基于模糊PID控制的烘干房温度控制设计*
2022-01-19 08:33:44郝文彬冯天玉黄世明程捷朱望武
中国农机化学报 2021年12期
郝文彬,冯天玉,黄世明,程捷,朱望武
(1.湖北工业大学机械工程学院,武汉市,430068;2.武汉市红之星农牧机械有限公司,武汉市,430000)
0 引言
随着国家经济水平的不断提高和人民生活水平的提高,人民对于猪肉类食品的需求量也在逐年攀升[1]。我国的养猪行业也由以前的农村散户的模式转化为集中、专业化、集团规模化模式。规模化的养殖不仅可以将生猪的养殖集中化管理,而且提高了生猪的生产效益,并降低了养殖周期。同时,对预防疾病的传播,也逐步完善了一系列措施。对于非洲猪瘟的影响,各个企业都引起对消毒烘干的重视,烘干房得以快速发展起来,烘干房对于温度有特别高的要求,要求其房内温度保持在一定温度区间和时长,这就需要系统去进行加以控制。目前传统的PID控制精度难以满足条件需求,所以提出了模糊PID的自适应模糊控制算法[2-3],能够对采集的信息实时进行优化[4],反应迅速,确保烘干房内的温度保持在设定的范围,在其温度范围内达到烘干消毒的目的。
本设计是针对大型运输生猪汽车烘干房系统,以烘干房内的温度为控制目标,设计了基于模糊PID控制算法,在工作过程中实时的优化PID参数,使房内温度得到更好地控制。
1 烘干房的物理模型
在实际的生产工作中烘干房如图1所示,由保温墙体、送风系统、回风系统、加热系统等组成。地面是C20混凝土工艺,厚度50 mm,保温墙体采用的是泡沫保温材料,厚度为150 mm,加热热系统是高温型直燃烘干机,功率是80 kW,同时内置一台送风机,风量为3 500 m3/h,回风系统采用直径300 mm圆形管道。整体烘干房的结构尺寸为12 m×5 m×4.8 m。

