
基于人工智能算法的CYGNSS数据土壤水分反演
2022-01-20 09:23贾燕金双根严清赟郭献涛
南京信息工程大学学报 2021年6期
贾燕 金双根 严清赟 郭献涛
0 引言
地表土壤水分是地表与大气相互作用的重要因子,是作物生长、发育的基本条件.它不仅对陆地表面蒸散、水的运移、碳循环有很强的调控作用,而且也是气候、水文、生态、农业等领域衡量土壤干旱程度的重要指标[1-3],因此,及时准确地获取地表土壤水分信息具有重要的意义.但是,由于监测设备的高成本以及点观测的局限性(小范围观测),传统的现场观测无法满足持续监测大面积土壤水分含量的需求[4].微波遥感技术的兴起和发展使得传统的点测量转移到面测量,为获得区域和全球尺度的高分辨率的土壤水分信息提供了可能.
目前,许多被动微波卫星或传感器已被用于观测地表土壤湿度(<5 cm),如美国宇航局的AMSR-E(先进微波扫描辐射计-地球观测系统)[5]、欧洲航天局的SMAP(土壤湿度被动和主动)[6]和SMOS(土壤湿度和海洋盐度)[7].尽管使用微波传感器可以获得高精度的土壤水分产品,例如,SMAP 36 km土壤水分产品的误差约为0.04 m3/m3[8],但其2~3 d的较长重访周期限制了其更高的时间分辨率(1 d)应用.
GNSS-Reflectometry (GNSS-R)反射信号遥感是一种介于主动和被动遥感之间的新型遥感探测方法,可以看作是一个非合作人工辐射源、收发分置、多发单收的多基地L波段雷达系统,从而兼具主动和被动遥感两者的优点[9-10]:1)它利用全球卫星导航系统反射信号进行测量,不需要额外的发射机,这使得开发轻便、紧凑和低成本的接收机系统得以实现;2)系统配置灵活,可自行设计接收多种高度、多角度和多极化的目标物反射信号,为多种接收方式、算法研究提供了可能.随着GNSS-R反演土壤水分研究的不断深入,具有长时间序列观测数据的新星座观测计划成为GNSS-R土壤水分反演的新途径.最新的CYGNSS星座系统,含有8颗微小卫星,可同时接收来自GPS卫星的直射信号和地面反射信号[9],大大增加了地球可观测面积.它的重访周期仅为4 h,空间分辨率最高可达到0.5 km[11].CYGNSS星座系统提供的高精度优良数据,为实现全球高时空分辨率的土壤水分长期动态监测提供了有力的支撑[12-24].
Eroglu等[17]提出了一种基于人工神经网络(ANN)的日土壤水分反演方法,其设计的ANN输入部分包括CYGNSS数据和其他辅助数据:归一化差异植被指数(NDVI)、植被含水量(VWC)、地形高程、地形坡度和表面粗糙度.反演结果的ubRMSE(无偏均方根误差)为0.054 4 cm3/cm3,R为0.90,取得了较好的研究成果.虽然ANN能够很好地反演土壤水分,但该方法十分依赖训练数据集.倘若训练数据集不能代表所有实测数据,就会出现反演值溢出的情况.Yang等[19]采用了类似的算法评估了星载GNSS-R星座系统(TDS和CYGNSS)SM预测性能.R为0.79,ubRMSE为0.062 cm3/cm3,并采用了6个辅助参数.值得注意的是,目前基于人工智能的CYGNSS数据反演土壤水分研究[17-19],大多使用SMAP作为参考和验证数据,且依赖于大量的辅助输入参数,例如海拔高度、地形坡度等.
因此,本文提出一种基于预分类的人工智能算法,利用CYGNSS数据进行SM预测和估计.采用上述方案,其普适性和实用性较强且需要的辅助变量较少,学习模型的复杂度低,训练效率高且训练过程简易,同时预测结果的精度高.为CYGNSS SM估计提供了新的思路和手段.
1 数据描述
本章主要描述CYGNSS数据获取与预处理过程,并介绍了SMAP数据以及实地土壤水分参考数据及来源.
