
库卡KR16 R1610-2工业机器人的建模和刚体动力学分析
2022-01-18 11:32何政洋严本金
内蒙古科技与经济 2021年23期
何政洋,严本金
(四川大学锦江学院, 四川 眉山 620860)
机器人的动力学分析是对目前从未出厂到升级改造中的机器人本体结构做性能评估以及辅助构思改进措施。如果这种分析用实物来做实验的话危险系数极高,造价也极高,所以会利用计算机模拟仿真来实现这一目的。我们进行工业机器人刚体动力学分析的主要目的是:①帮助完善和改进机械系统的稳定性和精度;②得出机械系统的动力学特性检测数据并根据特性曲线给出更优的本体结构;③检测机械系统能否完全满足承载和运动的要求。
在机器人模拟仿真的过程中,创建恰当的模型、动力学的计算、设计优化等都是十分重要的工作,工作量也比较大。随着计算机技术的发展,仿真软件逐步改良。目前,由美国的MSC公司开发的ADAMS仿真软件具有使用方便易上手、功能齐全、模型修改容易、灵活机动等优点[1-3]。
笔者主要是利用solid works对库卡KR16 R1610-2工业机器人进行建模,再利用ADAMS对该机器人模型进行相关的仿真分析测试评估。
1 机器人动力学分析方法
六轴工业机器人机构的动力学分析研究包括动力学模型创建、受力分析、力学计算、速度计算、动力学平衡方程等方面,它们是确定机器人主要结构参数的根本。要解出这些参数便要选择出恰当的动力学仿真分析方法,然而,目前比较常用的动力学仿真分析方法主要有三种:牛顿——欧拉方法、欧拉——拉格朗日方法和李代数。
其中,牛顿——欧拉方法递推动力学方程就是要创建运动和力之间的联系,我们递推的结果就是一个微分方程,是连接运动与力的关系桥梁。牛顿——欧拉递推法将机器人连杆看成刚体,然后根据矢量在不同坐标系下的转换关系递推关节速度、角速度、加速度和角加速度,再由牛顿公式和欧拉公式来求得各杆件重心处的力和力矩矢量。其推导出的式子比较形象,指示明确。
而欧拉——拉格朗日方法一般有两种推导方法,分别是:虚位移法和最小作用量法。我们可以利用欧拉——拉格朗日方程来描述力与系统运动的关系,该方程的递推是利用牛顿第二定律的力学原理来推导的,推导过程比较简便,但是该方法在面对比较复杂的多自由度机器人结构来说构建并求解欧拉——拉格朗日方程是很难做的,计算过程中会有很多计算机无法代替的烦琐的人工计算过程,这样不仅费时费力还极易出现错误。
至于李群李代数方法,这不失为我们机器人行业仿真分析计算的一个好方法,其计算量小且计算步骤简便的优点为众人所熟知。但是它所涉及的旋量代数和一些特有的命名使得整个计算过程都比较抽象,很多人不能很好地理解李代数求解机器人动力学分析过程中的推导步骤。
综上所述,笔者选取牛顿——欧拉方法来求解库卡KR16 R1610-2机器人的动力学分析过程。
2 solid works建模与ADAMS机器人仿真
以库卡公司生产出的库卡KR16 R1610-2工业机器人为例,该机器人的工作范围是2 013mm,其重复定位精度为±0.04mm,载重为16kg。
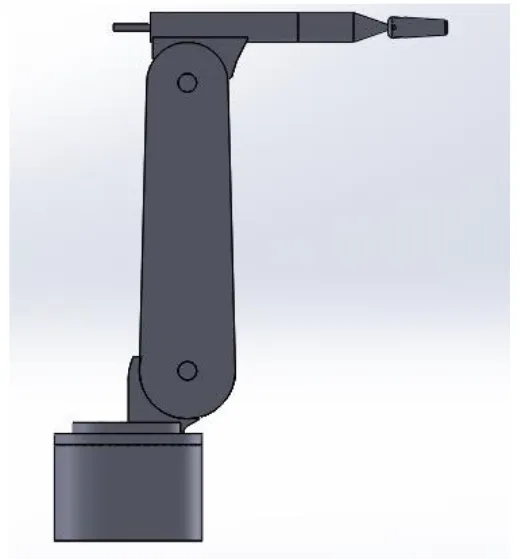
图1 工业机器人模型
