泵喷推进水下滑翔机尾舵设计及仿真分析
2022-01-19 05:17:58张建星李旭康董石榴李宝仁
数字海洋与水下攻防 2021年6期
张建星,黄 涛,李旭康,董石榴,李宝仁,杨 钢
(华中科技大学 机械科学与工程学院,湖北 武汉 430074)
0 引言
浮力驱动型水下滑翔机是通过主动调节自身浮力和姿态,来实现锯齿形轨迹的上浮下潜运动[1]。由于没有配置额外推进装置如螺旋桨等,其典型航速仅为0.5 kn左右。浮力驱动型水下滑翔机优势和劣势均比较明显,优势在于续航能力强,使用成本低,自主可控,高隐蔽性;劣势在于机动性差,航迹定位精度差,在强洋流海域观测效能低[2]。
水下滑翔机转向调节形式主要包括横滚式和尾舵式[3]。横滚式转向调节原理:通过调节水下滑翔机耐压舱体内部偏心质量块的旋转,使机身产生横滚角Φ,此时作用在附体机翼上的升力会产生水平分量,通过改变横滚姿态间接获取偏航力矩,最终实现水下滑翔机的偏航运动。在该调节过程中,水下滑翔机质心位置会发生变化,横滚和俯仰姿态具有一定的耦合作用,增加了姿态控制的难度;在具备一定横滚姿态时,平台还需要深度方向上的运动才会累积出偏航运动效果,因此不能在水平面实现转向[4]。典型横滚式水下滑翔机如Seaglider,其机动半径通常为20~30 m[5]。尾舵式转向调节原理:驱动尾舵偏转,来流作用在尾舵上的水动力合力会相对机身浮心产生一个偏航力矩M,使得滑翔机产生偏航运动[6]。在该调节过程中,机身质心位置保持固定,依靠尾舵产生的偏航力矩直接实现转向;当泵喷推进器开启时,平台依靠尾舵可实现水平面的转向。典型尾舵式水下滑翔机如 Slocum,其机动半径通常为7~10 m[5]。
面向长航程观测及定深推进观测任务需求,华中科技大学自主研制了泵喷推进水下滑翔机。与浮力驱动型水下滑翔机相比,其在艉部配置泵喷推进器,以提高平台的环境适应性。泵喷推进器工作时,平台最高速度可达2.5 kn。如图1所示,泵喷推进水下滑翔机传感器系统主要由CTD、深度计、磁罗盘、高度计等组成,功能模块主要由电池包、俯仰调节模块、浮力调节模块、通信天线、垂直尾舵、泵喷推进器等组成。泵喷推进水下滑翔机海试现场如图2所示。
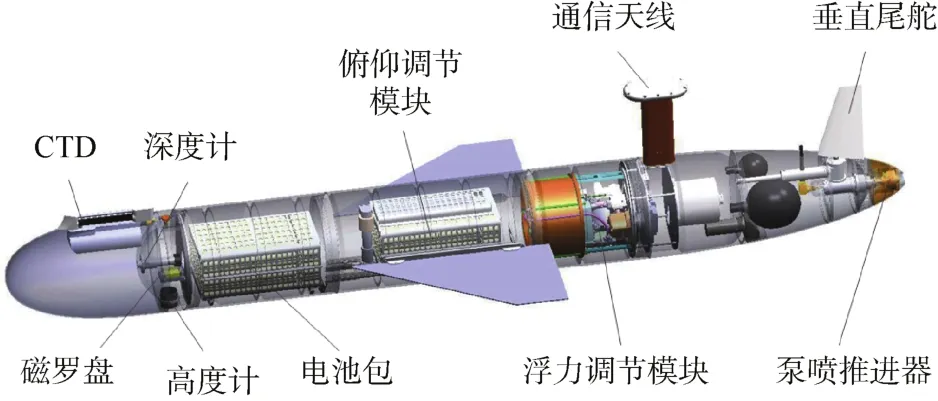
