面向养殖水体分布差异的COD光谱法检测研究*
2022-01-19 08:33:16管理李精伟梅松李东波吕晓兰
中国农机化学报 2021年12期
管理,李精伟,梅松,李东波,吕晓兰
(1.南京理工大学机械工程学院,南京市,210094;2.农业农村部南京农业机械化研究所,南京市,210014;3.江苏省农业科学院农业设施与装备研究所,南京市,210014)
0 引言
水产养殖已经成为我国发展最快的食品产业行业之一,为保障食品供给、促进经济增长做出了巨大贡献。随着社会对食品安全以及环境问题的关注,国家也越来越重视水产养殖业的污染问题,并且提出了水产健康养殖的发展理念。面对养殖水质检测与监测的巨大发展前景和市场需求,我国在线检测设备制造商逐渐增加,技术水平也逐年提升。
当前,国内外水质参数检测比较成熟的方法主要有:传统化学法、电化学法、原子光谱法和分子光谱法[1-2]。其中传统化学法是当前最为成熟和可靠的分析方法,具有检测误差低、重复性好、可解释性强等优点,能够实现多数水质参数的检测,但是缺点也较为明显,例如检测成本高、周期长、流程复杂和化学废液难以处理等[3-4]。电化学法是借助样本液中溶质的电化学性质来测定相关物质的浓度,具有灵敏度高、可解释性强、选择性好、可与多源检测方法联用等优点,但是电极寿命较短需进行定期更换,致使设备存在较高的维护成本[5-6]。原子光谱法是检测水样微量金属元素浓度的重要方法之一,是总汞、总铬、总锌、总铅和总锰等水质指标的国家推荐检测方法,但是较差的通用性(常作为单一元素的检测方法),和较复杂的预处理限制了其在水质多参数检测中的应用场景[7-8]。分子光谱法是利用不同物质分子结构对电磁辐射的选择性吸收效应,相较于传统的化学分析法,具有速度快、无污染(无需化学试剂)、操作简单、费用低廉等显著优点,作为一种绿色检测技术适用于自动在线水质检测设备,代表了未来水质监控的发展方向[9-10],但是现阶段分子光谱法检测精度波动大,泛化能力薄弱,严重制约了分子光谱法的技术开发和市场应用拓展[11-12]。
与此同时,有机物污染是我国水污染的主要问题,所以本文以COD[13-14]为研究对象,以研究可靠性高、性能稳定、无污染、体积小的在线COD检测设备为目标,基于分子光谱法,探索“检测设备结构方案”和“面向水体分布差异的对抗训练网络模型”,为提升水质有机物在线检测精度,提供一套较为完整的解决方案。
1 在线水质参数检测设备
1.1 光学设备选型