图1 烘干房实物图Fig.1 Drying room physical drawing
由于烘干房体积较大,为保障快速升温,提高烘干的效率,故采用6个相同的高温型直燃烘干机,烘干房体积较大,温度不均匀性比较突出,所以前期先行对烘干房结构模型进行了温度分部均匀性进行了优化,优化其结构,在对其进行温度控制设计。烘干房内布置了温度监测点,交叉符号是温度监测点,分布如图2。

图2 温度监测点Fig.2 Temperature monitoring point
温度监测点分布在烘干房两侧墙壁上,一侧墙壁上①—⑩的点,在另一侧墙壁上也有10个监测点,总共20个监测点,具体位置参数见表1。最终的采集温度值为这些温度监测点的平均值作为输入值。对整个烘干房烘干系统进行简化,简化后系统如图3所示。

表1 监测点位置参数Tab.1 Location parameters of monitoring points
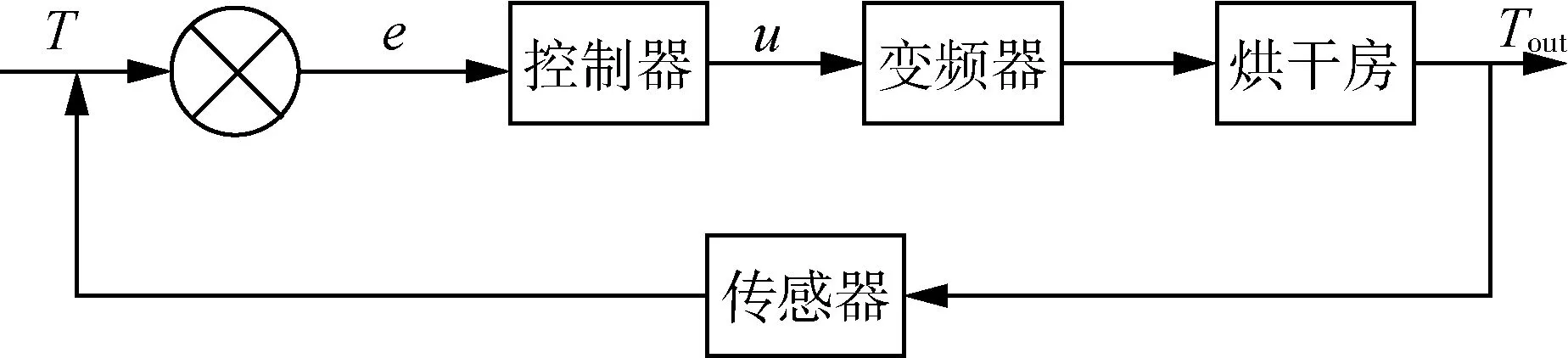
图3 烘干房控制系统结构图Fig.3 Control system structure of dryingroom
T是设定的目标温度值,Tout是烘干房实际温度值为输出值,在输入控制器;控制器对比目标温度T和实际温度Tout,求出温度差e和温度变化率ec[5],在对其进行模糊推理,得到PID控制参数,运算输出u,再将u输送变频器[6],变频器控制直燃烘干机的输出功率,从而达到控制烘干房内部温度的效果。
2 硬件设计
该烘干房硬件系统的组成有SIMATIC S7-200PLC、EM235输入模块、EM222输出模块、SIMENS TP277显示屏,如图4所示。系统流程如图5所示。
