并联三钳指柔性压电微夹钳的设计与分析*
2022-01-21 00:32蔡永根沈忠良肖国华杨少增崔玉国
传感器与微系统 2022年1期
蔡永根, 沈忠良, 肖国华, 杨少增, 崔玉国
(1.浙江工商职业技术学院 机电工程学院,浙江 宁波 315012;2.宁波大学 机械工程与力学学院,浙江 宁波 315211)
0 引 言
微夹钳作为微操作系统的末端执行机构,用于目标微物体的搬运、操作等,其性能的好坏直接决定系统的精确与否[1,2]。将压电执行器作为微夹钳的驱动器的研究较为广泛,而此类结构可分为压电悬臂梁式与柔性结构放大式。柔性结构放大式微夹钳具有输出位移与输出力大,结构多变等特点,使此类微夹钳结构的研究成为持续的热点[3]。
重庆大学机械学院纪久祥[4]设计的柔性结构驱动微夹钳,该微夹持器有两个钳指,输入位移经柔性铰链机构放大后,可使输入位移放大5.8倍,钳指最大输出位移为91.5 μm,可操作微物体的尺寸范围为317~500 μm。澳大利亚莫纳什大学Zubir M N M[5,6]设计的柔性铰链放大式二钳指微夹钳;压电执行器产生微位移,驱动左边杠杆偏转,使左钳指平行移动,同时右边杠杆在压电执行器驱动下带动右钳指移动,从而使微夹钳产生夹持操作。钳指最大运动位移可到达100 μm,最大夹持力可达到10 mN。新加坡南洋理工大学Nah S K等人[7]设计的柔性铰链式压电微夹钳,整体尺寸为36 mm×30 mm×3 mm,在100 V驱动电压作用下,经柔性铰链放大后的钳指输出位移为170 μm。吉首大学伍威等人[8]设计的空间型微夹持器具有4个钳指,钳指最大输出位移与放大倍率的理论值分别为3.817 mm和47.722,仿真值为3.702 mm和46.284,解析值与仿真值具有良好的一致性。重庆大学林超等人[9,10]设计了一种可三级放大输出位移的微夹钳,具有大位移、低耦合等特点,其固有频率为223H,位移放大倍数可实现19.7,在750 μm的行程下,其耦合位移仅为2.625 μm。
国内外学者对两钳指的柔性结构微夹持器有较为深入的研究。然而,两钳指微夹持器的输出力为平面夹持力,无法满足不规则操作对象的稳定抓取、搬运、装配等操作,更无法对微小操作对象实现较为精准的定向控制[11,12]。在实际工程应用中,微夹钳需与其他构件配合使用,只在理论上追求一体成型微夹钳的无装配误差、无摩擦等优点,不但会限制应用范围,更会制约其结构的创新与发展[13,14]。
受工程应用中三爪电缸的启发,本文设计一种结构空间对称的并联三钳指微夹钳,可单个压电执行器同时驱动三个并联钳指,即可实现三个钳指位移与力的同步输出与平行输出。
1 微夹持器结构设计
双钳指微夹持器通常在一块原料上加工而成,可省去装配上的误差,但其结构较为复杂、加工精度要求高,在实际加工过程中,需不断改变夹持角度,不仅加工周期长、成本大,而且加工过程中易变形、加工精度很难保证。本文所设计并联三钳指微夹钳存在同样的加工问题,因此选择将其拆分成多个零件,通过不同的定位方式保证精度要求。
图1为并联三钳指微夹钳的三维模型总装图,包括3个结构相同的并联钳指、1个钳指联结块、1个压电执行器底座、1个底座、1个预紧螺钉、3个定位环、1个压电执行器。三个钳指通过切边定位销与螺钉周向均布并联在底座上,联结块将三个钳指上桥式放大机构的运动端联结为一个整体,通过内部的定位环保证其定位精度,此设计可实现单个压电执行器同时驱动三个钳指,既可保证其运动状态同步,又能实现输出位移一致;通过压电执行器底座及其下方的预紧螺钉实现压电执行器的预紧。
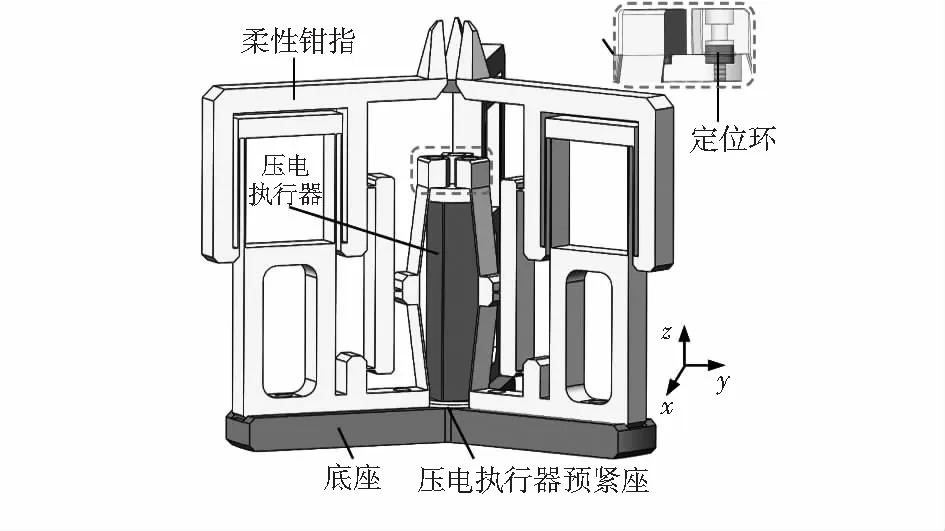
图1 总装示意
柔性钳指通过桥式机构和杠杆机构实现位移的二级放大,通过两个四杆机构的导向机构消除钳指在垂直于水平方向上的耦合位移,可使输出位移始终保持平行输出,如图2所示。压电执行器沿z轴方向输出的位移作为柔性钳指的输入位移,输入位移经桥式放大机构,实现位移的一级放大;接着,经一级放大后的位移经过杠杆机构实现位移的二级放大。在对钳指定位上,使用切边圆柱实现x向、y向及旋转方向的约束。