图1 泵喷推进水下滑翔机三维模型图Fig.1 3D model of pump-jet propulsion glider
图 2 泵喷推进水下滑翔机海试中Fig.2 Pump-jet propulsion glider in sea trial
本文以泵喷推进水下滑翔机作为研究对象,采用Fluent数值仿真方法针对尾舵翼型、展弦比、后掠角、舵轴位置等相关参数开展研究,完成了尾舵水动力结构设计。利用动力学仿真方法,对比分析了泵喷推进水下滑翔机与同尺度下横滚式水下滑翔机的转向性能,仿真结果表明,尾舵式结构的转向性能明显优于横滚式。
1 尾舵仿真模型说明及数值仿真方法验证
1.1 尾舵水动力参数说明
综合考虑平台附体结构及布放回收安全性等因素,本文尾舵采用上单可动舵布置形式。尾舵的剖面形状一般被称为翼型,其对尾舵的水动力性能具有重要影响。尾舵主要结构参数有:舵面积AR,舵展长h,后掠角χ,根部弦长Cr,翼端弦长Ct等,尾舵的平均弦长可以表示如下:

尾舵偏转一定角度后,来流会相对尾舵产生攻角α。为了便于分析尾舵上的流体水动力,对作用在尾舵上的水动力参数定义如图3所示。图中各参数的定义为:α为来流攻角;V为来流速度;O为水动力作用中心;C为弦长;Lv为升力,其方向与速度方向垂直;Dv为阻力,其方向与速度方向一致;水动力合力,其对舵轴的力矩MR称为铰链力矩。
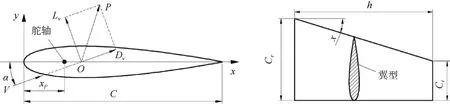
图3 尾舵翼型剖面及水动力参数图示Fig.3 Diagrams of aft rudder airfoil profile and hydrodynamic parameters
对尾舵升力Lv、阻力Dv、铰链力矩MR进行无因次化处理可以表示为
式中:CL为升力系数、CD为阻力系数、其主要受翼型、攻角等因素的影响;尾舵升阻比可以用CL/CD表示,最大升阻比是评估滑翔机尾舵水动力性能的重要指标;CMR为铰链力矩系数,其主要受舵轴位置和攻角的影响。
舵轴的位置除了对铰链力矩有影响之外,对滑翔机的偏航力矩MN也有影响。图4为尾舵偏转角度δr时滑翔机偏航示意图,偏航力矩MN可表示为
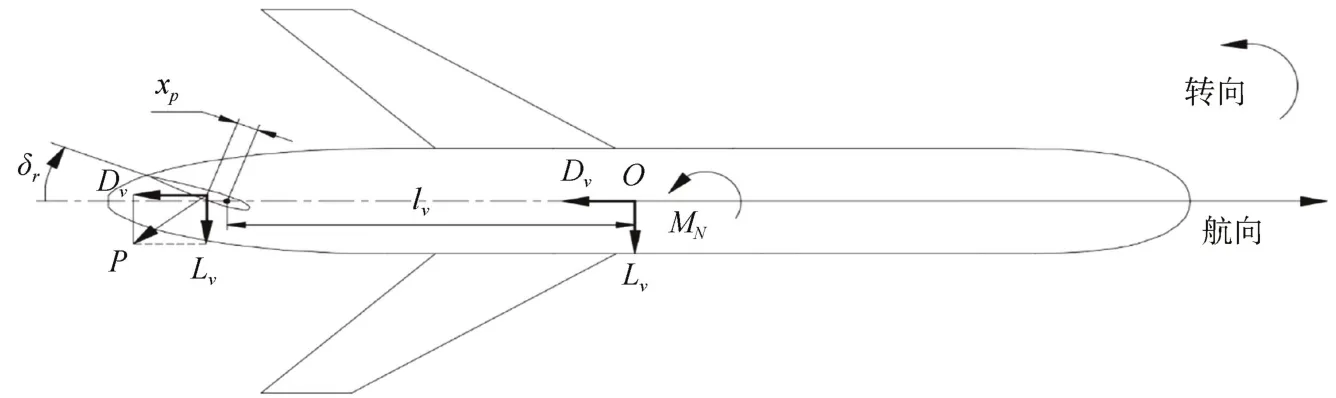
