
果园开沟深度宽度监测装备设计与试验*
2022-01-19 08:33周馨曌坎杂蒙贺伟戚江涛赵旭洋李亚萍
中国农机化学报 2021年12期
周馨曌,坎杂,蒙贺伟,戚江涛,赵旭洋,李亚萍
(1.石河子大学机械电气工程学院,新疆石河子,832000;2.绿洲特色经济作物生产机械化教育部工程中心,新疆石河子,832000)
0 引言
近年来,我国水果种植业得到了迅速的发展,水果成为中国继粮食和蔬菜之后的第三大农作物[1],截至2018年底,我国水果种植面积达11 874.93 khm2[2]。随着林果种植面积的增加,果园管理机械的市场需求不断增大,为了满足市场需求,相关农业机械取得了快速的发展[3],其中果园开沟机成为人们的重点关注对象之一。
机械化开沟作业不仅能够缩短工作周期、减少人工成本、降低人工劳动强度,同时高质量的开沟作业还是保证果树保质增产的重要举措[4-6]。但在开沟作业过程中,若开沟机械的作业参数不能达到标准,则会对果树施肥效果、果树生长效果以及果品品质造成影响。传统的开沟作业质量参数数据的采集主要是通过人工测量开沟深度、开沟宽度等指标,但这种方法存在效率低下、工作量大、测量精度低、实时性差等问题,因此,农业机械监测系统对提高农业智能化自动化水平具有重要意义。
目前,国内外学者针对农业机械监测系统进行了相关的研究,Xiang等[7]开发了一款AMR11和GNSS的农业机械运行状态实时监测系统,能够实时显示和储存位置坐标、作业区域以及工作路径,计算出现场总面积、工作速度、实时工作面积等参数信息。Wang等[8]提出了一种农业机械监控调度系统,实现了农业机械数据的实时采集和远程实时监控调度。Grevisjames等[9]设计了一种拖拉机性能监视设备,该监视设备可以实时监测拖拉机的地面速度,牵引杆拉力,车轮滑移,燃料消耗和发动机转速等参数。Singh等[10]研制的主耕设备数据监测系统,可实现对三点联动力、地面速度、耕作深度、油耗、前进速度、滑移、发动机转速、液压和流体温度等参数的测量。卢腊[11]设计了基于LabVIEW的联合收割机田间作业状态监测系统,实现了六路转轴扭矩/转速的监测,并具备关键部位视频监测的功能,系统稳定性高,转速测量结果相对准确。吴宝山[12]研制了播种机作业状态监测系统,搭建了播种机作业状态判别算法,实现了对播种机作业工况的远程监测与数据管理。刘碧贞等[13]研制了谷物收割机作业综合管理系统,实现了机械地理位置、收割面积等数据的采集,以及作业轨迹和产量分布的绘制,系统产量测量误差小,性能稳定。从以上学者的研究可以发现,智能化农机作业监测系统对于提高农业机械作业质量、降低人工成本、提升农业机械智能化水平具有重要意义,同时也为本系统的开展提供了参考依据。
