能够发现汽车数量与电网频率波动成正比,数量越多频率波动越大;VSG输出电压与电网的差值,能够在控制器的实际控制下避免并网造成的冲击,实现快速减小差值,使电动汽车通过充电桩顺利接入电网[3]。
根据两种情况优化系统,对其调频能力进行仿真试验。首先设置电网频率为50/Hz,保持初始电压为基准电压(1.02);另一种则是设置电动汽车剩余电量在80%,汽车数量为25。能够发现电网处于第一种情况,电压高于额定电压,2-3s是其频率攀升到稳定的过程。在这一过程中,电动汽车能够始终处于充电的状态,并自动与电网连接吸收存储电能,提高电池的电量;当电网处于第二种情况,能够发现电压小于额定电压。2-3s是其频率降低到稳定的过程,在这一过程中,电动汽车始终处于放电状态,并为电网提供电能,保障电网频率的稳定性,汽车的电池电量随之减少。电压与输出电压差值在到达0.5s时出现变化,经过合闸减小到零。本文提到的方法,能够根据电网运行的实际情况,对电网频率作出调整,有效缓解系统造成的波动影响。
对此基于同样情境对传统VSG进行仿真,结合算法对充电产生的频率波形进行对比。经过对VSG优化,能够显著提高系统的响应速度,保持稳定的运行状态。并且在1-3s内,随着功率增加,频率波动随之增加。验证了改进后的VSG算法造成的系统波动,明显小于传统VSG算法。
分别采用两种算法,对充电时的电流对网侧电流谐波进行分析,能够发现传统算法占据优化VSG电流一半,也说明了改进后的VSG方法,能够有效对汽车充电时的谐波进行控制,提高电网的供电质量。根据仿真结果能够知晓,本文提出的控制算法,能够有效的对系统波动进行控制,形成实时的跟踪,提高系统的动态性能,有效对电网频率进行调节,控制电网充电时的电压与频率,提高供电质量。也能够看出基于双向充电桩进行VSG优化,能够对电网频率进行有效调节,减少波动频率。通过VSG与MPC双层控制,合理对电力变换器进行控制,提高系统运行的稳定性。
四、结论
综上所述,根据V2G模式的电动汽车充放电为背景,对汽车的双向充电桩提出优化改进措施。经过优化的系统能够更有效的吸收电能,调节电网频率,保障用户的用电质量。采用模型预测与虚拟同步机结合、传统算法等实时性不足,针对电网的运行模式应是动态化反馈。因此,建立预测模型能够更有效的反映出实际结果。并且保证控制简单,提高系统性能,保证控制的有效性。
猜你喜欢
新高考·高二数学(2022年3期)2022-04-29
新高考·高二数学(2022年3期)2022-04-29
新能源汽车供能技术(2021年1期)2021-10-14
汽车维修与保养(2021年8期)2021-02-16
中学生数理化(高中版.高二数学)(2020年11期)2020-12-14
动漫星空(兴趣百科)(2019年3期)2019-03-07
电子制作(2019年23期)2019-02-23
中学生数理化·高一版(2018年6期)2018-07-09
海外星云(2016年17期)2016-12-01
汽车实用技术(2015年8期)2015-12-26