图2 柔性钳指
桥式放大机构与杠杆机构较为熟悉。四边导向机构,如图3所示,在非工作状态下,为两个长方形连杆串联机构,可将其看作一个正向四连杆机构和一个逆向四连杆机构相叠加,当导向机构在x轴正方向受力时,正向四连杆机构沿着y轴正方向所产生的寄生位移δz与逆向四连杆机构沿着y轴反方向所产生的寄生位移δf在理论上数值相等,二者可相互抵消。
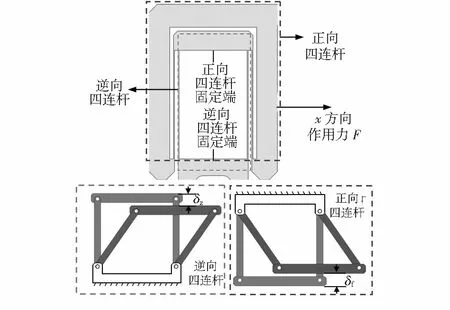
图3 导向机构工作原理
该微夹钳选用的材料为铝合金7075,尺寸参数如表1所示,整体尺寸为158 mm×158 mm×150 mm。

表1 微夹钳尺寸参数
2 三钳指微夹持器静动态特性分析
对三钳指微夹持器进行刚度分析是静态分析的核心部分,而静态分析是研究其输出位移与夹持力的基础。接下来将运用较为形象、简单的伪刚体法,完成微夹持器的理论分析。
2.1 位移放大倍率模型
首先分析桥式放大机构的放大倍率理论模型,图4为其简化模型,a,b,c,d分别为铰链之间的交点,柔性薄板与z轴的初始夹角同为α,受力变形后与z轴的夹角为β,上端为运动端,下端为固定端,因此,当压电执行器输出位移为δAz时,z方向输出位移(即A点的输出位移)δAz=xz/2,忽略薄板ab,cd的变形,则可得

图4 桥式放大机构模型
γl1cosα+xz/2=γl1cosβ
(1)
γl1sinα-δBx=γl1sinβ
(2)
式中γ=0.85,为连架杆有效长度数。
根据式(1)、式(2)求得δBx的表达式
δBx=
(3)
因此,可得桥式放大机构的放大倍率Rq
Rq=2δBx/δAz
(4)
杠杆放大机构分为微夹持器的第二级放大,其简化模型如图5所示,桥式放大机构的输出位移δBx作为杠杆放大机构的输入位移,杠杆机构的输出位移δ1与δBx的比值即为杠杆放大机构的放大倍率Rl