在本研究中选用氘卤灯作为UV-Vis光源。通过调研确定了目前市场上应用较好的两个光学仪器产品,分别为闻奕光电的DH2000和复享光学的IDH2000-BSC,经过各项工作参数间对比和其他配件的选型建议,决定选用复享光学IDH2000-BSC作为UV-Vis光源。
光谱仪又称为分光仪,是将成分复杂的光分解为光谱线的科学仪器。完整的光谱仪主要由光学平台和检测系统组成。考虑到该光谱仪应用领域为水质检测,其波长探测范围应至少覆盖200~800 nm波段,且波长分辨率应尽可能高以便于获取细粒度水样光谱信息。参考市面上现有光谱仪产品,符合要求的有两款,分别为闻奕光电的PC2000和复享光学的PG2000-Pro。两款光谱仪参数指标相近,但是复享光学通过差分优化,使得产品在紫外波段有更高灵敏度,这符合水质检测的实际需求。因此,综合考虑产品差异与光源选型意见后,决定选用复享光学PG2000-Pro作为本研究光谱仪。
1.2 检测设备结构方案
对于检测室而言,检测室是采集UV-Vis光谱与荧光光谱时暂存水样的容器,其结构设计应满足:(1)参比切换。UV-Vis光谱检测时,需通过参比水样获取光源原始光谱来计算待测水样的吸光度。因此,检测室在设计时需考虑特定容器存放蒸馏水作参比。(2)光程切换。基于朗伯—比尔定律[15]可知,光束通过溶液的吸收程度与光程长度成正比,因此,可适当增加或减小光程,使溶液吸光度等比放大或缩小,以便于极低浓度或极高浓度溶液的参数测量。经过市场调研,发现当前市面上并没有满足该类要求的产品,因此综合考虑检测室需求,设计检测室结构示意图如图1所示。
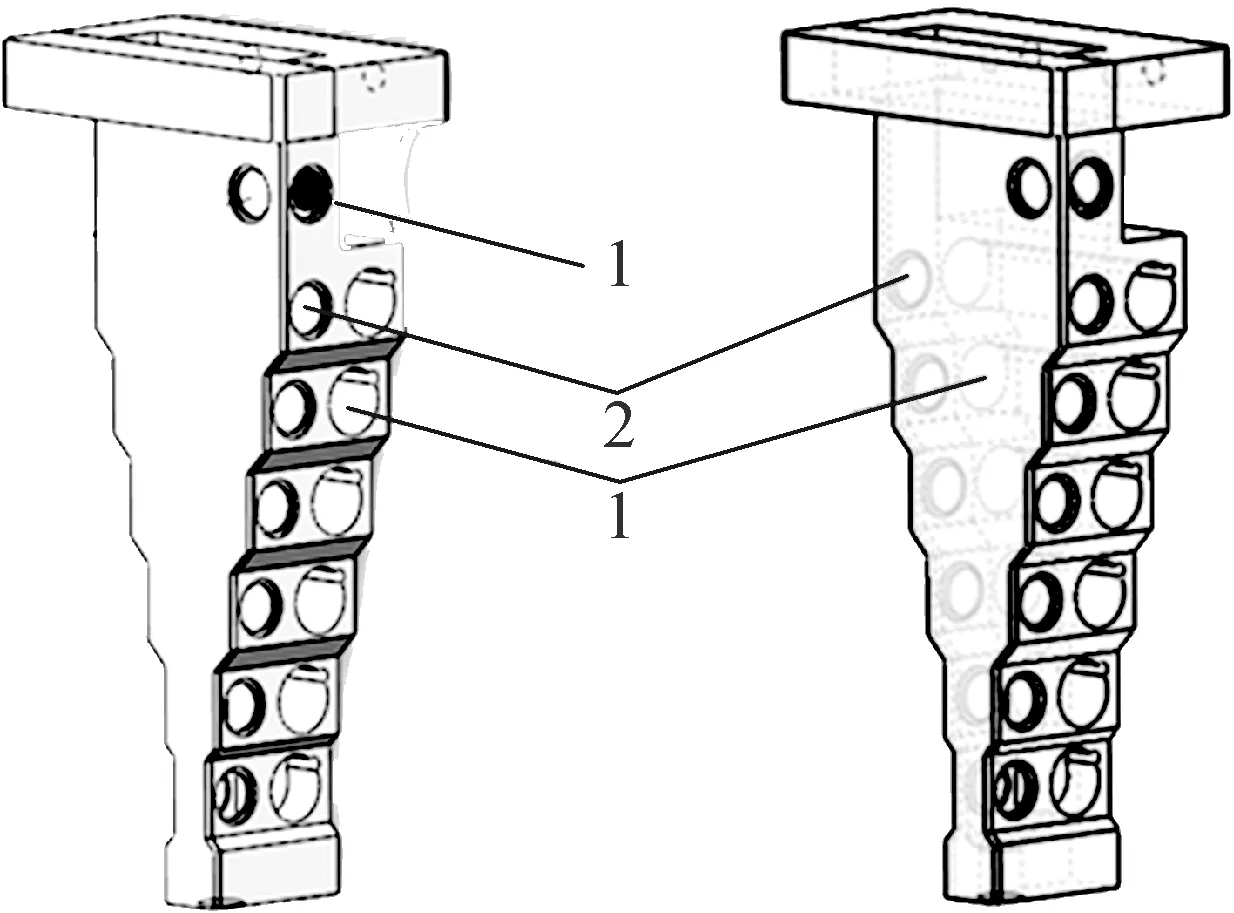
图1 检测室结构示意图Fig.1 Schematic diagram of testing room structure1.参比投射孔 2.水样投射孔
检测室主体是阶梯型水槽,材质为不锈钢,多排梯度型结构均服务于UV-Vis光谱采集:不同梯度间光程不同,可进行多光程切换,且每个梯度上均开有水样投射孔与参比投射孔,用于获取固定光程的UV-Vis光谱。水样光谱采集时,光谱仪先记录参比光强,再记录同层的水样光强,依吸收度计算公式扣除背景数据后,可得UV-Vis光谱图。
对于传动结构而言,实现检测室的移动控制是实现双光谱检测的核心。设备材质为铝合金,采用双坐标轴方式实现平面移动,同时采用步进电机带动丝杆的传送方式,精确控制移动距离,确保光路不被遮挡。该传动结构示意图如图2所示。

图2 传动结构示意图Fig.2 Schematic diagram of transmission structure1.丝杆 2.步进电机 3.底架 4.光杆 5.连接板 6.滑块