图4 尾舵偏转产生偏航力矩示意图Fig.4 Diagram of the yaw moment caused by tail rudder deflection

式中:xp为尾舵的水动力作用中心到舵轴的距离;lv为滑翔机浮心到舵轴的距离;δr为尾舵的偏转角度,滑翔机直航状态下,δr即为上述的尾舵攻角α。
水动力作用中心到舵轴距离xp比较小,且舵角δr一般在较小的范围内。所以对于滑翔机的偏航力矩MN来说,升力Lv和滑翔机浮心到舵轴的距离lv对其产生的影响是最大的。
1.2 尾舵验证模型及仿真参数设置
尾舵验证模型具体参数如表1所示。

表 1 尾舵验证模型具体参数Tab.1 Tail rudder verification model parameters
本文采用四面体非结构网格对尾舵模型进行网格划分,计算域如图5所示。计算域圆柱体直径为3h,其轴线与舵翼对称面重合,流场入口距离舵翼前端2Cr,为了让舵翼尾部的流场发展均匀,流场出口距离舵翼尾部6Cr。
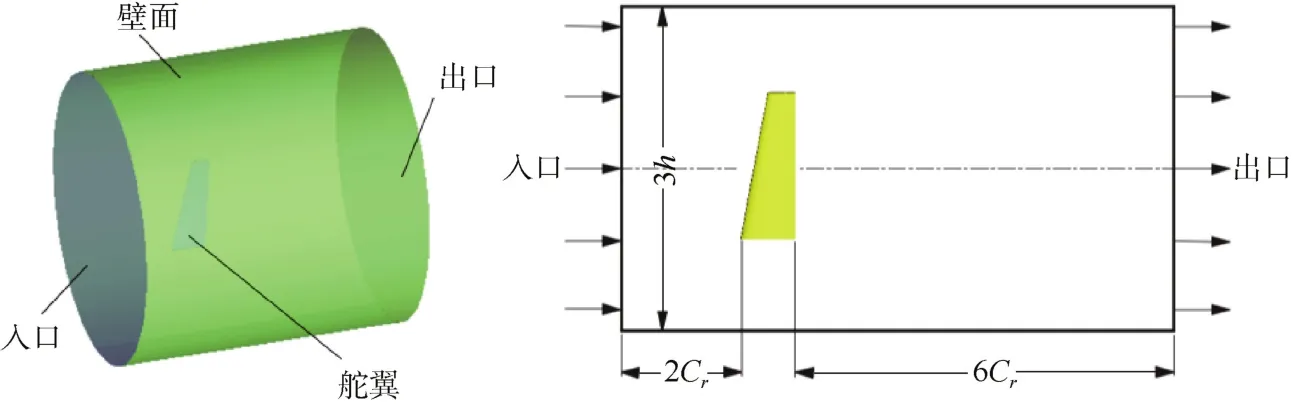
图5 尾舵验证模型计算域Fig.5 Computational domain of rudder verification model
选择 SSTk-ω湍流模型进行数值仿真计算,计算域边界条件的设置如表2所示。
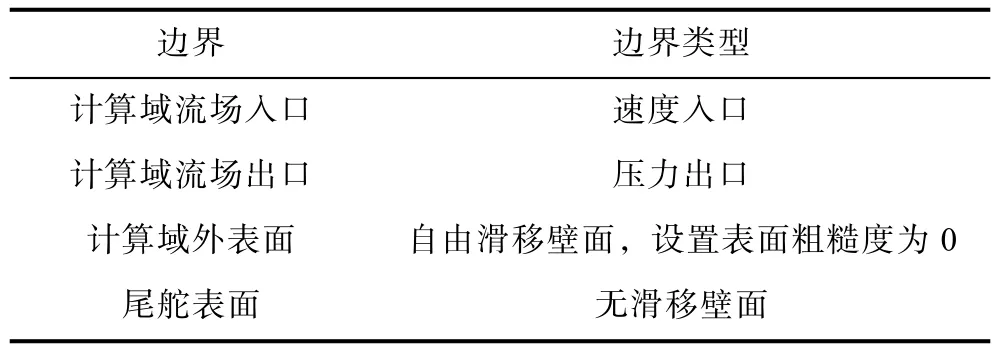
表2 仿真计算边界条件Tab.2 Boundary conditions of simulation calculation
1.3 收敛性分析
在保证数值仿真计算结果准确性的前提下,最大程度减少网格计算规模,首先进行网格收敛性分析。定义不同网格模型阻力系数的相对变化幅度Rλ如下:

式中:i=1,2,3,4,5。本文选择SSTk-ω湍流模型,该模型下不同网格数量仿真结果如图6所示。SSTk-ω湍流模型下,128万与144万2组网格相对变化幅度为0.72%,可以认为128万网格时仿真结果基本稳定。因此,网格计算规模控制在130万左右可满足仿真需求,该小节验证的数值仿真方法可以用于本文后续仿真计算。
2 尾舵参数设计及水动力性能分析
2.1 尾舵翼型分析
本文针对3种常见的对称翼型包括NACA、平板、WZF鱼尾翼型进行水动力分析,为尾舵选择合适的翼型,翼型模型如图7所示。
