羽毛球智能拾捡小车设计
2022-01-22 07:10:48李漫天孙月巧
装备制造技术 2021年10期
李漫天,孙月巧
(广西大学机械工程学院,广西 南宁 530004)
0 引言
在全民健康运动的浪潮下,各种球类运动风靡全国。其中羽毛球是重点推荐的运动项目之一,深受大众喜爱,老少皆宜。而大部分发球机使用的羽毛球都是堆叠好后放入球筒中,训练后对于羽毛球的收集和整理堆叠是一个难题。羽毛球是由半球状的球托和16根羽毛制成,其中羽毛容易折断,收集时需要十分小心。到目前为止,国内外尚未有理想的收集此类设备,已经研发出来的产品存在着收集过程中损坏羽毛、收集但无法整理等一系列问题,无法产品化[1]。
基于上述原因,本文针对羽毛球独有的特点以及羽毛球收集整理过程中的特定需求,尝试设计一种功能稳定、机电一体的羽毛球智能拾捡小车,减轻劳动强度,具有一定的推广价值和经济效益。
1 羽毛球智能拾捡小车总体设计
设计的羽毛球智能拾捡小车,包括回旋拨球机构、皮带提升机构、收集整理机构及自动控制行走机构,如图1所示。回旋拨球机构由滚轴链条传动动力,拨球轴旋转带动拨球板360°旋转将球拨进。皮带提升机构将落球架中羽毛球提升,经过最高点后由球自身重力落入收集整理机构。收集整理机构通过振动板和挡板使羽毛球能球头向下掉落从而一个个堆叠起来自动整理,自动控制行走机构控制小车行走。
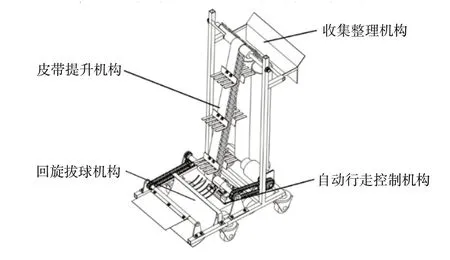
图1 总设计图
羽毛球智能拾捡小车操作过程如下:启动小车,控制小车移至羽毛球掉落处,拨球板旋转拨动羽毛球,将羽毛球拨至落球架,皮带提升机构将羽毛球提升,在其最高点将羽毛球倒下[2],重复以上动作,将掉落在地的羽毛球整理到球筒中,人工将叠好后的羽毛球用于训练或储存起来。
2 主要机构的设计
2.1 回旋拨球机构
机构以电机为动力源,通过链条和齿轮将电机动力传递至拨球轴。拨球轴通过定位轴座定位在机架上,链轮与转轴配合传递动力。拨回旋拨球机构如图2所示。

图2 回旋拨球机构
2.2 皮带提升机构
机构以电机为动力源,将动力传送至皮带轴,皮带轴与皮带精密贴合通过摩擦传力,固定在皮带上的提升板进行提升运动,使其上的羽毛球上升。皮带提升机构如图3所示。

图3 皮带提升机构
3 运动学与力学模型
3.1 回旋拨球机构的运动学分析
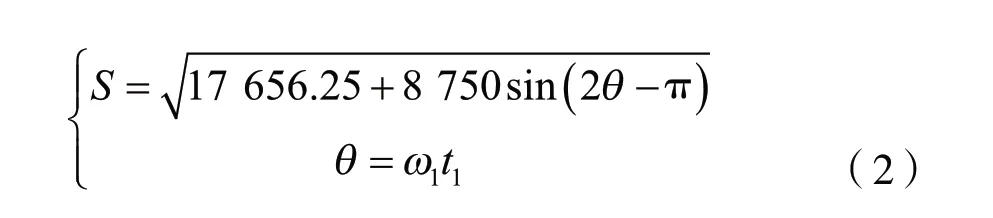
针对回旋拨球机构进行运动学分析[3],当拨球板接触羽毛球后,由于羽毛球与拨球板的摩擦力较大,所以羽毛球与拨球板接触后不会有相对运动,可将运动看作平面旋转运动,运动简图如图4所示,将拨球板看成平面的AB杆,羽毛球看成以C为圆点,半径为CD的圆,根据回旋拨球的矢量方程式,可以写出C点的位置方程如式(2):
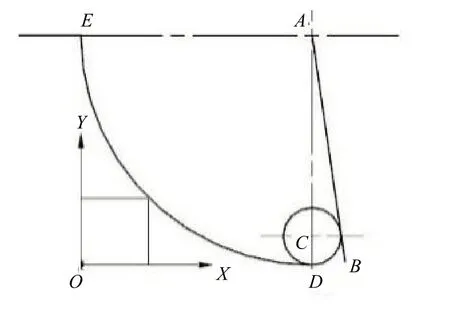
图4 回旋拨球机构运动简图

