
工业机器人实训平台控制系统设计与实现*
2022-01-18 03:02刘媛媛
机械工程与自动化 2021年6期
刘媛媛,李 亮
(山西职业技术学院,山西 太原 030006)
0 引言
近年来,以制造业为主的工业生产朝着智能化方向飞速发展。企业普及应用智能制造装备能够提高劳动生产率,稳定和提高产品质量,降低生产成本,缩短生产周期,保证生产的均衡性,显著提高经济效益。典型的智能制造环节通常包括多道自动化作业工序,需要用到的装备有工业机器人、数控机床、原料仓以及输送机构等等。相应地,企业对以工业机器人为代表的智能制造装备维护人才的需求也在不断地增加[1-3]。2019年全国院校开始实施“学历证书+若干职业技能等级证书”制度(简称“1+X”证书制度),针对智能制造装备中的工业机器人,目前有三种技能等级证书,众多院校也纷纷开设相关课程和进行技能培训。基于三种证书中的工业机器人操作与运维职业技能等级证书,提出了一种面向教学的工业机器人操作与运维实训平台[4],本文对该实训平台的控制系统进行设计,并加以实现。
1 工业机器人操作与运维实训平台
工业机器人操作与运维实训平台(以下简称“实训平台”)集工业机器人、带式输送机、原料库、成品库等设备装置于一体,如图1所示。实训平台硬件部分集成等内容可详见文献[5],本文主要论述该实训平台控制系统的设计与实现。

图1 工业机器人操作与运维实训平台全貌
2 实训平台控制系统设计
实训平台控制系统涉及到的设备装置有工业机器人和PLC(Programmable Logic Controller的简称,即可编程逻辑控制器)等。其中,工业机器人主要用于原料库工件的自动分拣、码垛和搬运等任务,在工业生产搬运和码垛作业中发挥着重要的作用,担任着提高生产效率、降低成本和解放劳动力的重要角色;PLC为自动化装备控制系统的核心部件[6-8],采用西门子SIMATIC S7-1200 PLC。
2.1 设计思路
PLC作为实训平台控制系统的主控制模块,主要完成以下任务:
(1) 控制3自由度机器人的运动。机器人末端执行器TCP(Tool Center Point的简称,即工具中心点)在笛卡尔直角坐标系中某点的定位由对应的接近开关检测信号并传输回PLC输入端,PLC的输出端则输出控制信号到3自由度机器人的轴电机控制端,控制相关电机的启停,实现末端执行器TCP到达该点位置。
(2) 控制带式输送机的运动。构建一条小型带式输送机用于模拟企业实际生产中的自动化生产线,该生产线自动启动或停止动作同样由PLC控制实现。启动和停止的输入信号分别由位于带式输送机上合适位置的光电传感器采集并传输到PLC。
(3) 其他设备部件的控制。如3自由度机器人末端执行器吸盘工作状态(吸或放工件)的实现由PLC控制电磁换向阀动作来实现。
工业机器人完成工件的搬运、码垛等任务,其控制程序在示教器上进行编写,程序中涉及到与PLC进行信号交互。
触摸屏作为上位机操作面板模块,主要完成平台功能操作、相关数据显示等任务,如总控操作(实训平台启动、暂停和停止)、流程显示、故障显示等。
2.2 工作流程
实训平台控制系统工作流程如图2所示。PLC程序判断原料库有无工件,没有则手动放若干工件于原料库,使流程继续。图2中虚线部分根据实际任务要求表示工业机器人可选择先码垛再搬运工序或者直接进行搬运工序。根据实际任务要求,PLC程序判断流程是否应该结束,若仍有工件待“加工”,则继续用循环程序实现相应流程。
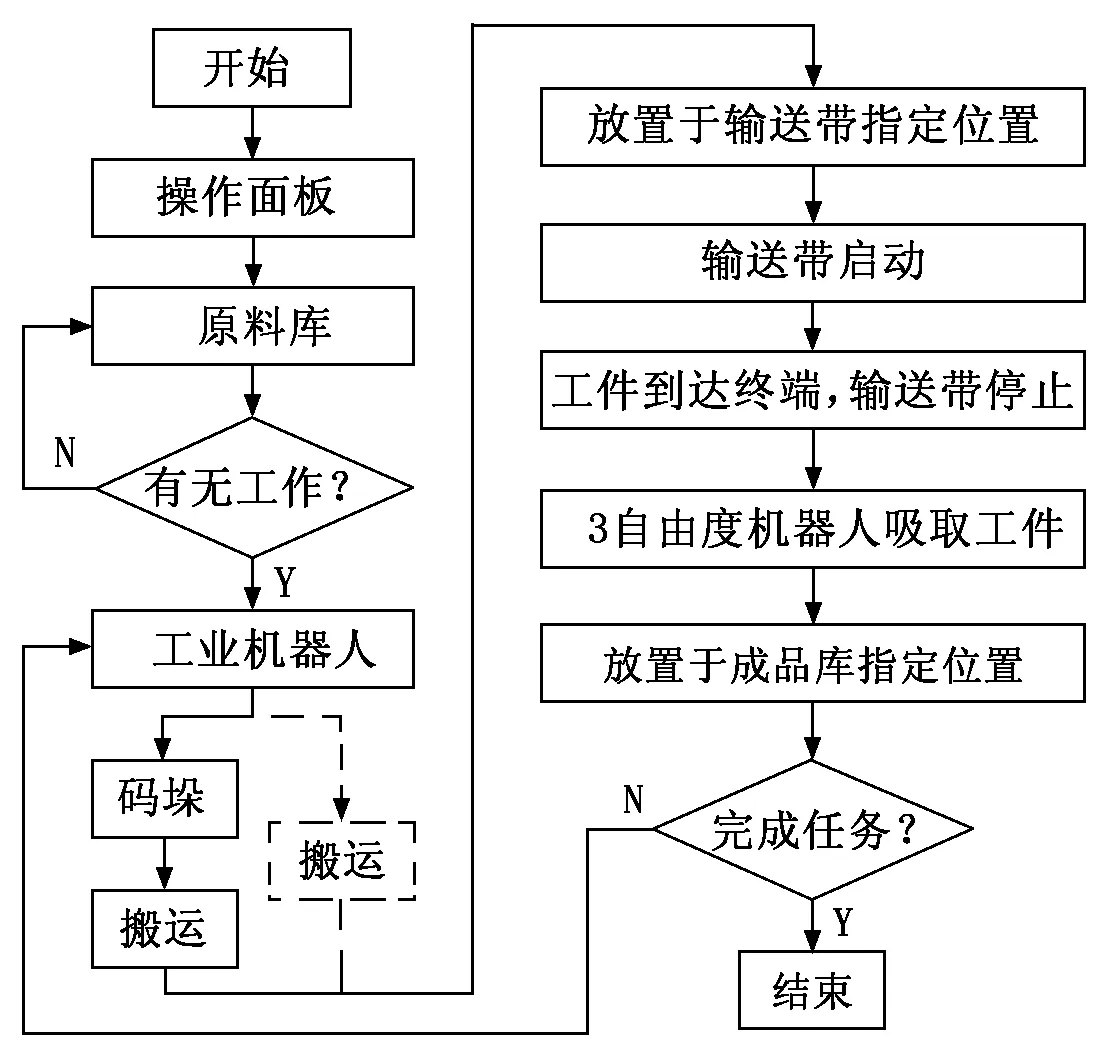
图2 实训平台控制系统工作流程
2.3 程序设计
在实训平台整体硬件都搭建完毕后,即可进行控制系统程序设计。本实训平台控制系统程序包括PLC程序、工业机器人程序和上位机程序三部分内容。
2.3.1 PLC程序设计
应用博途软件实现对PLC程序设计、编写及调试等,实现3自由度机器人X、Y和Z三个方向的正负运动的启停、计数和报警等功能,原料库工件有无的判断、流水线的启停以及库位通讯等功能。其中X轴驱动电机的核心控制语句如图3所示。