定义翼型升力系数与阻力系数如下:
式中:C为翼型弦长,LC与DC分别为翼型升力和阻力。各翼型弦长均取C=100 mm,分别构建NACA0012翼型、4 mm厚平板翼型以及WZF鱼尾翼型3种典型对称翼型的仿真模型,研究中鱼尾翼型厚度与NACA0012翼型保持一致。1 kn航速下,在0~20° 攻角内对以上模型进行水动力仿真,各翼型升阻比仿真结果如图8所示。
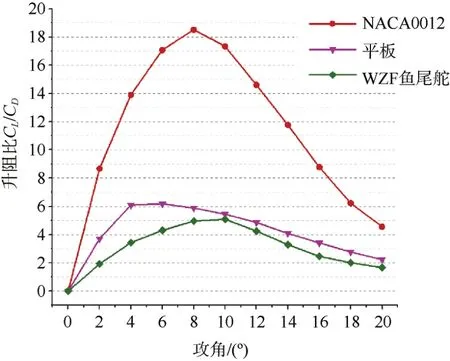
图8 各翼型升阻比仿真结果Fig.8 Simulation results of lift-drag ratio of different airfoils
仿真结果分析:各翼型升阻比均有最大值,其中平板翼型的最大升阻比所对应的攻角最小,为 5°左右;NACA0012翼型与WZF鱼尾翼型最大升阻比所对应的攻角最大,为 11° 左右。各攻角下 NACA翼型升阻比均比平板翼型和WZF鱼尾翼型大。
选取3种翼型在10°攻角时的速度云图和压力云图,如图9所示。NACA翼型在攻角较大时翼型周围流场发生分离的程度最小,而平板翼型与WZF鱼尾舵翼型背流面发生分离的程度较大,所以会在背流面产生较大的低压区,增大航行的阻力。虽然升力也随之增加,但是翼型整体的升阻比是下降的。
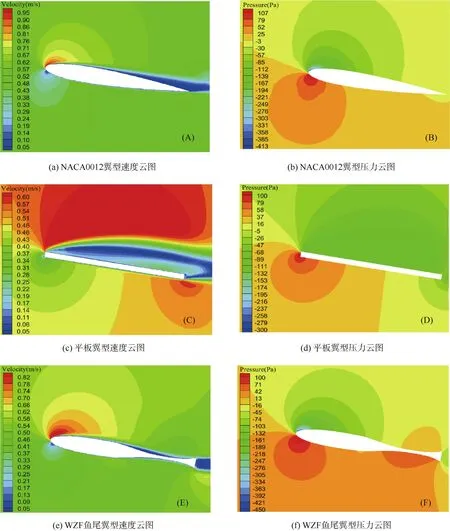
图9 3种翼型速度云图和压力云图Fig.9 Velocity contour and pressure contour of three airfoils
综上所述,在不同攻角下WZF鱼尾翼型的升力和阻力均比较大,所以其能提供较大的转向力矩,但其在0°攻角下的阻力值较大,对航行的效率会造成较大影响。平板翼型的升阻比在较小攻角下即可达到最大值,但整体升阻比过小。所以本文中所设计的尾舵选取了NACA0012翼型。
2.2 尾舵展弦比参数分析
为了研究展弦比λ对尾舵水动力的影响,选定NACA0012尾舵翼型,针对不同展弦比λ进行不同攻角下的仿真,仿真结果如图10所示。
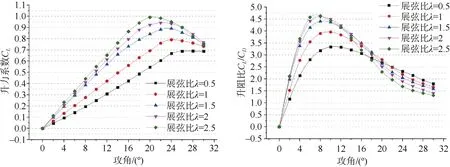