1.1 CYGNSS数据
本文拟采用的土壤水分数据产品主要包括星载CYGNSS以及实测土壤水分数据.其中,星载CYGNSS有8颗微卫星,每颗卫星每秒可以同时提供4个地面反射测量值(免费获取:https:∥podaac.jpl.nasa.gov)[11],因此每秒可以同时获取总共32个观测数据.CYGNSS原始数据包括每个镜面反射点(SP)处的双地基雷达横截面值(BRCS)和信噪比(SNR),以及相关的几何测量和导航定位信息,例如入射角、SP坐标、从SP到发射端和接收端的距离等.本文中使用2018年整年的CYGNSS数据用于建模和预测,并把每日CYGNSS数据样本进行重投影、重采样到EASE-Grid(该网格为等积圆柱投影)网格上,便于后续的计算与比较验证.
本文拟采用中国区域范围内的CYGNSS数据中SP处SNR超过0 dB的数据进行土壤水分反演,以确保数据的可靠性.同时,保留BRCS峰值在时延轴第4与第15位的数据,天线增益大于零的数据以及仰角大于30°的数据,相关类似操作也在文献[17-20]中采用.另外,由于CYGNSS未直接提供GNSS-R双基雷达反演中所需的地表反射率,因此需要通过CYGNSS已提供的相关数据来推算地表反射率,将在下一节进行详细介绍.
1.2 SMAP数据
SMAP提供日土壤水分产品,且平均每隔3 d左右,其数据可覆盖到全球±45°纬度内的陆地区域.本文拟采用SMAP L3级产品,EASE-Grid版本6提供的日土壤水分产品,该数据的空间分辨率为36 km×36 km(免费获取:https:∥nsidc.org/data/SPL3SMP/).SMAP的数据包含土壤水分估计值、质量标记(用于过滤SMAP数据)、粗糙度和植被不透明度(vod,或τ) 以及相关的轨道坐标值[25].本文主要使用SMAP中的粗糙度和植被不透明度τ作为辅助变量参与建模,并使用质量标记“反演成功”作为数据筛选的条件.因为单日的SMAP数据覆盖率较低,我们将SMAP数据都进行了3 d平均的操作便于其参与后续的土壤水分建模运算,并将SMAP的粗糙度和τ数据映射到CYGNSS数据使用的EASE-Grid网格上.
1.3 参考数据
将上述数据作为输入变量,建立土壤水分预测模型.输出的土壤水分参考数据将采用中国土壤水分自动观测站收集的实地地表SM数据.该观测网由多个站点组成,本文采用的站点分布及其覆盖的区域如图1所示.每个站点提供每小时土壤表面以下0至100 cm深度的SM测量,间隔10 cm.根据不同的土壤含水量和土壤类型,GNSS-R信号在土壤中的穿透深度可以从几厘米到大约20厘米不等[15].因此采用地表上层10 cm 的实地观测SM数据,视为与GNSS-R技术反演土壤水分匹配的最佳值.在本研究中,每天逐小时的地表土壤水分数据被用来作为参考真实土壤水分数据.此外,还提供了采样地点的地理位置信息(包括纬度、经度).

图1 本研究中国土壤水分自动观测站的分布Fig.1 Distributions of automatic soil moisture observation stations in China used for this study
2 估计方法
本章详细叙述了从CYGNSS数据计算反射率以及土壤水分的建模和预测过程,包括地表反射率的计算、几种用于土壤水分反演的经典人工智能算法,以及预分类人工智能算法的模型构建和反演SM的过程.
2.1 CYGNSS观测量计算
拟利用处理好的CYGNSS数据,在顾及地表粗糙度和植被的情况下,进行土壤水分反演.对于有植被覆盖的区域,地表的反射率[12-25]可表示为以下的形式:
Γ(θ)=R(θ)2γ2exp(-4k2s2cos(ϑ)),
(1)
其中,入射角为ϑ,R为菲涅耳反射系数,透射率γ包含了植被对信号传播的衰减程度,指数项表示地表粗糙度效应,其中k为信号波数,s为地表均方根高度.