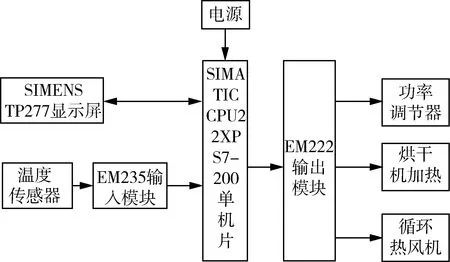
图4 控制系统硬件图Fig.4 Hardware diagram of control system
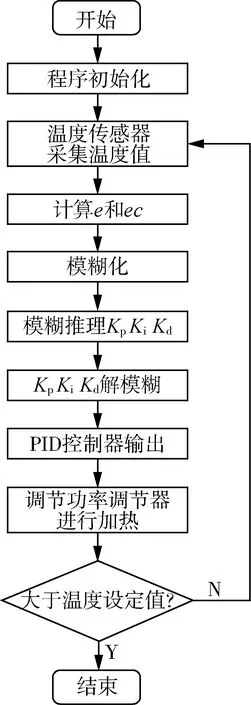
图5 系统流程图Fig.5 System flow chart
系统主控模块:选择是西门子S7-200主控模块CPU22XP,输入量为14数字,输出数字量10个配有2个RS485通讯接口,可连接最大扩展接口7个。
输入模块:温度传感器要把采集的温度信息模拟量传入到主控模板,控制系统选用EM235,其为4路模拟量输入,输出信号为电压或电流信号。
输出模块:输出指令经输出模块以输出数字信号控制加热烘干机和功率调节器、循环热风机,选用EM222,其为8路继电器输出型。
人机接口设备:选用SIMENS TP277显示屏,与S7-200 PLC连接,能实现操作人员方便进行参数设定。
执行机构:主要有功率调节器、烘干机、循环热风机。温度采集出入主控模板,经过分析通过输出模块发出指令,烘干机进行加热工作,随着烘干房内温度与设定温度差值减小,功率调节器开始调节加热功率,减少能耗,当温度达到设定温度循环热风机开始工作,对生猪运输汽车进行热风循环吹干。
3 模糊PID控制设计
模糊PID算法主由两部分组成,一部分是PID控制器,一部分是模糊控制器,模糊控制器以温度误差e和误差变化ec作为输入量[7],利用模糊规则对PID控制器的参数Kp、Ki、和Kd进行整定,使被控对象保持在较好的动态和静态稳定情况[8]。其模糊自适应PID方框图如图6所示。