图10 不同展弦比下升力系数与升阻比Fig.10 Lift coefficient and lift-drag ratio under different aspect ratios
仿真结果分析如下:
1)面积一定的情况下,较大的展弦比λ可以提供更大的升力系数,且升力系数曲线斜率也会增加,但其临界攻角会相对较小。当展弦比λ=2.5时,临界攻角约为20°,在达到临界攻角之后升力系数下降较快。
2)展弦比越大,其对应的最大升阻比也相对较大,且最大升阻比对应的攻角较小。当展弦比λ= 2.5时,最大升阻比对应的攻角约为7°,在达到最大升阻比后,攻角继续增加,升阻比下降较快。随着展弦比λ的增加,最大升阻比增加的幅度有减小的趋势。
对于水下滑翔机来说,尾舵的展弦比λ应该控制在一定的范围内,适当的展弦比λ可以增加尾舵的升力和升阻比,提高尾舵的工作效率。若展弦比λ过大,其临界攻角较小,且当展弦比λ达到2之后,最大升阻比变化不明显;同时,展长的增加会导致尾舵在工作过程中,产生较大的横倾力矩,影响水下滑翔机的稳定性。
综合考虑,本文中尾舵展弦比λ选择2,这样可以使尾舵保持较大的升力系数和升阻比,提高水下滑翔机转向效率和航行经济性。
2.3 尾舵后掠角参数分析
保持展弦比λ=2,针对不同后掠角χ进行不同攻角下的仿真,结果如图11所示。
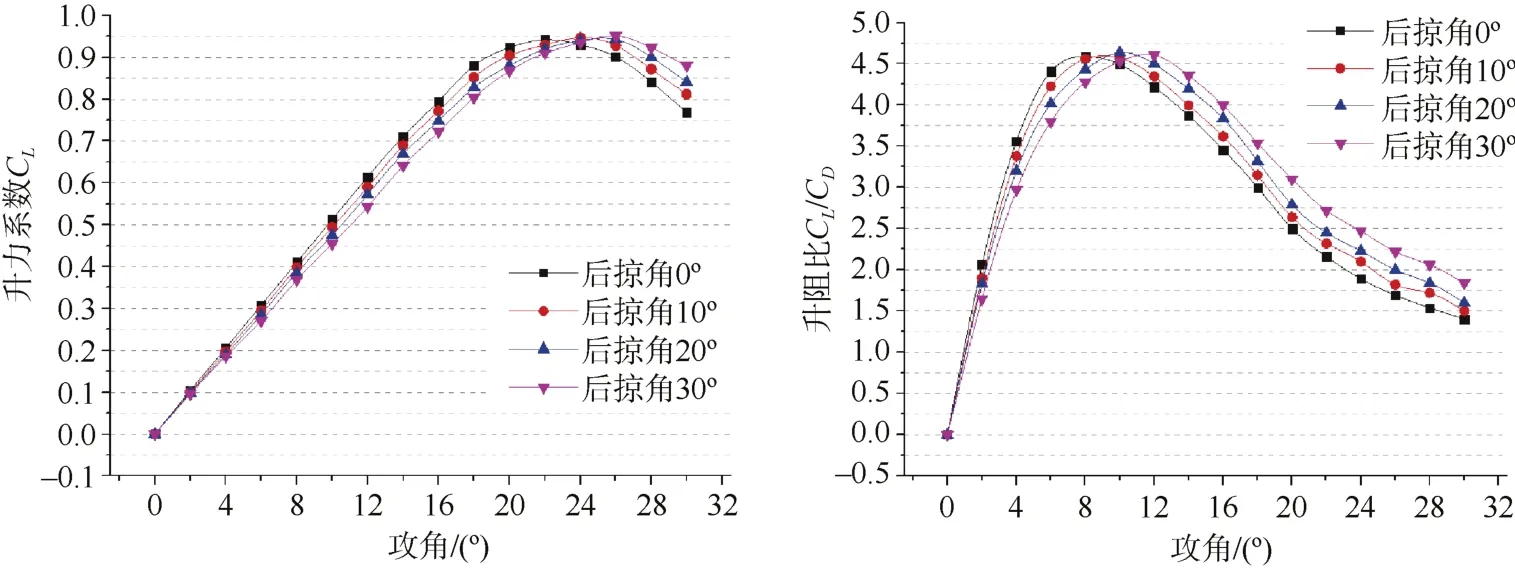
图11 不同后掠角下升力系数与升阻比Fig.11 Lift coefficient and lift-drag ratio under different sweep angles
仿真结果分析如下:
1)与尾舵展弦比参数相比,后掠角对尾舵升力系数以及升阻比的影响相对较小。
2)不同后掠角下,尾舵最大升力系数与最大升阻比相对变化较小,升力系数临界攻角和最大升阻比所对应的攻角随后掠角增大有所增加。在小攻角(0~8°)范围内,后掠角越大其升阻比越小。在整个大范围攻角(0~30°)内考虑,后掠角20°的尾舵模型其升阻比均保持在较大值。
因此,为了使尾舵在整个工作区间内水动力效率较高,同时保证在较大的攻角下有较高的升阻比,本文中尾舵的后掠角χ=20°。尾舵相关参数汇总如表3所示。

表3 尾舵相关参数Tab.3 The boundary conditions of simulation calculation