反射率Γ和土壤水分呈线性正相关的关系,因此Γ可被视为与土壤水分相关性最大的特征变量.另外,由于透射率γ是植被不透明度τ的函数,其形式为γ=exp(-τsec ϑ),所以拟将SM视作Γ、τ和地表粗糙度3个变量的函数.本文拟采用SMAP数据中的植被不透明度τ和地表粗糙度作为辅助数据,地表反射率可由CYGNSS数据获取.
根据光滑地表相干反射分量的理论假设,并考虑CYGNSS提供的BRCS值,地表的反射率可由下列公式[17]求得:

(2)
其中Rt和Rr分别表示发射机和接收机到SP的距离,这些相关参数由CYGNSS数据提供.值得注意的是,反射率的求解可采用多种途径,由于采用BRCS 获得的Γbrcs在土壤水分反演中已被证实取得的效果最佳[17],故本文采用式(2)的方法求解反射率,结果如图2所示.

图2 用于实地土壤水分反演的CYGNSS (2018-01-01) 反射率分布Fig.2 An example of CYGNSS reflectivity samples for SM estimation in China on Jan.1st,2018
2.2 人工智能算法用于土壤水分反演
机器学习(ML)是一种主流的实现人工智能的方法,而机器学习最基本的做法,是使用算法来解析数据、从中学习,然后对真实世界中的事件做出决策和预测.与传统的为解决特定任务、硬编码的软件程序不同,机器学习用大量的数据来“训练”,通过各种算法从数据中学习如何完成任务.机器学习历经70年的曲折发展,在很多方面收获了突破性进展,经典的机器学习的研究方向主要包括决策树、随机森林、人工神经网络、SVM等,且已经被运用到了土壤水分的反演研究中.
随机森林[26]利用bootsrap重抽样方法从数据集中抽取多个样本,对每个样本分配一个决策树进行决策,即建立多棵决策树,形成一个决策树“森林”,然后将多棵决策树进行组合,最后通过投票方法得到最终预测结果.该方法能够有效地提高对新样本的分类准确率,降低模型的过拟合能力.
人工神经网络(Artificial Neural Network)模型,简称ANN,是1980年代以来人工智能领域兴起的研究热点之一[17].从生物学的角度来说,它是模拟人脑对信息处理的过程,是对人脑神经系统的数学模型抽象.神经网络实现一种数学运算,由大量的神经元相互连接而成,每个神经元可以看作是一种运算输出函数,该模型可以用于拟合复杂的数学函数.人工神经网络模型分为多层前向神经网络、自组织神经网络、Hopfield神经网络等.
XGBoost算法,全称Extreme Gradient Boosting,出现于Chen等[27]2016年发表的论文中,在Kaggle等比赛中该算法取得佳绩.XGBoost以决策树模型为基础,是对梯度提升树的改进算法.该算法是一种适合处理稀疏数据的树学习算法,支持并行运算和分布式运算,通过对损失函数进行二阶泰勒展开来达到二次优化的目的,因此该算法学习效果好、分类精度高、处理速度快,并具有强大的可伸缩性,被人们广泛应用于包括股票选择策略、电力系统预测等诸多领域.
2.3 基于预分类人工智能算法的土壤水分预测模型
GNSS-R中接收的地表反射信号主要成分为地表的相干反射分量.随着地表粗糙度和植被的增加,非相干散射分量增加,同时相干分量降低.通过对反射率、粗糙度和植被这3个主要参数的拟合计算,可以获得SM估计值[16].因此在本文的SM预测模型中,CYGNSS反射率作为主要变量,SMAP粗糙度系数和植被不透明度作为辅助变量.