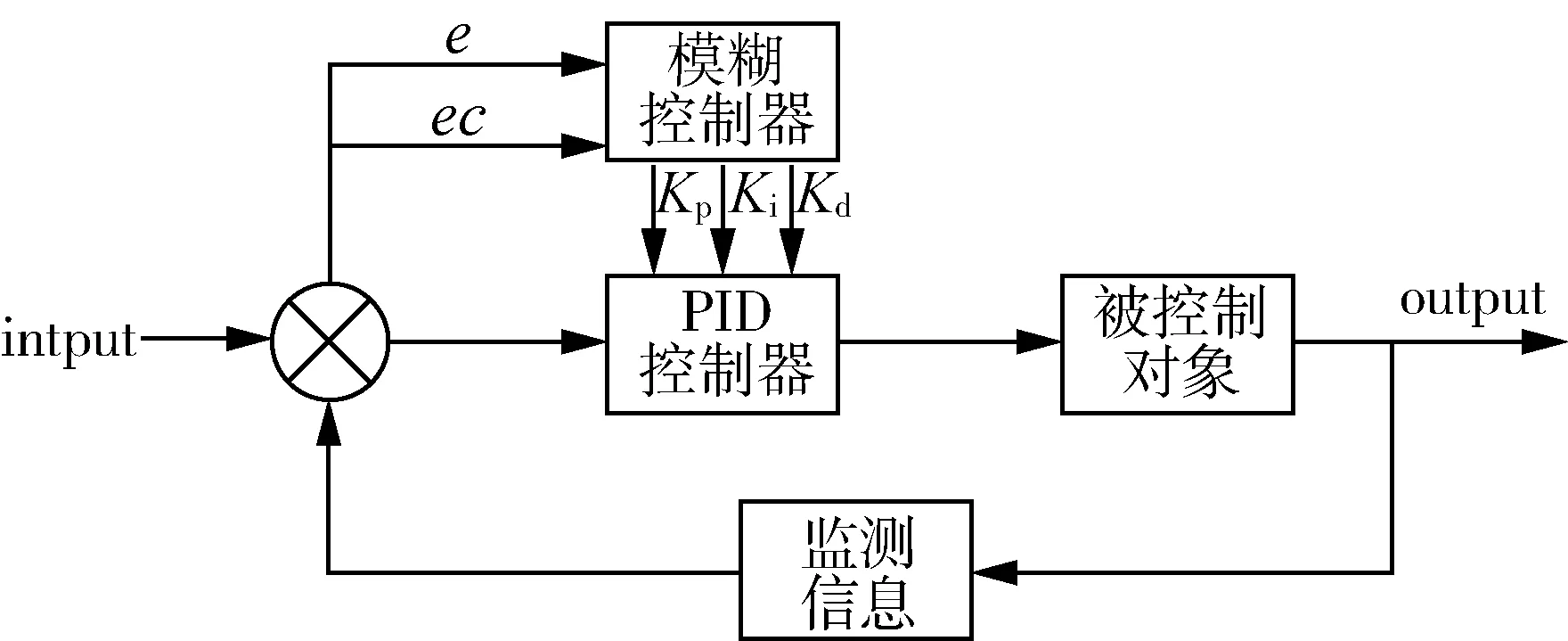
图6 控制工作原理Fig.6 Working principle of the control
3.1 PID控制器
PID控制器(比例-积分-微分控制器)是工业控制应用常见的回路部件,控制器把收集数据与参考值进行比较,然后把差值作为新的输入值,新的输入值得目的就是让系统始终维持在参考值范围内。PID控制器算法如式(4)所示。
(1)
式中:u(k)——输出;
e(k)——输入即偏差值;
T——采样周期;
Ti——积分时间;
Td——微分时间。
3.2 模糊控制器
3.2.1 模糊化处理及隶属度函数确定
将温度差e和温度误差变化率ec变化范围定义为模糊集上的论域
e,ec,Kp,Ki,Kd=[-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6]
其模糊子集为
e,ec,Kp,Ki,Kd={NB,NM,NS,ZO,PS,PM,PB}
子集中元素一一对应(负大、负中、负小、零、正小、正中、正大)。
输入量为偏差e和温度偏差变化率ec,以PID参数的自整定来实现控制信号u的输出。考虑算法的简便和实用性,选择用三角形隶属度函数作为输入和输出变量的模糊隶属度函数[9]。
3.2.2 给定语言变量赋值表和建立模糊控制规则
根据迷糊子集在语言变量论域确定规则,选取NB,NM,NS,ZO,PS,PM,PB作为语言变量e,ec,u语言变量值,其论域元素(-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6),e,ec,Kp,Ki,Kd的赋值表如表2~表4所示。