为解决开沟作业过程中存在的开沟深度、开沟宽度人工监测工作量大、实时性较差等问题,本文结合相关学者的研究,研制了果园开沟深度宽度监测装备,该装备搭建了果园开沟深度宽度监测平台,开发了果园开沟深度宽度监测系统,实现开沟深度、开沟宽度、作业时间等参数的实时监测、计算、显示与保存,为果园开沟作业质量的实时监测奠定了基础。
1 装备总体设计
为了实现开沟深度、宽度数据的实时采集、显示与保存,本装备主要由果园开沟深度宽度监测系统及果园开沟深度宽度监测平台组成。其中监测系统由Arduino单片机下位机数据测量系统与LabVIEW上位机人机交互系统组成,主要实现了数据的实时监测、显示与保存;结合开沟作业特点,对监测平台装置结构进行设计,为监测系统提供安装平台,最终完成果园开沟深度宽度监测装备的功能与设计。监测装备总体结构如图1所示。

图1 监测装备总体结构Fig.1 Overall structure of monitoring equipment
2 果园开沟深度宽度监测平台设计
由于在开沟作业过程中,开沟机机架、刀盘及导流罩作业灰尘较大,开沟机作业现场测量环境较为恶劣,若超声波传感器安装在机架及刀盘附近,会导致测量数据误差较大,系统监测性能降低等问题。
为了降低作业过程中灰尘对监测系统性能的影响,本文设计了果园开沟深度宽度监测平台,实现对地形的仿形功能,并为监测系统提供安装平台。该装置主要由机架、控制盒、挂接节点、配重、传感器平衡装置等组成,其结构如图2所示。

图2 果园开沟深度宽度监测平台结构示意图Fig.2 Structural diagram of orchard ditching depth and width monitoring platform1.配重 2.机架 3.挂接节点 4.控制盒 5.传感器平衡装置
控制盒用于安装果园开沟深度宽度监测系统下位机系统;挂接节点用于连接牵引绳,使监测平台与开沟刀盘机架相连接,实现开沟作业过程中监测平台与开沟机一同前进;配重用于防止车速较快时导致监测平台侧翻;传感器平衡装置用于安装超声波传感器,该装置示意图如图3所示。为了降低地面起伏对测量结构的影响,装置在传感器平衡装置中添加了铰接结构,当果园开沟深度宽度监测平台机架倾斜时,传感器平衡装置的铰接结构由于自身重力原因,使该装置水平面时刻与地面保持平行,防止由于机架倾斜对超声波测深、测宽造成的影响。