竖直方向的丝杆传动结构由一个平板底架、一根丝杆、两根光杆、一个滑块、一个连接板和一台步进电机组成。其中平板底架用于固定竖直方向传动设备以确保垂直度;两根光杆固定在平板底架上,作为滑块导轨以确保结构强度和平行度;连接板用于连接滑块与检测室;步进电机则安装在底架顶端,转轴直接与丝杆连接。最终实现:当电机转动时,转轴连同丝杆旋转,带动滑块上下移动的同时连接板带动检测室一同移动。水平方向的丝杆传动结构同理。
对于定位结构而言,其材质为铝合金,作用是将光源、光谱仪和检测室等设备固定在所需位置,同时增强设备整体刚度,其结构设计应关注:准直镜与光源出口之间的同心度;准直镜与检测室对应检测孔间的同心度。基于上述需求,设计定位结构示意图如图3所示。
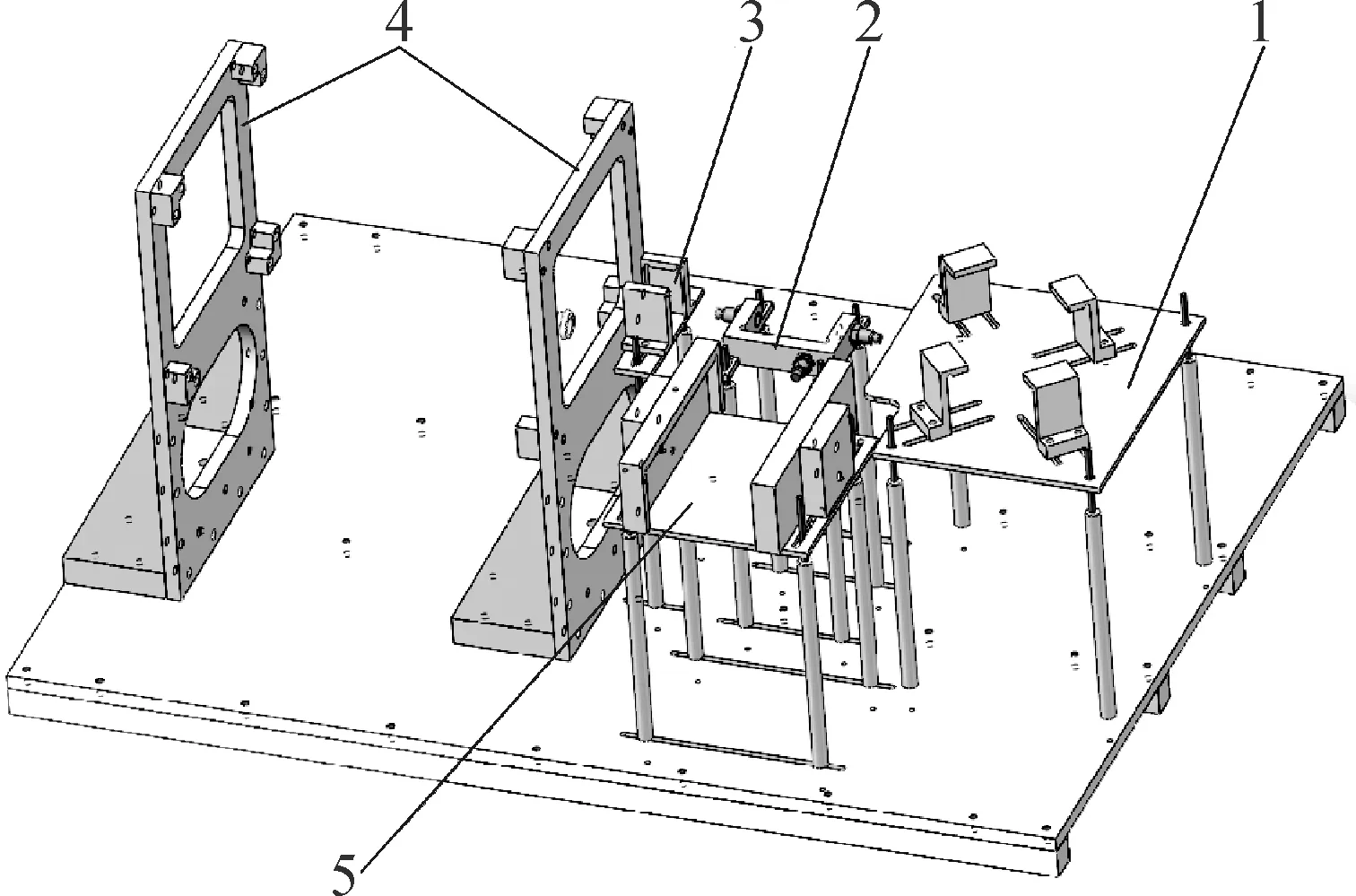
图3 定位结构示意图Fig.3 Schematic diagram of positioning structure1.光谱仪定位架 2.光纤准直镜定位架 3.衰减器定位架 4.氘卤灯定位架 5.激光器定位架
光纤准直镜定位架是U型结构,位于四个支撑立柱上,结构左侧、右侧和外侧均开有螺丝通孔,用于安装光纤准直镜,该定位架在竖直方向位置精度通过立柱高度保证。其中左侧准直镜用于接收氘卤灯光源,右侧准直镜用于接收水样UV-Vis光谱。衰减器定位架、激光器定位架以及光谱仪定位架均采用底板支撑、两侧或四周加紧的方式来固定设备,竖直方向定位精度通过支撑立柱高度保证。由于氘卤灯光源体积和重量较大,考虑到稳定性,无法使用四立柱进行支撑,因此采用铝合金板件作为固定支撑,且在光源上下表面使用直角型零件支撑。
1.3 检测设备硬件集成
将上述检测室结构、传动结构和定位结构进行集成,结合UV-Vis光源与光谱仪尺寸,确定检测设备硬件结构。检测设备尺寸为420 nm×370 nm×500 nm,UV-Vis光源与检测室光路间接有海洋光学的衰减器,衰减量固定为10 db,光谱仪中积分时间设置为1 000 ms,光谱采集系统为Morpho V3.0。通过电力驱动,运行流程由控制电路和工控机共同完成,具体流程如图4所示。
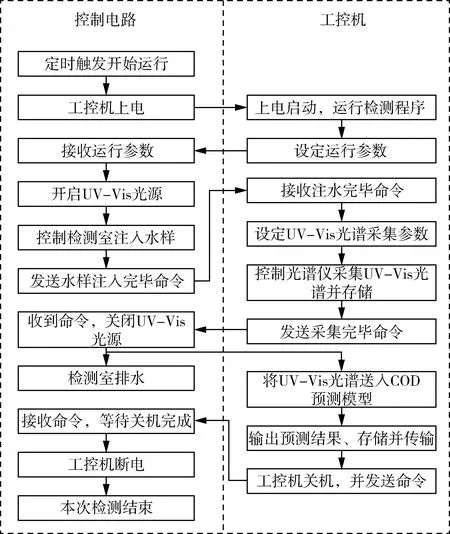
图4 检测设备运行流程图Fig.4 Operation flow chart of testing equipment
2 面向水体分布差异的对抗训练网络模型