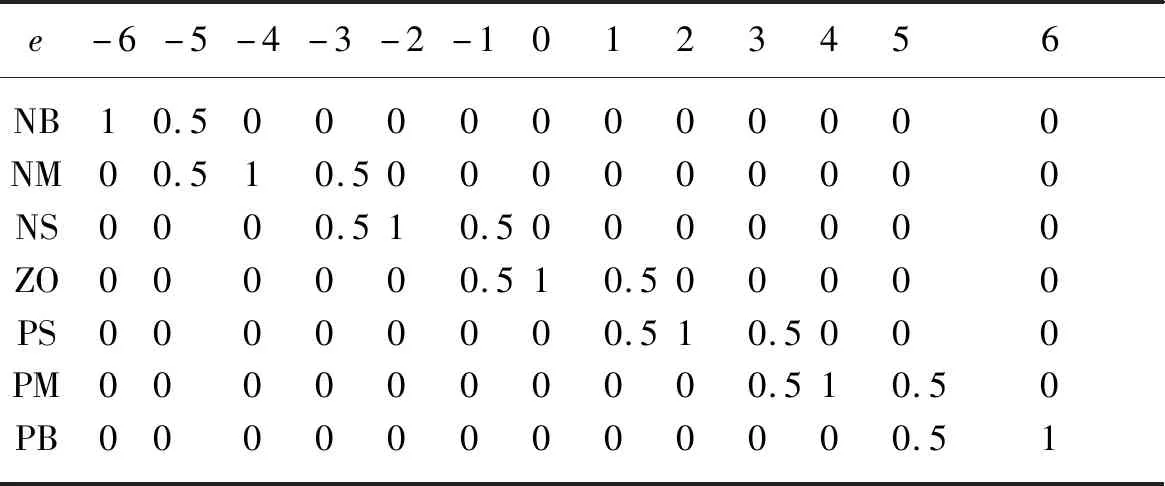
表2 语言变量e赋值表Tab.2 Language variable e assignment table

表3 语言变量ec赋值表Tab.3 Language variable ec assignment table
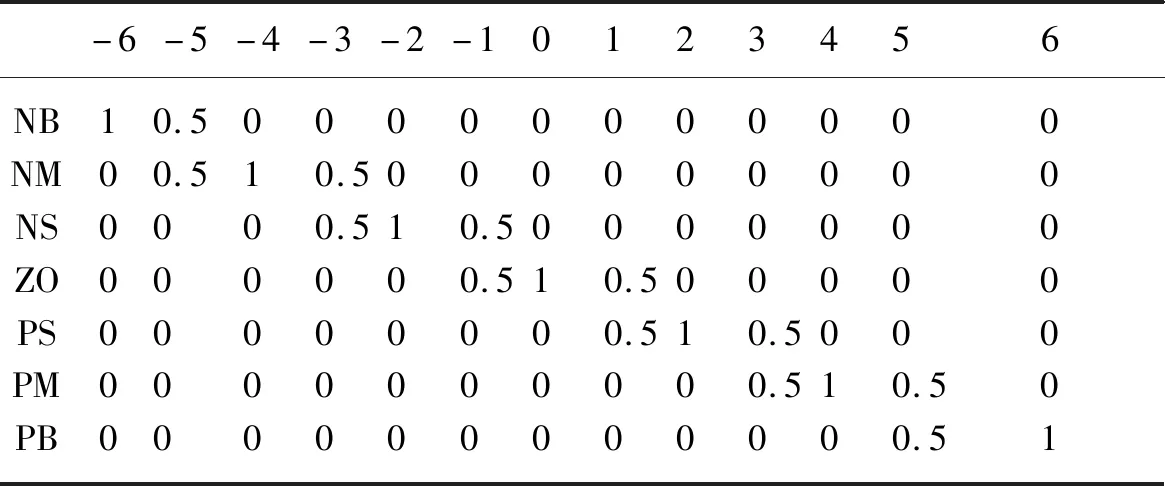
表4 语言变量Kp、Ki、Kd赋值表Tab.4 Language variable Kp、Ki、Kd assignment table
依据Kp、Ki、Kd对系统输出影响的特性,总结出对不同情况e和ec变化,参数Kp、Ki、Kd的自整定原则[10]。(1)对于偏差较大的情况,为加快系统的响应速度,同时避免偏差瞬间变大而引起微分饱和超出控制的范围[11],应选取Kp较大值和Kd较小值。另外为避免积分饱和,一般取Ki=0。(2)在偏差的变化在中等大小时,为达到系统具有较小的超调量和特定的响应速度,Kp应取较小值[12]。在这种情况下,Kd对系统影响很大,应取较小值,Ki应选取适当的值。(3)在偏差变化较小的情况下,为使系统有很好稳定性,Kp、Ki的值应取较大一些,为减小响应值的振荡,应恰当选取Kd[13]。规则是:当偏差变化小时,Kd取大值,当变化较大时,取小值。根据自整定规则,建立合适的e、ec、Kp、Ki、Kd的模糊规则控制表如表5~表7[14]。
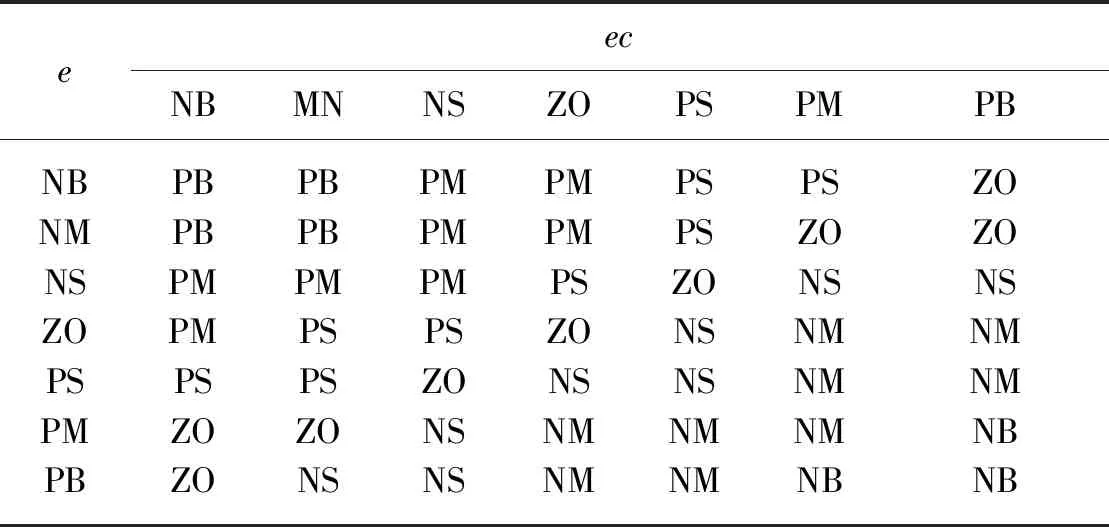
表5 Kp的模糊规则控制表Tab.5 Fuzzy rule control table of Kp

表6 Ki的模糊规则控制表Tab.6 Fuzzy rule control table of Ki