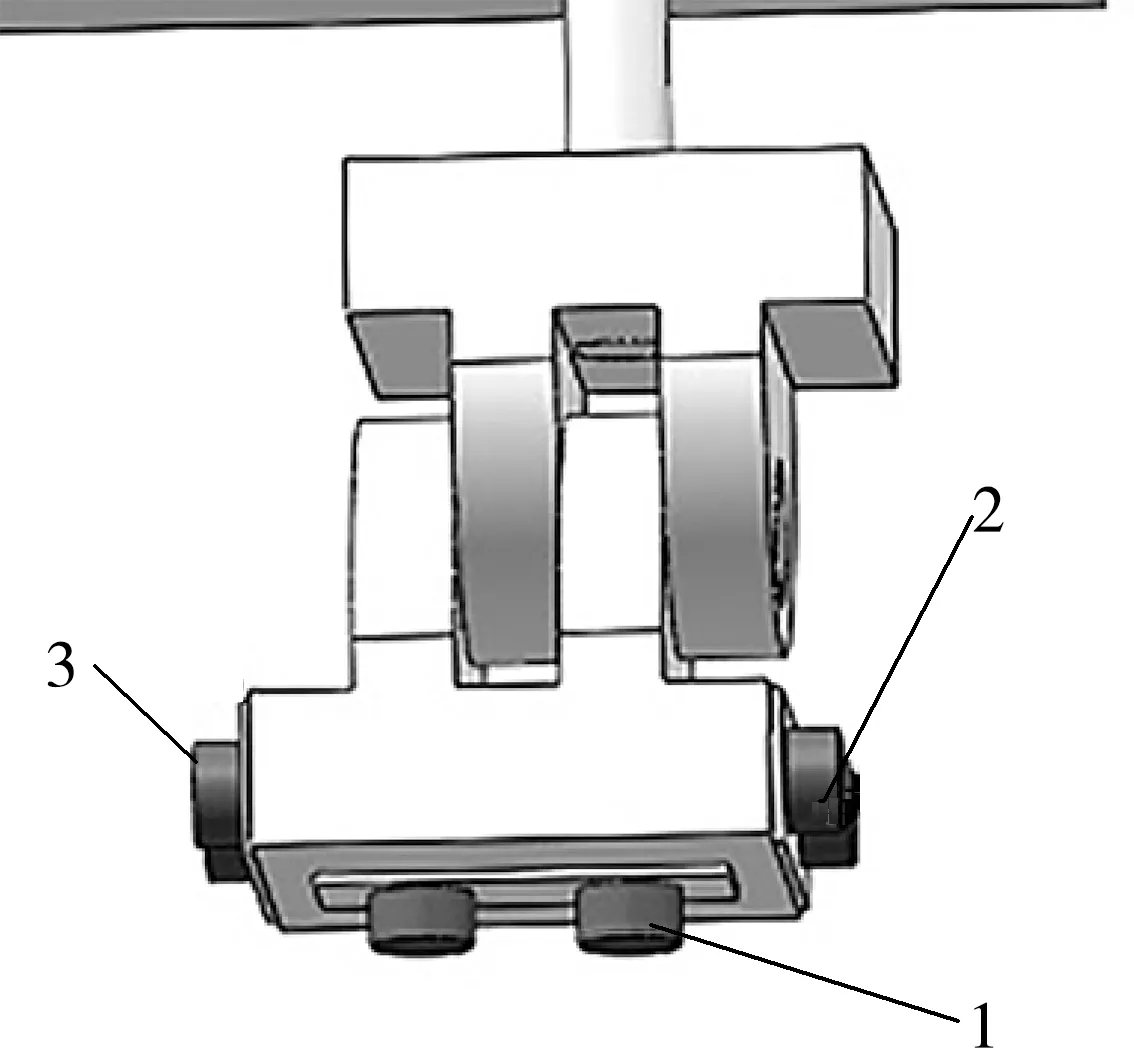
图3 传感器平衡装置结构示意图Fig.3 Structural diagram of sensor balancing device1.测深传感器 2.左侧沟宽测量传感器 3.右侧沟宽测量传感器
在对监测平台结构进行设计后,对装备的参数进行选择。在实际应用中,果园开沟宽度一般在25~35 cm,且开沟作业时,抛撒的土壤会堆积在沟的两侧,若平台宽度过窄,则平台前进时单向轮骑行在堆积土壤上,影响监测平台前进的平稳性;同时,考虑到开沟深度不同时,土壤在沟两侧堆积量和堆积高度不同,为防止监测平台距离地面距离过低,将堆积土壤刮蹭回沟内的情况,设计监测平台机架底部高度可调;同时,为了使传感器能够与沟面平行,传感器平衡装置长短可调;在对监测平台可行性进行预验证时,发现当开沟作业速度较快时,监测平台存在侧翻的问题,因此在监测平台上装备配重模块,进一步提高平台的可靠性。综合考虑以上因素,监测平台参数如表1所示。

表1 监测平台主要参数Tab.1 Main parameters of monitoring platform
3 果园开沟深度宽度监测系统设计
果园开沟深度宽度监测系统主要由Arduino单片机下位机数据测量系统与LabVIEW上位机人机交互系统组成。Arduino单片机下位机数据测量系统实现沟深、沟宽数据的采集,并将数据通过串口上传给LabVIEW上位机人机交互系统。上位机系统接收下位机数据,实现数据解算、显示及保存功能,其结构示意图如图4所示。

图4 果园开沟深度宽度监测系统总体结构Fig.4 General structure of orchard ditching depth and width monitoring
3.1 果园开沟深度宽度监测下位机系统设计
3.1.1 硬件设计
果园开沟深度宽度监测下位机系统硬件部分主要由超声波传感器、单片机及串口通讯模块组成,系统连线示意图如图5所示。其中沟深、沟宽传感器选择KS103超声波传感器,该传感器在满足快速近距探测的同时自带实时温度补偿,能够较好地满足系统需求;单片机采用Arduino Nano,该单片机尺寸小巧功能强悍,同时提供Mini-B标准的USB接口进行供电;串口通讯通过Arduino Nano单片机的USB串口通讯模块实现,主要由FT232RL芯片与MINI-USB串口组成,完成上、下位机之间的数据通讯。