图3 X轴驱动电机核心控制语句
2.3.2 工业机器人程序设计
工业机器人程序采用模块化设计思维编写,既能提高编写效率,又便于程序的检查。实训平台兼容市面上大多数厂家的工业机器人,以广数GSK08型工业机器人为例,程序分为初始化、取工件、放工件、码垛等各子程序,在主程序中根据实际任务要求调用相应的子程序即可。部分机器人关键程序语句如下:
……
WAIT IN08,ON,T0; #等待PLC输入信号,收到后执行下面指令
MOVJ P1,V20,Z0;
MOVL P2,V100,Z0;
DOUT OT10,ON; #吸取工件
MOVL P1,V100,Z0;
MOVL P3,V100,Z0;
MOVL P4,V100,Z0;
DOUT OT10,OFF; #放下工件
DOUT OT09,ON; #向PLC发送工件完成放下指令
……
2.3.3 上位机程序设计
上位机程序设计的流行趋势是图形化编程。本实训平台上位机程序设计步骤如下:
(1) 任务分析、确定变量等参数。
(2) 各界面的图形绘制。
(3) 关联对应的PLC变量等参数。
(4) 整体调试。
本实训平台上位机图形界面如图4所示。

图4 实训平台上位机图形界面
3 结语
本文较为详细地论述了面向教学的工业机器人操作与运维技能实训平台的控制系统设计与实现过程。经过实际检验,该实训平台能够有效促进工业机器人相关实践教学的开展,帮助学生掌握综合知识和技能,提高学生自身专业素养。
猜你喜欢
装备制造技术(2020年3期)2020-12-25
重型机械(2020年3期)2020-08-24
计算机教育(2020年5期)2020-07-24
电子制作(2019年20期)2019-12-04
电子制作(2019年9期)2019-05-30
车迷(2018年12期)2018-07-26
中国老区建设(2016年3期)2017-01-15
山东工业技术(2016年15期)2016-12-01
山东工业技术(2016年15期)2016-12-01
学习月刊(2015年3期)2015-07-09