图3 基于预分类ML算法的土壤水分预测模型结构示意Fig.3 An example diagram of SM prediction model based on pre-classification ML algorithm
之前的研究[17-19]试图添加各种各样的辅助数据,以提高SM估计的准确性.可以发现,添加的大部分辅助数据都与地形有关,如地形坡度和土壤质地[17-19].这些辅助数据已表明其有能力提高预测的准确性,但辅助数据量较大且种类较多,尤其是在全球尺度下,获取稳定的多种辅助源变得较为困难.因此,本文提出了一种新的预分类策略,该策略基于传统的ML回归方法,采用分类建模的思想,来最小化不同土地类型数据对学习模型的影响,以简单实用的方式提高SM估计精度.图3展示了通过使用ML回归和预分类策略方法对CYGNSS反演SM进行建模学习和回归预测的流程.
本文使用2018年的CYGNSS、SMAP和相应的实地参考土壤水分数据建立学习模型,模型的输入参数包括CYGNSS反射率,并将其视为模型的主要输入参数(图3).SMAP 的粗糙度系数(rou)和植被不透明度值(vod)用作模型的辅助参数,实地SM数据被用作训练和验证所提出的ML方法的真实参考数据.根据SMAP提供的国际地圈-生物圈计划(IGBP)土地类型标识数据,对不同土地类型的样本进行分类重组,然后分别使用同类样本建立若干子模型(例如,土地类型1、2等)进行SM建模以及预测.
将提出的预分类ML算法结果与传统ML回归进行比较,并采用10倍交叉验证(CV)训练和验证所提出的预分类模型回归预测的可行性,根据均方根误差指标(RMSE)结果选择最佳算法.10倍交叉验证是常用且流行的方法,与其他方法相比,它通常会产生较少的偏差.因为它确保了来自原始数据集的每个数据都有机会出现在训练和测试集中.将整个数据集随机分成10个部分(取决于数据大小),然后用9份作为训练集对模型进行拟合,并使用剩余的集合对模型进行验证.记下RMSE作为性能指标.重复此过程,直到第10份用作测试集.将每次迭代中记录的RMSE的平均值作为最终评估性能指标.
3 结果与评估
本章对提出的预分类机器学习反演算法进行了建模以及验证.本文选取了2018年的CYGNSS数据及其对应的实地真实数据.基于第2章描述的土壤水分预测模型结构,对基于预分类的各种人工智能算法结果进行分析及验证.
3.1 多种人工智能算法反演土壤水分结果比较
本文采用了不同的传统ML(RF、SVM、XGBoost)和高级神经网络(ANN)算法进行土壤水分预测的计算,以及展示了各个算法在增加了预分类策略后的效果比较(表1).本文中人工智能算法的选择基于两个原因:其一是此算法已经被证实可用于土壤水分反演并取得了较好的预测效果,其二是此算法较为经典,运用广泛且执行效率较高.根据SMAP提供的IGBP土地分类,CYGNSS数据在中国区域共包含7个类别.通过使用2018年的数据分类建立预测模型,展示了所提出的预分类ML回归在CYGNSS土壤水分预测中的性能.