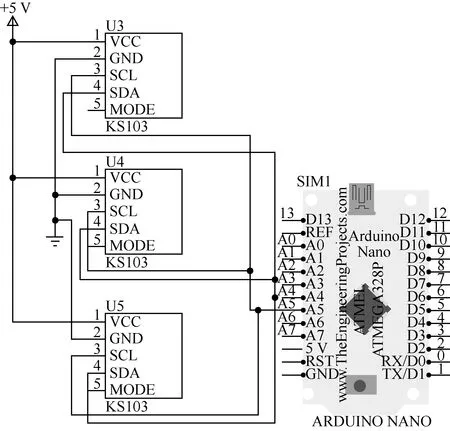
图5 下位机系统连线示意图Fig.5 Wiring diagram of lower computer system
3.1.2 软件设计
果园开沟深度宽度监测下位机系统在Arduino IDE软件中进行开发,采用C/C++的计算机编程语言对系统程序进行编写,主要实现数据测量、数据传输等功能。
超声波传感器与单片机通讯采用I2C通信模式,设置I2C地址分别为0xe8、0xfa、0xfe。其测量原理为:超声波发射装置发射出超声波,记录当前发射时间t1,当超声波遇到被测物后,回波返回发射方向,传感器接收到反射波后记录此时时间t2,时间间隔为t2-t1,结合超声波在当前环境下的传播速度v,即可计算出传感器与被测物之间距离,计算公式如式(1)所示。
S=v(t2-t1)
(1)
在实际应用中,果园开沟深度不大于40 cm,开沟作业环境温度不恒定,而超声波声速受到环境温度的影响[14-15],进而影响测量数据准确性,为进一步提高数据准确性,文中选择0xb4探测指令实现带有高精度温度补偿的距离探测,使探测值更稳定更精确。由于系统选择USB接口对系统元器件进行供电,因此降噪指令选择0x71二级降噪,超声波传感器工作流程示意图如图6所示,当系统上电启动后,对传感器寄存器进行初始化,根据监测要求设置传感器探测模式,发送数据接收指令读取寄存器数据并合成,实现深度、宽度数据的采集。

图6 超声波传感器工作流程Fig.6 Workflow of ultrasonic sensor
下位机系统工作流程如图7所示。

图7 下位机系统工作流程Fig.7 Workflow of lower computer system
通过设置状态机实现不同传感器数据的读取与传输,本文将状态机分为4个状态,其中状态0为等待状态,状态1为读取1号KS103超声波传感器数据,状态2为读取2号KS103超声波传感器数据,状态3为读取3号KS103超声波传感器数据,状态4将以上传感器数据传输至串口,通过对以上状态的循环执行,实现对开沟深度、开沟宽度等参数的实时监测与数据传输功能。
3.2 果园开沟深度宽度监测上位机系统设计
果园开沟深度宽度监测上位机系统负责接收、解析以及实时显示开沟深度、开沟宽度数据、作业时间,同时负责开沟深度稳定性的实时计算,并对以上数据进行显示及保存功能;该系统主要由用户登陆模块、参数设置模块、数据计算模块、数据库保存模块等几部分组成。