目前多数在线COD检测设备中的预测模型,均以训练集与测试集独立同分布为前提假设,而我国幅员辽阔,水系众多,水体间差异显著,使得有限的水样数据难以体现出真实的水体分布情况[16-17]。因此,当目标域(检测地水体)与源域(现有样本库)分布存在差异时,由源域得到的低误差模型常在目标域上表现下滑[18-19]。
域适应核心是找到源域和目标域之间相似性,并利用相似性将在源域中获得的知识应用于目标域,即把分布不同的源域和目标域数据映射至相同特征空间中,使得其在该空间的距离尽可能近,从而在特征空间中对源域训练的目标函数也可以迁移至目标域上,以降低模型在目标域的误差[20]。应用在域适应问题中的深度学习方法被称为深度域适应,其思想是用深度神经网络对齐源域与目标域特征空间的数据分布,与传统方法相比,深度域适应方法获得的特征不仅有更强的泛化能力,还有更好的可迁移性[21]。
针对两域(源域与目标域)分布差异导致的模型表现下滑问题,结合深度域适应理论,本文提出面向UV-Vis光谱的水质参数域对抗训练网络(DAUVwpNet)。该网络架构除了参照域对抗的思想,还包含面向水质检测场景的特征提取器和域分类器。
2.1 特征提取器
本文所用特征提取器如图5所示。特征提取器由3部分组成,分别如图5中虚线框所示。主干网络借鉴VGG-16网络的前6层卷积、3层最大池化作为特征提取器;之后连接全局平均池化层以获取各通道特征图的平均信息值;最后通过注意力机制计算每张特征图权重,获取输出特征。利用全局平均池化层输出Qc和“广播”机制层Uc相减,能反映出各通道中的细节信息,如峰值与奇异值;再将细节信息通过sigmoid激活函数,归一化至(0,1)之间以获取各特征图权值,与Uc乘积后的信息记为增强特征部分;最后与Uc相加使得背景信息也能体现在模块输出Xc中。引入注意力机制[22]的作用为:不同通道表征的光谱信息的价值存在差异,对于数据级融合检测模型的贡献不一,将每个通道特征图与其对应权值相乘,借助损失函数在反向传播的梯度使网络能够自动选择有效特征图,实现特定区域选择的自适应。

图5 特征提取器Fig.5 Feature extractor注:Xk为输入特征图;Qc为全局平均池化层输出信息;Uc为“广播”机制层;Sc为sigmoid处理后的张量(中间量);Ac为归一化处理后的输出张量(中间量);Xc为输出特征图。
结合上述原理,可知特征增强模块以UV-Vis光谱为输入,通过卷积架构进一步提取抽象特征,并耦合注意力机制以强化特征信息,再将强化的特征信息与本模块主干网络提取的特征图相加后获得的新特征图作为输出。
2.2 域分类器