图5 杠杆放大机构简化模型
(5)
因此,三并联微夹持器的放大倍率模型为
R=Rl×Rq
(6)
2.2 输入刚度
2.2.1 三并联桥式放大机构
所设计微夹持器的柔性钳指为周向空间均布,每个钳指包含桥式放大机构、杠杆放大机构、导向机构三部分。首先对一级放大的桥式机构进行刚度分析,该桥式机构由刚性板与柔性链组成,三个桥式放大机构空间对称且为并联,图6为三维模型,由于两两互相对称。多位学者已经运用不同方法推导出桥式放大机构的理论模型[15,16],而空间并联型桥式放大机构鲜有推导,基于桥式放大机构因柔性薄板而产生位移的特点,在分析柔性薄板的基础上求出桥式放大机构的刚度,如图4、图5所示,A点处的刚度为其左右移动方向上柔度的倒数,A点的柔度由柔性薄板1~6的柔度决定,故对6个柔性薄板的柔度进行分析,由于其空间对称,只需分析出1、4,或2、5或3、6其中的一组即可,另外2组可通过对称关系求出。
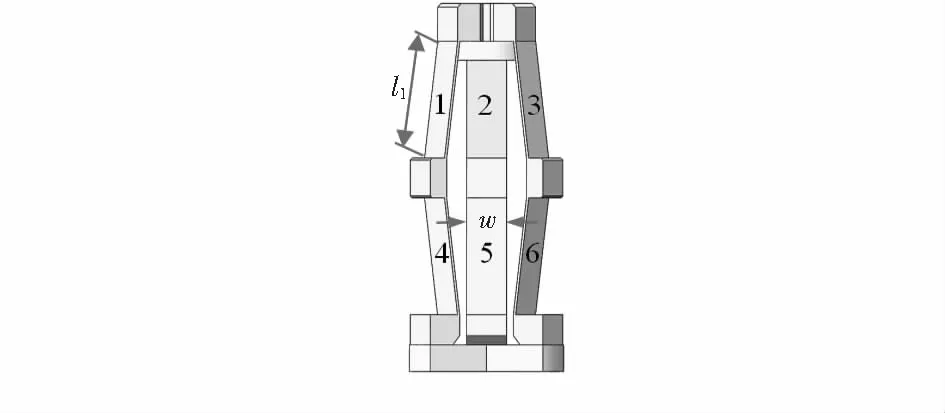
图6 并联桥式放大机构
由于柔性薄板的尺寸完全一致,故各柔性薄板自由运动端面中心点处的柔度矩阵完全相同,均为
(7)
柔性薄板1~3为相互串联,柔性薄板4~6为互相串联,则柔性薄板1~3串联而成的的组合体在A点出的柔度矩阵为
(8)

由于柔性薄板4~6与柔性薄板1~3对称,则其柔度矩阵可表示为
CA456=Rx(π)CA123(Rx(π))T
(9)
柔性薄板1~3构成的组合体与柔性薄板4~6构成的组合体通过并联方式连接,则在A点处的柔度矩阵为
C123456=((CA123)-1+(CA456)-1)-1
(10)

图7 柔性薄板不同受力点
将作用于o点处的力Fo通过柔度矩阵坐标变换的方法变换到o′点。Fo和Fo′的关系可表示为[17]
(11)

柔性薄板在力Fo,Fo′作用下的柔度矩阵Co,Co′的关系式为
(12)
因所研究柔性薄板仅在平面内运动,所以,对应的柔度变换矩阵如下
(13)
柔性薄板的尺寸如表1所示。

表1 柔性薄板的尺寸
代入薄板尺寸,可得
(14)