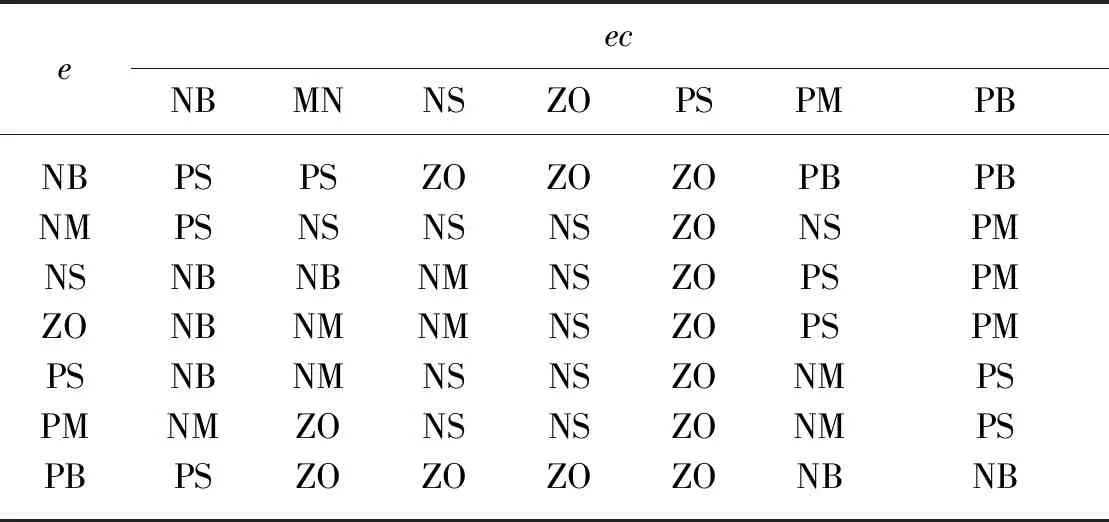
表7 Kd的模糊规则控制表Tab.7 Fuzzy rule control table of Kd
Kp-Ki-Kd系数调教参数控制曲面如图7~图9。

图7 Kp系数调教参数控制曲面图Fig.7 Surface diagram of Kp coefficient adjustment parameter control
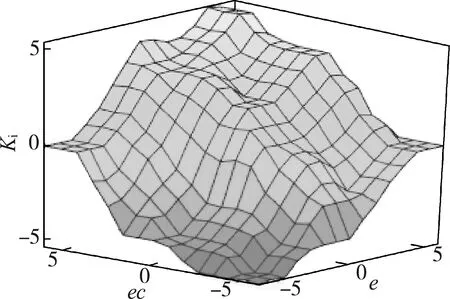
图8 Ki系数调教参数控制曲面图Fig.8 Surface diagram of Ki coefficient adjustment parameter control
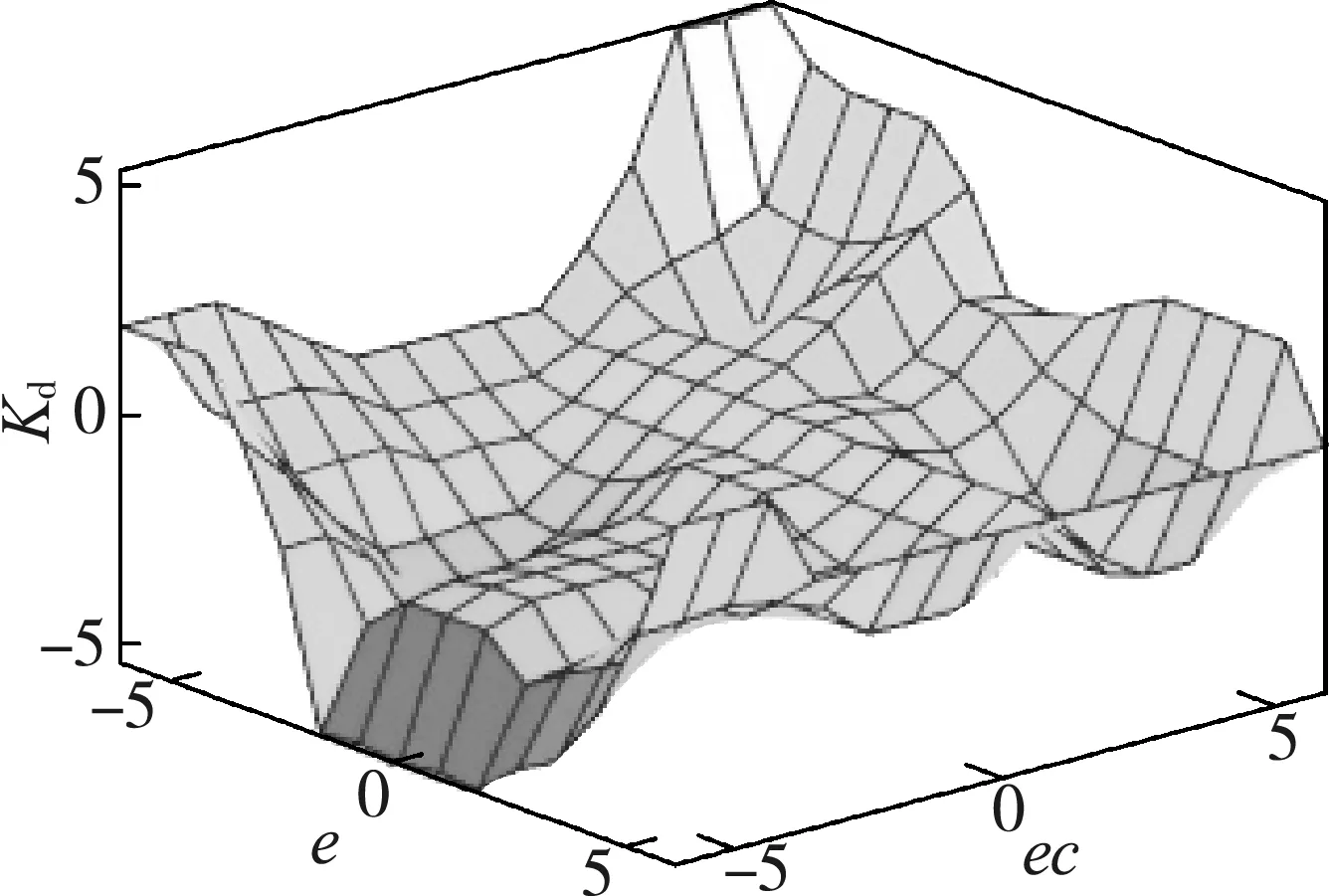
图9 Kd系数调教参数控制曲面图Fig.9 Surface diagram of Kd coefficient adjustment parameter control
3.2.3 解模糊化
去模糊化有3种方法,分别是最大隶属度、重心法和加权平均[15]。本设计选取重心法对控制器的模糊输出进行反模糊化,求出各个模糊化系数的增量,将得到的反模糊化值乘以比例因子,最终转化为实际论域的变化量。
4 仿真测试试验
为有效地控制烘干房内温度,需对系统进行仿真试验,建立被控制系统的传递函数。运用的是阶跃响应来识别系统的方法。对烘干房进行加热达到某一稳定值后,控制加热功率使其保持稳定,记录烘干房的温度上升曲线一直到达稳定值,提取数据并保存。导入Matlab工具箱中进行识别模型。选用一阶惯性环节纯滞后模型对系统识别,烘干房的数学模型如式(2)所示。