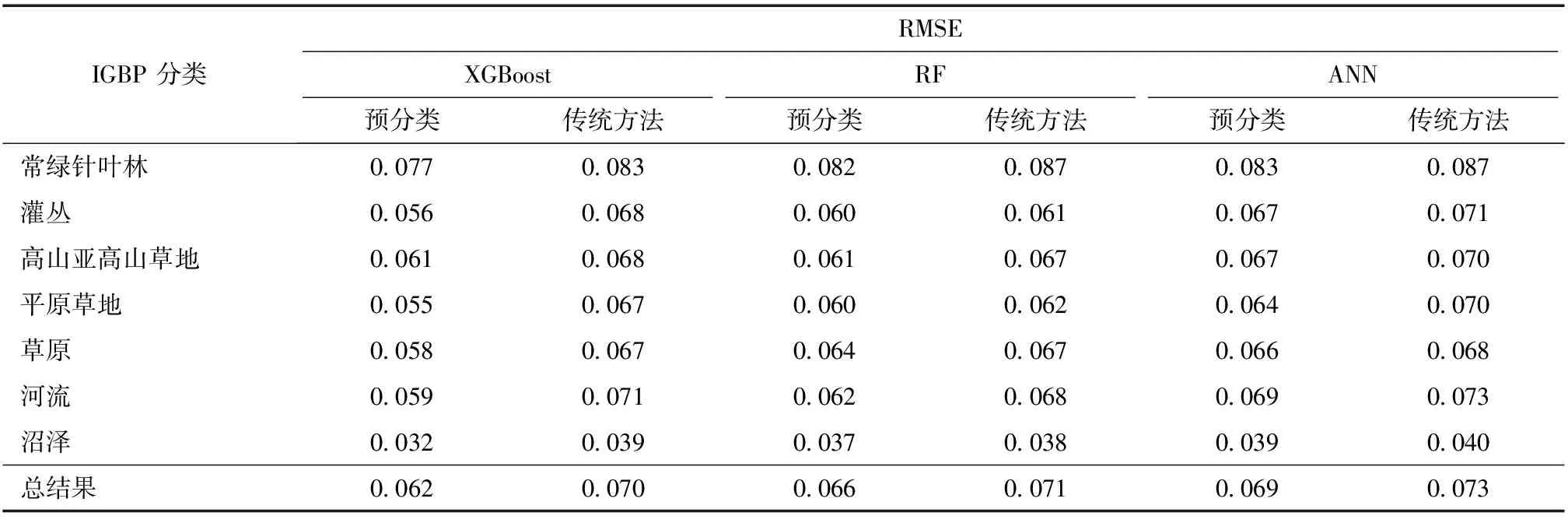
表1 CYGNSS SM估计的性能统计
与传统的回归模型比较,SM预测效果较好,提出的预分类(子模型建模)策略方法在所有算法(传统ML和DL)以及所有土地类型中均取得了良好的效果,使用预分类策略时RMSE有了明显下降.此外,通过比较不同的ML算法,RF的性能优于ANN,这与文献[18,20]一致.此外,XGBoost的性能最好,RMSE最小为0.062 cm3/cm3.在后续的分析中,采用预分类策略的XGBoost作为最优预测模型,展示CYGNSS SM估计在土壤水分预测和时空分布方面的表现.

图4 CYGNSS SM反演结果在训练集(a)和测试集(b)的密度Fig.4 Density plots of CYGNSS SM retrievals using training (a) and test (b) data
在图4中,给出了反演SM数据测试集密度的示例来进一步展示CYGNSS 模型预测的SM和实地参考SM数据之间的对应关系.密度图显示了使用XGBoost预分类策略进行SM估计的结果,其与实地 SM值有相当好的一致性,总体相关性(R)为0.8.尤其是当数据最密集时,点的分布沿1∶1线居中.但是,如果数据密度较低,则稍稍显示偏离直线的趋势.斜率呈下降趋势,小于1,这意味着CYGNSS预测模型在某种程度上低估了SM值.这一现象在之前的研究[16]中也有报道,原因可能是较高土壤水分的地表通常植被生长较为茂密,植被含水量也较高,导致多种非相干分量增加、相干分量减少,此时反射率的变化不足以完整和正确地表达地表湿度的变化,而且土壤湿度和信号相干分量具有正相关的关系,导致学习模型不能正确提取高土壤湿度地表的特征,因此模型预测的SM较低.此现象会在未来的工作中进行进一步验证和分析.
3.2 XGBoost预分类的CYGNSS SM 反演分布结果
本节采用性能最优的预分类XGBoost算法进行土壤水分预测的分析,并展示了其在全国范围内的实地测量参考数据站点中预测土壤水分的分布及其性能.其中表2展示了CYGNSS SM预测土壤水分和实地土壤水分观测站SM土壤水分值的性能指标值,把全国土壤水分站按照地表特征以及地域行政区域划分为5个土壤水分网络.针对5个SM网络中的真实地表土壤水分,分别展示其总体和区域的RMSE和无偏RMSE(ubRMSE)等性能指标,有助于与其他研究进行对比和比较[17-19].

