
基于PLC 的智能物流控制系统模拟设计
2022-01-20 09:10:12蔡婷婷
农业装备技术 2021年6期
蔡婷婷,蔡 雪
(江苏省联合职业技术学院 镇江分院,江苏 镇江 212006)
0 引 言
互联网的高速发展,给人们的生活带来了很多便捷,网购物品的需求量也在不断加大,从而对企业或仓库中货物的提取、搬运和运输工作提出了更大的挑战[1]。本设计通过三菱PLC 来实现智能物流过程的控制,从而达到准确、快速和安全的物流过程,大大提高了工作效率,降低了劳动强度。
1 智能物流控制系统简介
1.1 智能物流控制系统的组成
智能物流控制系统由一个3×3 货架、二位运动机构、铲斗、变频器驱动的传送带、称重传感器等组成[2]。
二维运动机构X 轴运动由步进电机M3 拖动,步进电机主轴用联轴器与丝杆连接;二维运动机构Y 轴由伺服电机M4 拖动,伺服电机主轴与丝杆连接(步进电机和伺服电机速度根据实际控制要求给定);铲斗伸缩电机M1 为双速电机,传送带电机M2由变频器驱动,其示意图如图1 所示。
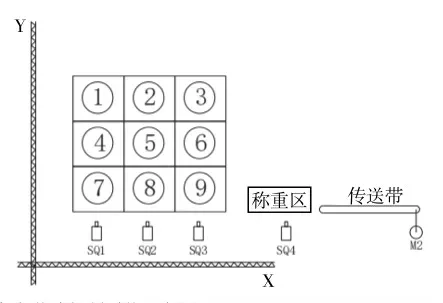
图1 智能物流控制系统示意
1.2 智能物流控制系统的流程
当操作人员需要取出存储在3×3 货架上任意一个区域的货物时,二维运动机构带动铲斗运动,到达指定位置,电机驱动铲斗伸出将货物取到后回缩。铲斗取到货物后二维运动机构即带动铲斗将货物送达称重区,称重后再由传送带电机送至指定地点[3]。
2 智能物流控制系统设计
2.1 智能物流控制系统具体工作过程
工作前,先检查二维运动部件是否在原点位置,如果X 轴方向不在原位,则“原位指示”不亮,系统不能启动运行,直至按下“复位”按钮后,步进电机以1 r/s 的速度驱动二维运动机构正转回原。回到原点后(原点位置在称重区位置,即SQ1 被压下)电机停止,“原位指示”灯亮,系统可以启动。
点击3×3 货架任一位置,此处灯变绿,表示需取该位置货物。
(1)二维运动机构先运行X 轴到达相应位置,步进电机先以1 r/s 的速度反转驱动,达到选择位置后步进电机停转。
(2)步进电机停止后,伺服电机正转驱动二维运动机构Y 轴到达选择的货架位置。
(3) 二维运动机构X 轴、Y 轴都到达相应位置后,M1 电机低速正转驱动铲斗伸出,当铲斗伸到最前面时(SA1 转向左侧)电机停转,等待2 s 后M1 电机高速反转驱动铲斗后缩;当铲斗缩到最后面时(SA2 转向左侧)电机停止完成取货。
(4)完成取货后二维运动机构按照先Y 轴后X轴的顺序回到原点(称重区),回到称重区后停止5 s开始称重。
(5)用控制柜内部0~10 V 电压源来模拟称重传感器,设称重传感器的检查单位是0~200 kg,称重完成后显示当前货物质量。
(6)称重完成后,M2 电机以30 Hz 频率驱动传送带带动货物向右端传送,运行5 s 后电机停止完成本次货物传送工作、此时相应选中位置的灯由绿色变为原色。
(7)取货工作可反复进行。
(8)在取货过程中,HL1 以1 Hz 频率闪亮,取货结束后灭。