(2)
根据以上模糊控制规则和烘干房的数学模型,基于Matlab的 Simulink创建烘干房温度模糊PID控制系统模型,如图10所示。

图10 模糊PID控制系统模型Fig.10 Fuzzy PID control system model
模拟烘干系统设定目标温度是70 ℃,假设烘干房的初始温度是0 ℃,得到PID控制和模糊PID控制仿真结果如图11所示。可以发现:从室内初始温度达到设定温度70 ℃ 中,PID控制方案下超出设定温度约7 ℃,超调量比较大;而模糊PID控制达到70 ℃后,系统保持其设定温度,系统保持稳定状态,而且到达稳定所用的时间明显缩小,结果表明模糊PID控制精度高,系统超调量小。
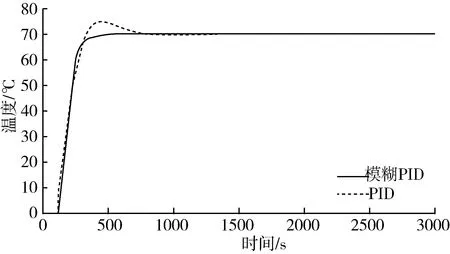
图11 仿真响应曲线图Fig.11 Simulation response curve
5 试验与结果分析
为了验证模糊PID控制相对于PID控制具有优越性,对该设计系统进行对比试验,对比试验采用相同烘干房,其外部环境因素均相同,设置相同温度目标值为70 ℃,初始环境温度为21 ℃,每隔60 s记录一次烘干房内当前的温度。在系统运行到960 s时,开启烘干房的前后门进行扰动,开门持续时间为240 s。全部试验的数据图形如图12。
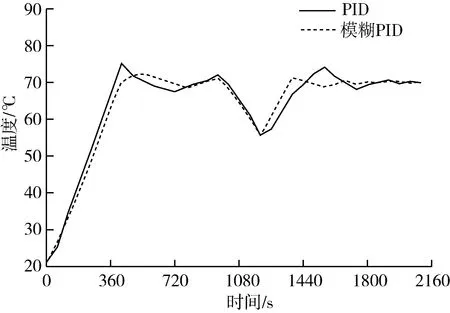
图12 对比试验Fig.12 Comparison test