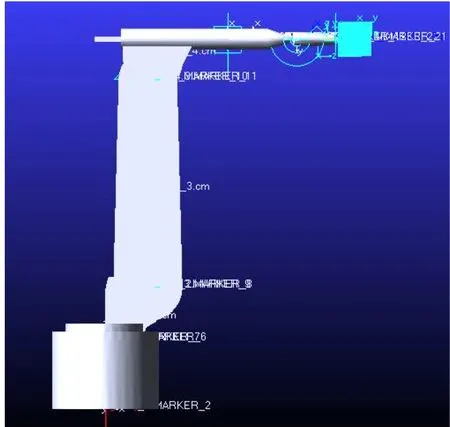
图2 库卡机器人16kg负载仿真模型
根据库卡KR16 R1610-2机器人的相关数据,利用solid works 2019软件里装配好后的完整模型如图1所示。然后将装配体导入到ADAMS软件中进行仿真分析,在ADAMS工作界面的物体栏里选择一个圆柱体和一个长方体组装到机器人模型末端作为负载;在机器人模型各关节处加入对应的连接,由于该机器人各轴均为转动副,故添加连接时均添加转动副并将所有转动副转轴调整来与机器人各零部件转轴同轴心,因为机器人的各关节均有电机单独带动,所以还要给每个转动副加上驱动;添加各个驱动的运动速度[4-7]。将最大的静摩擦系数设为0.5,动摩擦系数设为0.3,机器人在工作中的运行基本都是有负载的,所以还要给机器人的末端执行器添加一个负载,而该机器人的额定负载为16kg,因此在机器人的末端执行器上增加一个16kg的负载。增加了额定负载的仿真模型如图2所示。由于程序编辑的时间是5s,且仿真能看清运动过程,所以将仿真界面的终止时间设为5s,步数设为2 000。
3 ADAMS仿真结果
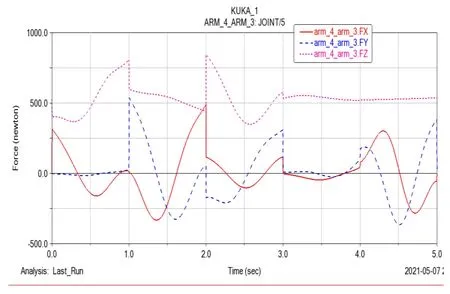
图3 库卡KR16 R1610-2机器人的3关节力
笔者以机器人的第3关节为研究对象,对研究结果进行分析。图3为库卡KR16 R1610-2机器人的3关节力,图4为库卡KR16 R1610-2机器人的3关节力矩,其中3关节以正方向力为主的关节。可知3关节力在X方向最大,关节力约500N,最低约-260N,Y方向的最大关节力约520N,最低约-300N,Z方向最大关节力约600N,最低约-300N;3关节在X方向关节力矩最大约为1 300N·m,最小约为-400N·m,Y方向关节力矩最大约为400N·m,最小约为-900N·m,Z方向关节力矩最大约为1 800N·m,最小约为-1 600N·m。而库卡机器人的步进电机所能产生的力矩高于这个最大值,因此说明该机器人能在16kg负载情况下正常运行。
4 结论
笔者通过对工业机器人库卡KR16 R1610-2进行三维建模及其动力学仿真分析,可以得出以下结论:①利用solid works软件构建了库卡KR16 R1610-2机器人的三维模型,然后导入ADAMS软件添加驱动、约束等条件以完成该机器人的仿真分析。②通过ADAMS软件进行了该工业机器人的仿真,得到了该库卡KR16 R1610-2机器人在额定负载下的动力学特性,为以后对该机器人的性能改进和电机选型等提供了有力保障。
猜你喜欢
小哥白尼(趣味科学)(2022年7期)2022-09-20
车主之友(2022年4期)2022-08-27
哈哈画报(2022年1期)2022-04-19
车迷(2022年1期)2022-03-29
扬子江诗刊(2020年3期)2020-11-17
文苑(2020年8期)2020-09-09
扬子江(2020年3期)2020-06-08
小学生学习指导(中年级)(2019年10期)2019-10-08
环球时报(2016-07-21)2016-07-21
作文与考试·小学高年级版(2016年7期)2016-05-14