本文所用域分类器如图6所示。域分类器由归一化层,卷积层,全局最大池化层,全连接层和LReLU与Sigmoid激活函数构成。定义:域分类器的输入为I,即原始UV-Vis经特征提取器后的特征表达;域分类器的最终输出记为F,F∈(0,1),并记源域标签为0,目标域标签为1。首先将特征图输入至归一化层与非线性激活函数LReLU提升非线性表达;再经过2层卷积层进行特征抽取;并由全局最大池化层转为一维特征向量N;最后由全连接层和非线性激活函数Sigmoid,输出数值F。结合上述原理,可知域分类器以UV-Vis光谱多层抽象后的特征表达为输入,并以0到1之间的数值为输出,数值越接近0则越倾向于源域判别,反之倾向于目标域判别。

图6 域分类器Fig.6 Domain classifier
3 试验与分析
考虑到水样的运输环境与化学消解所需时间,采集点大多设为周边水域地表水,有:前湖、秦淮河、玄武湖、三桥湿地公园、溧水河、羊山湖、胥浦河和孟家岗。共计采集了972组,光谱采集是在实验室环境下的光谱仪进行,已扣除背景与参比光谱,且可视为无震动干扰;水质COD的测量是基于消解后的分光光度法获取,可视为水样指标的实测值。但由于个别采集点位置靠近,使得部分水样光谱完全重叠,无法提供信息增益的,因此,去除掉高度重叠的样本后,剩余有效样本数为569组。先按投影相关性对所有样本的分布一致程度进行排序,设计样本间投影相关性计算公式如(1)所示。
proji_j=projj_i=0.5[(i·j)/‖j‖2+
(i·j)/‖i‖2]
(1)
式中:(i·j)/‖j‖2——样本i在样本j上的投影;
(i·j)/‖i‖2——样本j在样本i上的投影;
‖·‖2——2范数。
之所以设计为彼此投影之和是为了满足交换率proji_j=projj_i。再依序将前300组样本划为“源域”样本集,后269组样本划为“目标域”样本集,即最大化两集合样本分布差异;随后在源域样本集中按均匀分布不放回的抽取出200组样本作为源域训练集,剩余100组作为源域验证集,在目标域样本集中按照均匀分布不放回的分别抽取出150组作为目标域训练集和50组作为目标域验证集,剩余69组作为目标域测试集。
设定模型初始化权重为服从正态分布N1(0,0.01)的随机数,偏置项为0。设定最大训练周期为200,学习率为0.001,提前终止阈值为5,源域与目标域训练集的批尺寸分别为20和15,优化器类型为带有momentum的SGD,momentum值为0.9。本次训练DAUVwpNet在第179个epoch,触发提前终止判断,结束参数训练,验证集上误差稳定在0.27上下小范围波动。同时以特征提取器部分和水质参数预测器部分串联构成基准网络,仅基于源域样本集进行模型训练,其他参数设置不变,本次训练基准模型在第96个epoch,触发提前终止判断,结束参数训练,源域验证集上误差稳定在0.16上下小范围波动。