系统工作原理为:当系统运行时,首先输入用户名与密码,成功登陆密码后,对系统参数进行设置,对下位机系统传输的数据进行接收、计算、显示,最后通过Access数据库实现数据的保存,系统工作流程图及系统界面如图8所示。

(a)工作流程
数据解析部分通过设置不同的数据帧头,对下位机上传的数据进行帧头匹配,实现对3个传感器数据的识别,并从当前字符串中将有效数据剥离,供系统进行下一步处理,该部分流程框图如图9所示。
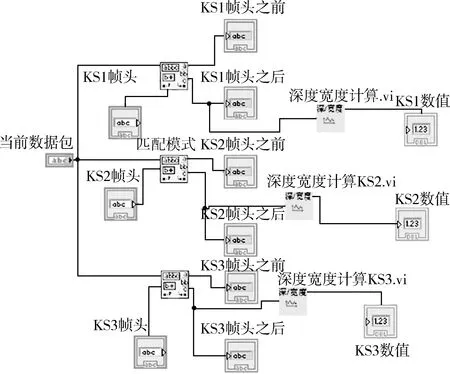
图9 数据解析程序框图Fig.9 Block diagram of data analysis program
参数设置主要包括开沟深度上限、数据帧头、通讯串口以及数据库名称。开沟深度上限的设置能够在系统计算开沟深度稳定性时,将过大的无效数据进行剔除,防止错误数据对计算结果进行干扰,其程序框图如图10所示。其原理为:当测量的沟深数据在零至开沟深度上限数值范围内时,则视为有效数据,计算开沟深度稳定性,否则视为无效数据不进行计算,其中开沟深度稳定性按照NY/T 740—2003农业行业标准进行计算。
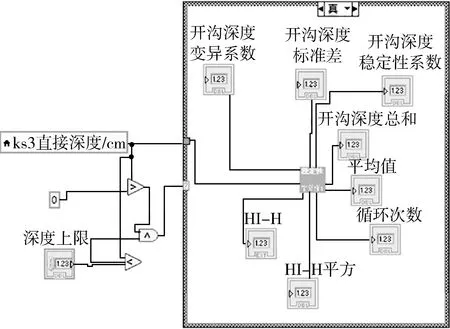
图10 开沟深度稳定性计算程序框图Fig.10 Block diagram of stability calculation program for trenching depth
数据保存通过INSERT INTO语言将监测到的数据插入到用户所选择的数据库中,该部分程序框图及数据库数据保存情况如图11所示。

(a)数据保存程序框图
4 性能测试
为了验证装备的稳定性与可靠性,试验在新疆维吾尔自治区石河子市对果园开沟深度宽度监测装备进行性能试验,试验现场如图12所示。通过开沟机对25 cm、30 cm、35 cm三个开沟深度水平进行作业,每个深度水平设置3个测量点,每个测量点取值5次,求取该测量点沟深、沟宽平均值,将实际值与系统测量值进行对比,结果如表2所示。

图12 试验现场示意图Fig.12 Schematic diagram of test site
通过表2可以看出,果园开沟深度宽度监测装备能够满足开沟作业过程中开沟深度、开沟宽度实时监测的需求,开沟深度为25 cm时其测量误差最大为 3.1 cm,开沟深度为30 cm时其测量误差最大为2.7 cm,开沟深度为35 cm时其测量误差最大为3.7 cm,开沟宽度的测量误差最大为3.1 cm,能够满足实际应用需求。