2.2 PLC 的选用以及具体的地址分配
本系统采用三菱系列FX3U-48M 型PLC 作为主控元件,货物的质量变化是一个模拟量,因此,选用模拟量模块fX3U-4AD 对其进行输入输出控制[4]。fX3U-4AD 连接在FX3U 可编程控制器上,通过特殊功能模块,可以获取4 通道的电压/ 电流数据的模拟量,也可以把各通道指定的电压输入、电流输入、A/D 转换值保存在4AD 的缓冲存储区(BFM)中,通过数字滤波器的设定,可以读取稳定的A/D 转换值。各通道中,最多可以存储1 700 次A/D 转换值的历史记录。根据设计的控制要求,分配PLC 的输入、输出地址,如表1 所示。
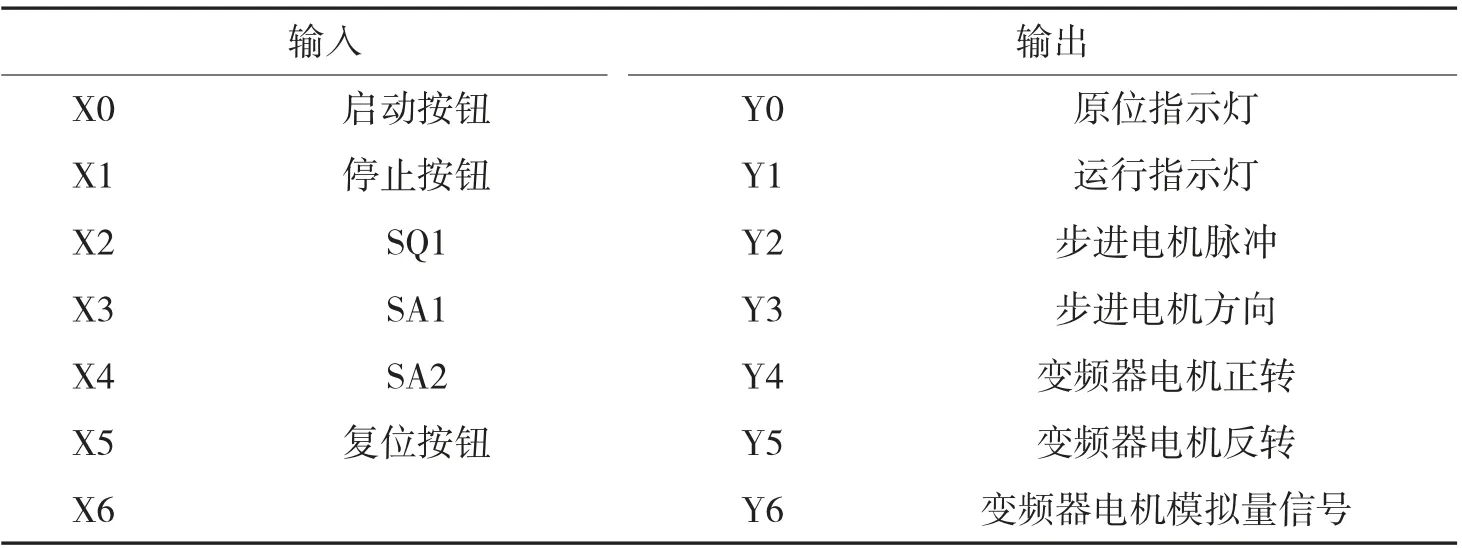
表1 I/O 地址分配表
2.3 PLC 的部分程序设计
(1)要完成智能物流的功能运行,PLC 控制首先要保证运动部件在原点位。设计程序如图2 所示。

图2 初始原状态检测复位梯形图
进行检测,如果在原点位,Y0 得电,原点位指示灯亮,置位块S10,进入可运行状态。如不在原点位,置位S20, 按下复位按钮,X5 得电,Y2 得电,X 轴步进电机运行,到达原点位,X2 得电,Y0 得电,电机停止,置位S10,进入空运行状态。
(2)数字量和模拟量的转换,是PLC 控制系统一个重要关键点,设计程序如图3 所示。
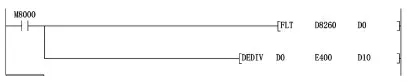
图3 称重采集梯形图
PLC 得电,将采集来的数字量放入数据寄存器D8260 中,FLT 指令将D8260 整数值数据转换成二进制浮点数(实数)值后,寄存在[D0 D1] 中,通过浮点除指令DEDIV, D0 中的值除以E400,结果保存在D10 中,根据需要再从D10 中读取数值。
3 结 语
随着现代自动化技术及信息技术的高速发展,为实现物流运输管理的更高效率,本项目使用三菱FX3U-48MR PLC 做为主控制器进行控制,运用FX3U-4AD 模拟量模块,使得对物品的分类更精准,运行更便捷更高效,从而减少了人工的劳动强度,节约了运输时间和成本。
猜你喜欢
高中数理化(2024年8期)2024-04-24 16:58:14
中学生数理化·高一版(2021年1期)2021-03-19 08:30:02
微特电机(2020年11期)2020-12-30 19:42:32
测控技术(2018年12期)2018-11-25 09:37:42
电子制作(2018年17期)2018-09-28 01:57:00
通信电源技术(2018年3期)2018-06-26 06:33:36
电子制作(2016年21期)2016-05-17 03:53:12
工业设计(2016年6期)2016-04-17 06:42:53
电测与仪表(2015年11期)2015-04-09 11:46:30
铁路通信信号工程技术(2014年5期)2014-02-28 16:57:49