模糊PID控制,在时间420 s达到温度目标值,超调量为3.5%,其调节时间420 s,到达温度设定值,一直趋于稳定状态;而PID控制在时间380 s达到目标值,但其调节时间为720 s超调量为7.3%。在加入干扰系统后,模糊PID控制比PID控制调节时间少用240 s。从整个烘干房温度控制效果来看,模糊PID控制更具有稳定性,控制温度差值更小,反应更迅速。
6 结论
生猪运输汽车烘干房是非瘟防疫中十分重要的环节,而对于烘干房内温度这一参数,提出设计模糊PID温度控制系统。目的在于准确控制烘干房内温度,减少能源损耗。
1)经过仿真试验,可以看出模糊PID控制系统相对于PID控制系统,具有较小超调量,控制精度高。对于具有非线性和时变等特点的不确定模型,模糊PID具有非常好的控制作用。
2)由试验数据处理可以看出:经过模糊PID参数自我整定,温度的惯性和滞后性有了较大改善,在温度升到目标温度,仅比目标温度高2.5 ℃,而且在受到外界干扰条件下,反应速度快,相对于PID控制,达到稳定状态节省了180 s。
猜你喜欢
厦门大学学报(自然科学版)(2022年4期)2022-07-15 08:58:40
煤气与热力(2022年4期)2022-05-23 12:44:56
水利水电科技进展(2021年6期)2022-01-07 02:58:02
现代装饰(2020年7期)2020-07-27 01:27:50
水电站设计(2020年4期)2020-07-16 08:23:48
运筹与管理(2019年10期)2019-12-17 06:07:12
电子制作(2018年16期)2018-09-26 03:26:50
西藏科技(2016年9期)2016-09-26 12:21:37
湖南畜牧兽医(2016年3期)2016-06-05 08:37:55
现代农业装备(2015年4期)2015-12-15 01:00:38