2.2.2 位移导向与杠杆放大机构
杠杆放大机构为该夹持器的二级放大机构,当桥式放大机构的输出位移δBx时,经由杠杆EG实现位移的二级放大,经二级杠杆放大后的位移为δ1,δ1作为位移导向机构的输入位移, 直梁型铰链D,E,G的尺寸如图8所示。其转角刚度为kr,每个直圆铰链上对应的转矩为MD,ME,MG,kr为
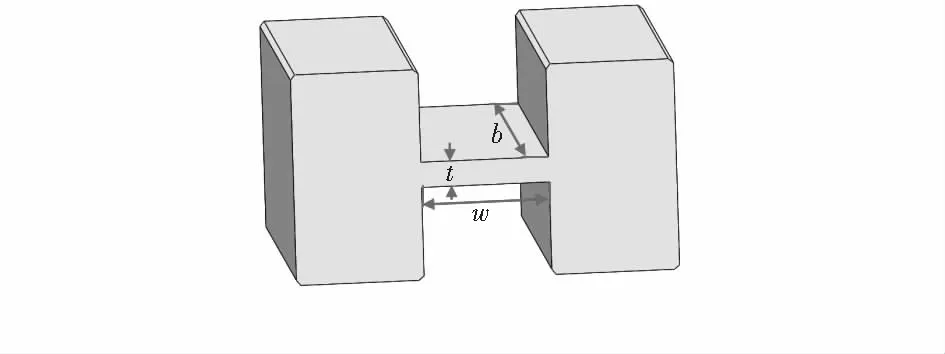
图8 直圆型铰链
kr=EI/w
(15)
式中E为材料的弹性模量。当杠杆受力发生转动时,其转动角度为θ1,如图5所示,可近似为θ1=sinθ1=δ1/(l3+l4),由于每个直梁铰链的转矩均互等,且为krθ1。
由图5放大杠杆受力平衡可得
FD=FG+FE
(16)
MD+ME+FG(l3+l4)cosθ1=MG+FDl3cosθ1
(17)
位移导向机构由正向平行四连杆和逆向平行四连杆组成,四连杆中的连架杆一段固定一段自由,连架杆绕着固定端旋转,则位移导向机构模型可简化为图9。连架杆两端的转动刚度kc为

图9 位移导向机构简化模型
kc=2γKθEIc/l5
式中Ic为连架杆截面惯性矩;θ2为摆动的角度,且满足cosθ2=1。
由位移导向机构的受力平衡可得
MG+MI+MJ=γl6FHcosθ2
(18)
MI=MJ=kcθ2=2γKθEIcθ2/l5
(19)
联立求解式(15) ~式(19),可求出位移导向与杠杆放大机构的刚度K2
(20)
已知三并联桥式放大机构的刚度K1,位移导向与杠杆放大机构K2,由于K1与K2为串联刚度,故可求出微夹持器的整体刚度K。
2.3 动态特性分析
确定微夹钳的材料后,对应各个构件的重量已知,桥式放大机构的输出位移、微夹钳的输出位移已知,其动能E可表示为
(21)
式中m1为桥式放大机构可移动部分及CD刚性部分的重量,m2为位移导向机构可移动刚性部分的重量,JEG为杠杆放大机构中杠杆的转动惯量。
将式(3)~式(6)代入式(18),可得微夹钳的质量M
(22)
由拉格朗日方程可知,固有频率的计算公式可表示为
(23)
3 微夹持器仿真分析
3.1 放大倍数与静态位移仿真分析
将建立的三维模型导入Ansys,微夹持器底座全约束,给与压电执行器相接触的桥式放大机构的内表面沿着z轴正方向施加10 μm的位移,图10为其仿真结果,仿真出的放大倍率为8.486;将xz=10 μm代入式(6),可得出理论计算出的放大倍率为9.03,二者数值相近。
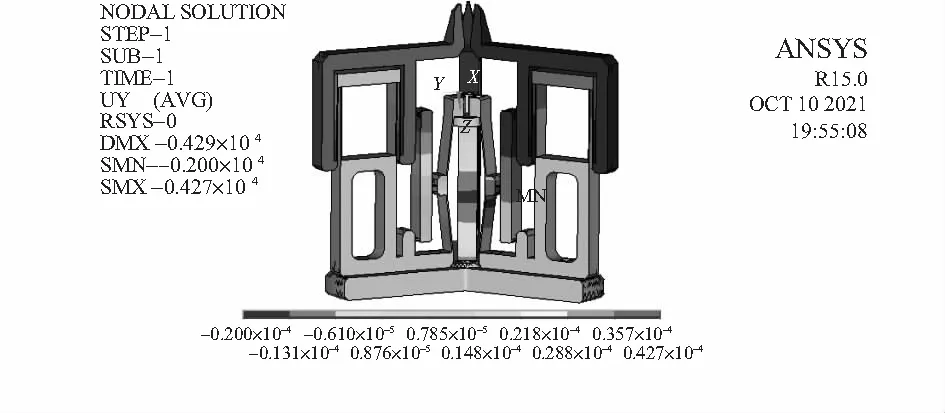
图10 并联三钳指微夹持器的输出位移仿真
接着,以间隔为10 μm,逐一施加10~100 μm的位移,不同施加位移下,微夹钳的放大倍数具有较好的一致性,相对误差率几乎为0,如图11所示。