2.4 尾舵舵轴位置分析
尾舵偏转时,来流作用在舵叶水动力中心的力会相对于舵轴产生一个水动力矩,称之为铰链力矩。在尾舵整个工作范围内,舵叶水动力中心位置和作用在舵叶上的水动力会随着尾舵偏转角度的变化而变化。因此,选取尾舵舵轴位置的原则应是在尾舵偏转角度范围内铰链力矩变化的幅度较小,且数值较小。
本节中采用前文验证过的数值仿真方法对尾舵的水动力性能进行分析,在变化来流攻角下求取不同舵轴位置xp处的铰链力矩MR,仿真计算的尾舵铰链力矩系数CMR如图12所示,其中b为1.1中定义的平均弦长。
仿真结果分析:尾舵轴在不同位置时,随着攻角的变化,铰链力矩系数CMR呈现不同的变化趋势。当xp=0.5b时,在各个来流攻角下尾舵铰链力矩系数CMR数值都比较小,变化范围在(–0.025,0.025)内。因此,将尾舵舵轴设置在此处。
3 泵喷推进水下滑翔机转向性能仿真
利用课题组前期编写的水下滑翔机动力学仿真软件[8],开展泵喷推进水下滑翔机和同尺度下的横滚式水下滑翔机转向性能仿真。
设置浮力调节量为–200 mL,俯仰角为–15°,不同舵角下泵喷推进水下滑翔机机动半径仿真结果如图13所示。仿真结果分析:舵角δr对水下滑翔机机动半径的影响较大,在舵角逐渐增加的过程中,水下滑翔机的回转半径逐渐减小,符合客观规律。在舵角δr大于20°之后,水下滑翔机的机动半径变化幅度较小,当δr=30°时,机动半径达到最小值为9 m。
针对同尺度下的横滚式水下滑翔机,设置浮力调节量为–200 mL,俯仰角为–15°,不同横滚角下横滚式水下滑翔机机动半径仿真结果如图14所示。仿真结果分析:水下滑翔机横滚角越大,其机动半径越小。当横滚角大于20°之后,水下滑翔机的机动半径变化幅度较小,当横滚角达到40°时,水下滑翔机机动半径达到最小值为21.2 m。
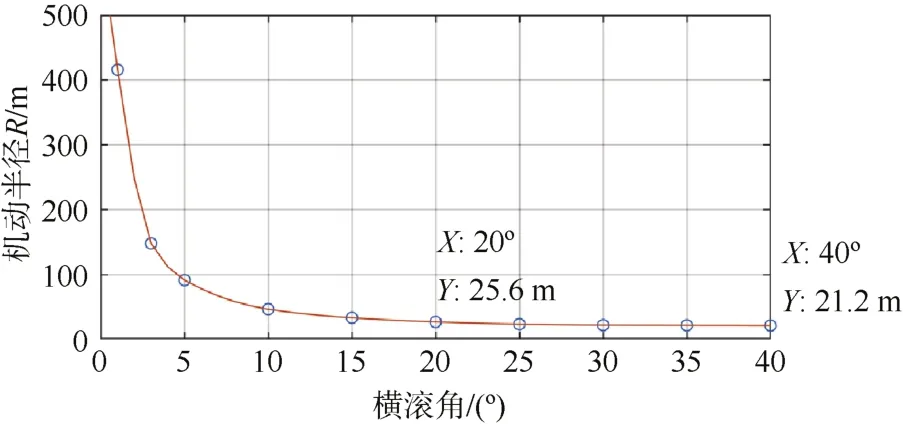
图14 横滚式水下滑翔机在不同横滚角下的机动半径Fig.14 Maneuvering radius of underwater glider at different roll angles