式中AE=AD=100mm,CD=12.5mm,θ为AC运动转过的角度,其运动规律为:
对运动位置方程求导,得到速度方程:

式中Vc为C点速度(mm/s);ω1拨球板角速度(rad/s);t1为为驱动时间(s)。
通过上述方程的求解表示出C点的位置、速度与时间的关系式,分别如式(2)和式(3)所示。
4 实物研制与试验
根据以上设计,制作了物理样机,如图5所示,并进行了实验,实验结果如表1所示。
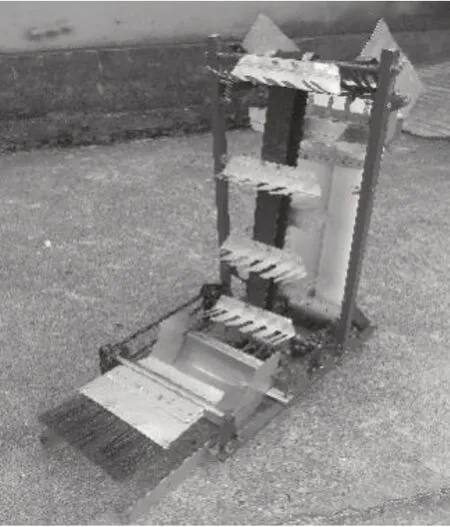
图5 装置实物图
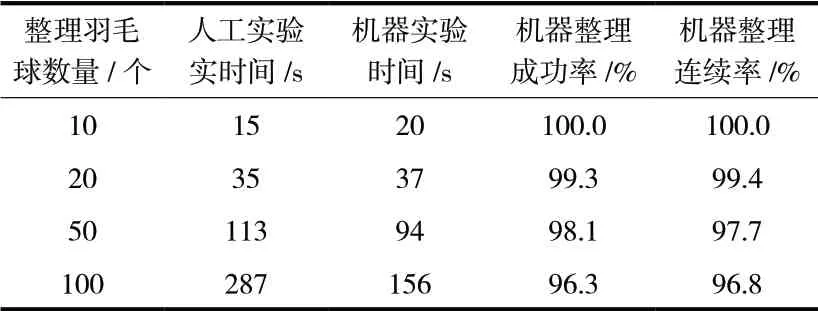
表1 实际测试数据
由实际测试数据分析可知,整理成功率稳定在98%左右,实现羽毛球自动捡球及整理的功能,对于大数量的训练后的捡球缩短人工收集整理所需要的时间45.6%以上,具有较高的工作效率,且羽毛球数量越多时机器的优势更明显,机器捡球整理的效率高,整理成功率在96.3%以上,工作性能较为稳定,机器连续工作的效率在96.8%以上,完成程度高,具有一定的实用价值。
通过实验,证明本文设计的羽毛球智能拾捡小车满足设计要求,在实际测试中具有较高的可靠性与一定的适应性[4]。
5 结语
本研究设计了一种羽毛球智能拾捡小车,整个小车结构简单,自动程度高,易于制造和使用。经过试验证明,设计的羽毛球智能拾捡小车可以快速稳定的实现拨球捡球、升降、整理功能,满足训练后人工捡球的需求,机器有着较高的可靠性,相比较人工收集整理,减轻了人工劳动强度,提高了训练效率。
猜你喜欢
科学与财富(2021年33期)2021-05-10 13:54:30
快乐语文(2020年36期)2021-01-14 01:10:32
科学大众(2020年17期)2020-10-27 02:49:02
文苑(2018年22期)2018-11-19 02:54:18
智能城市(2018年7期)2018-07-10 08:30:12
电子制作(2018年8期)2018-06-26 06:43:02
兰台内外(2017年6期)2017-05-30 06:46:47
公民与法治(2016年4期)2016-05-17 04:09:39
民族古籍研究(2014年0期)2014-10-27 08:24:20
河南科技(2014年22期)2014-02-27 14:18:16