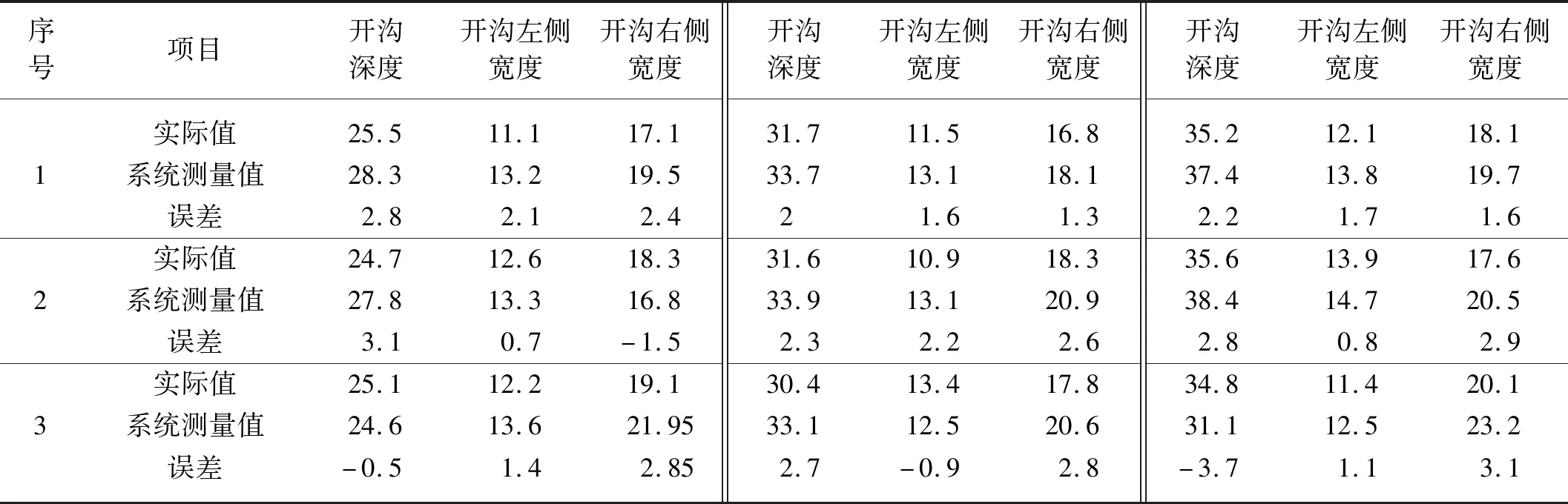
表2 性能试验结果Tab.2 Performance test results cm
5 结论
1)本文搭建了果园开沟深度宽度监测平台,开发了果园开沟深度宽度监测系统,完成了果园开沟深度宽度监测装备的设计,实现了开沟深度、开沟宽度、作业时间等参数的实时监测、计算、显示与保存,能够满足实际应用需求,为果园开沟作业质量监测奠定了基础。
2)为了降低作业过程中灰尘对监测系统性能的影响,对果园开沟深度宽度监测平台进行了设计,实现了对地形的仿形功能,为监测系统提供安装平台,并配有传感器平衡装置,降低了机架倾斜对数据测量造成的影响。
3)以Arduino Nano单片机为核心,对下位机硬件部分及软件部分进行了设计,完成了果园开沟深度宽度监测下位机数据测量系统的搭建,实现对开沟深度、开沟宽度等参数的实时监测与数据通讯功能。
4)基于下位机系统,搭建了果园开沟深度宽度监测上位机人机交互系统,通过用户登陆模块、参数设置模块、数据计算模块、数据库保存模块,通过对数据接收、解析,实现了开沟深度、开沟宽度数据的实时显示,同时负责开沟深度平均值、开沟深度标准差、开沟深度稳定性、作业时间等参数的实时监测计算、显示以及数据库保存功能。
5)通过进行田间试验表明,果园开沟深度宽度监测装备能够满足开沟作业过程中开沟深度、开沟宽度实时监测需求,开沟深度为25 cm时测量误差不超过3.1 cm,开沟深度为30 cm时测量误差不超过2.7 cm,开沟深度为35 cm时测量误差不超过3.7 cm,开沟宽度的测量误差不超过3.1 cm,实时性较好。
猜你喜欢
今日农业(2022年16期)2022-09-22
快乐语文(2021年27期)2021-11-24
中阿科技论坛(中英文)(2021年2期)2021-03-17
农机化研究(2018年8期)2018-07-10
小学生作文(低年级适用)(2017年9期)2017-10-13
中国农业文摘-农业工程(2016年5期)2016-04-12
医学研究杂志(2015年5期)2015-06-10
人生十六七(2015年5期)2015-02-28
种业导刊(2012年7期)2012-08-15
销售与市场·管理版(2009年21期)2009-09-03