固化DAUVwpNet和基准模型参数,利用目标域测试集对模型做评估,对COD预测效果如图7所示。图中实测值为养殖水体中COD的实际含量数值,预测值为模型基于水样光谱对COD含量的预测结果。

图7 DAUVwpNet和基准模型在目标域测试集的COD预测效果Fig.7 Performance of DAUVwpNet and benchmark on COD prediction
总体来说DAUVwpNet和基准模型对目标域上COD预测均存在一定误差,但DAUVwpNet误差低于基准模型,DAUVwpNet预测MSE=0.78;DAUVwpNet预测值与实测值间相关系数为0.95;基准模型预测MSE=0.85;基准模型预测值与实测值间相关系数为0.89。
4 结论
针对目标域(检测地水体)与源域(现有样本库)分布存在差异时,传统COD在线检测设备预测精度降低的问题,本文借助深度学习理论和域对抗训练思想,耦合水样UV-Vis光谱特性,提出了面向养殖水质COD指标的域对抗训练网络:DAUVwpNet。该模型运用域分类器与特征提取器之间的对抗思想,将源域与目标域特征空间的数据分布进行了对齐,为提升在线COD检测设备的鲁棒性提供了可能。试验表明:面向同一批测试数据,DAUVwpNet的预测误差为0.78,低于传统模型的预测误差(0.85);DAUVwpNet预测值与实测值间相关系数为0.95,高于传统模型的相关系数(0.89)。因此,面向目标域COD指标,本文所提DAUVwpNet相较于传统在线COD检测模型具有更高的检测精度和泛化性。
猜你喜欢
计算机技术与发展(2024年3期)2024-03-25 02:10:02
计算机技术与发展(2020年11期)2020-12-04 07:50:46
辐射防护通讯(2019年3期)2019-04-26 05:16:26
绿色科技(2018年24期)2019-01-19 06:36:50
意林(儿童绘本)(2018年10期)2018-11-08 11:01:36
光学精密工程(2016年6期)2016-11-07 09:08:20
光学精密工程(2016年5期)2016-11-07 09:06:10
电子与信息学报(2015年12期)2015-08-17 11:14:42
安徽工业大学学报(自然科学版)(2014年4期)2014-07-11 01:45:56
河南科技(2014年11期)2014-02-27 14:09:42