图11 微夹钳放大倍数
3.2 输入刚度仿真分析
给桥式放大机构与压电执行器相接触的内圆表面施加1 N的均布力,观察内圆表面沿z轴方向的运动位移。由图12的分析结果可知,在1 N的均布力作用下,驱动部分沿z方向(即运动方向)产生0.31×10-4μm的位移,故仿真而得的微夹持器的刚度为32.258 N/mm。已知桥式放大机构的输入刚度,将尺寸数据代入式(17),理论计算出的输入刚度为35.782 N/mm,对比可知,理论值与仿真值相近。

图12 并联三钳指微夹持器的输入刚度仿真
3.3 动态特性仿真分析
给桥式放大机构与压电执行器相接触的内圆表面施加1 N的均布力,频率范围为0~2 000 Hz,图13为微夹钳前10阶模态分析结果,其一阶固有频率为204.8 Hz,振型如图14所示。将微夹钳的尺寸数据代入式(20),可知理论计算的一阶固有频率为201.4,仿真值与理论值对比可知,二者相近。
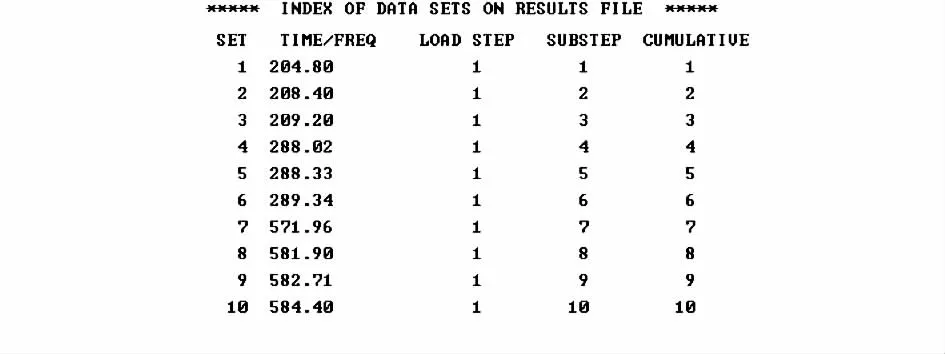
图13 各阶模态固有频率的分析结果

图14 微夹钳一阶模态振型
4 结 论
设计了并联三钳指柔性微夹持器,可通过单个压电执行器同步驱动并联的三个钳指,同时可实现输出位移同步放大与平行输出。首次建立了空间型并联三钳指微夹钳位移放大倍率、输入刚度、固有频率的数学模型,并求出对应的理论数值;利用Ansys仿真出位移放大倍率、输入刚度、固有频率的仿真数值,并将解析值与仿真值进行对比分析,两种方式得出的位移放大倍率、输入刚度、固有频率吻合度较高,从而可证明所设计并联三钳指柔性结构的可行型。
猜你喜欢
铝加工(2022年2期)2022-11-23
电工技术学报(2022年20期)2022-10-29
汽车实用技术(2022年15期)2022-08-19
东北大学学报(自然科学版)(2022年6期)2022-07-08
机械科学与技术(2022年2期)2022-03-30
作文新天地(小学版)(2021年8期)2021-08-24
北京航空航天大学学报(2021年7期)2021-08-13
科技风(2021年10期)2021-04-18
科技创新导报(2021年33期)2021-04-17
科普童话·百科探秘(2018年7期)2018-09-13