表2 基于预分类的XGBoost算法相对于现场真实 测量SM的总体性能
在表2中,基于预分类的XGBoost CYGNSS模型反演土壤水分预测结果相对于真实参考土壤水分达到了较高的精确度,总体平均为ubRMSE(0.050 cm3/cm3)和RMSE(0.059 cm3/cm3).此外,不同的区域主要的土地类型不同,因此预测的土壤水分结果有些许差异.特别是,贵州地区相对于其他区域,其土壤水分预测误差较大,RMSE为0.066 cm3/cm3,ubRMSE为0.057 cm3/cm3.原因可能由于此地区所含有的主要地表覆盖是树木和森林,且有大量高低起伏的山体.因此,密集的植被和高地特征显著影响反射信号中相干分量的接收,这一现象在上一节中也进行了详细的阐述.
图5展示了所有采用的现场观测站点及其各自土壤水分预测精度的分布.这里我们分别计算了每日平均CYGNSS土壤水分估计和真实参考数据之间的精度指标RMSE.如上所述,RMSE值的波动受到土壤质地和周围环境的影响.一般来说,基于CYGNSS预测的SM与现场观测的真实土壤水分在绝大多数的站点都表现出了较高的精确度,进一步表明预分类人工智能CYGNSS方法得到的SM精确度较高,可用于估计预期的SM值.

图5 CYGNSS SM各站点土壤水分反演结果分布Fig.5 Accuracy distribution of soil moisture retrieved from CYGNSS
4 结束语
本文提出了一种基于预分类的人工智能CYGNSS数据反演土壤水分的方法,以求用较少的辅助变量达到较好的土壤水分预测效果.新的预分类策略具有高集成度的特点,根据不同的土地类型对数据进行预分类,然后分别对每个类别的数据进行建模学习,构建土壤水分预测子模型.对具有相似特点的同类型土壤质地的数据集中建模,这一操作有助于最小化不同土地类型给土壤水分预测带来的影响,能够帮助机器学习模型更准确地发现和提取数据特征,进而建立更精确的学习模型,从而提高土壤水分预测值.输入变量为CYGNSS反射率、SMAP植被不透明度和粗糙度,输出变量为实地参考土壤水分值.采用预分类策略的土壤水分反演结果与传统的ML回归方法进行了比较,反演结果均展现了高准确度.预分类策略显示了更强的预测能力,多种典型ML方法在采用预分类策略时其RMSE明显下降.其中,预分类的XGBoost算法预测效果最佳,RMSE为0.062 cm3/cm3,相关系数R=0.8.此外,分类结果显示不同的地表种类对土壤水分预测精度有影响.值得注意的是,我们发现CYGNSS预测模型在某种程度上低估了SM值.推测原因可能是由于高土壤水分地区通常植被较为茂密,植被含水量也较高,非相干分量增加,导致接收的反射信号相干分量不能够准确表达真实地表土壤湿度的情况,进而致使模型预测的SM较低.此现象会在未来的工作中进行进一步验证和分析.此外,本文采用了实地真实土壤水分参与建模,其数据量较少,今后可采用更大尺度的数据进行建模,预计能更有利于预分类人工智能算法发挥作用.本文采用预分类的人工智能算法反演土壤SM方案,普适性和实用性较强且应用的辅助变量少,学习模型的复杂度低,训练效率高且训练过程简易,同时预测结果的精度高,其通用性较强也可用于其他的回归预测应用研究中.
猜你喜欢
中等数学(2022年5期)2022-08-29
长春理工大学学报(自然科学版)(2022年3期)2022-08-25
农业工程学报(2022年10期)2022-08-22
云南大学学报(自然科学版)(2022年4期)2022-08-03
——缺陷度的算法研究
条码与信息系统(2022年3期)2022-07-05
汽车电器(2022年6期)2022-07-02
农业工程学报(2022年5期)2022-06-22
水土保持学报(2022年3期)2022-05-26
成都信息工程大学学报(2021年5期)2021-12-30
成都信息工程大学学报(2021年5期)2021-12-30