与图13中尾舵式泵喷推进水下滑翔机的机动半径相比,横滚式水下滑翔机在其横滚角范围内(0~40°)所能达到的最小机动半径为21.2 m,而尾舵式在其舵角范围内(0~30°)所能达到的最小机动半径为9 m,可以发现尾舵式水下滑翔机的转向能力明显优于横滚式。
4 结束语
本文采用数值仿真方法,针对水下滑翔机尾舵的主要结构参数包括翼型、展弦比、后掠角、舵轴位置等开展了水动力性能分析,完成了尾舵的水动力结构设计,总结如下:
1)NACA0012翼型与平板翼型和WZF鱼尾舵翼型相比,其可以在较小的阻力下提供较大的操纵力矩,航行经济性较高;
2)对比分析了不同展弦比与后掠角下的尾舵升力与升阻比性能,可以发现展弦比是影响尾舵水动力性能的最重要因素,最终选取了尾舵展弦比λ= 2,后掠角χ=20°;
3)对比分析了舵轴位置对尾舵铰链力矩的影响,舵轴位置为xp=0.5b时,尾舵在整个偏转角度范围内,其铰链力矩变化幅度较小且数值也较小。
利用动力学仿真方法,对比分析了泵喷推进水下滑翔机在安装尾舵结构后与同尺度下横滚式水下滑翔机的转向性能,采用尾舵式转向结构的泵喷推进水下滑翔机最小转弯半径仿真结果为9 m;同尺度下横滚式水下滑翔机的最小转弯半径仿真结果为21.2 m,尾舵式结构的转向性能明显优于横滚式。
本文的研究成果可为水下滑翔机尾舵的结构设计及参数优选提供参考,对提高泵喷推进水下滑翔机机动性,进一步拓展其应用场景具有重要意义,下一步工作将针对尾舵转向性能及结构可靠性等方面开展外场试验研究。
猜你喜欢
海军航空大学学报(2023年5期)2023-11-14 07:41:40
机械设计与制造(2021年2期)2021-03-05 10:00:14
兵器装备工程学报(2020年3期)2020-04-22 08:53:20
知识就是力量(2019年7期)2019-07-01 17:33:03
军事文摘(2018年24期)2018-12-26 00:58:00
小学科学(学生版)(2018年12期)2018-12-19 05:13:46
北京航空航天大学学报(2017年8期)2017-12-20 08:04:56
安徽农学通报(2017年18期)2017-10-18 21:11:49
飞行力学(2016年5期)2016-10-27 02:24:32
北京航空航天大学学报(2016年12期)2016-02-27 06:32:40