
智能安全头盔太阳能充电监测系统设计
2022-01-18 06:27唐立军周年荣张旭东
云南电力技术 2021年6期
唐立军,周年荣,张旭东
(云南电网有限责任公司电力科学研究院,云南 昆明 650217)
0 前言
单片机的出现推进了网络时代的进一步发展,最开始出现的单片机性能比较低,结构简单,其容量较小,但很快出现了高性能的单片机弥补了之前单片机的不足[1]。微控制单元(Microcontroller Unit;MCU),也叫单片微型计算机(Single Chip Microcomputer ),其应用领域十分广泛,如各种测控系统、智能仪表等比较复杂性能高的系统中[2]。
智能安全头盔是将一个寻常的头盔融合高端科技产品升级,实现人们需求的智能性能头盔,其主要应用在应急救助领域中,如火灾现场、地质探测等领域[3]。太阳能充电可将太阳能转换成电能对所需物件进行充电,太阳能是一种环保可再生资源[4],它主要通过太阳光线让物体产生能量,通常用作发电。将太阳能充电技术应用在智能安全头盔中,可降低头盔能耗,为头盔提供丰富的能源。同时智能安全头盔中太阳能充电状态的有效监测,对于确保智能安全头盔的正常运行,提高其安全性能具有重要的应用意义。
本文利用高性能MCU单片机,设计了一款智能安全头盔太阳能充电监测系统,其不仅能有效的跟踪智能安全头盔的太阳能充电情况,还能提升充电状态监测效率,应用价值高[5]。
1 系统设计
1.1 智能安全头盔的结构设计
智能安全头盔包括头盔构架、太阳能电池列阵、聚合物电池、控制器等,见图1。其详细分布包括内嵌蓄电池、前部面罩、尾部散热片、半导体制冷片、冷面散热层、透明工程塑料、太阳能电池板、电路板和冷面散热层,这些设备构成智能安全头盔结构。智能头盔的内外支架是连接两曲面的连接设备,高强度工程塑料(顶盖)是外曲面的制作材料[6];导热和重量是内曲面思考的核心因素,因此选取比较纯的导热性能好的新型网状铝合金材料(将其用作散热片和头部支架),将绝热材质用作两曲面间的支架。为了便于接受太阳光照射,将头盔顶盖做成透明,靠在曲面头盔顶端内部是太阳能电池列阵并做成曲形,用绝热泡沫填补两曲面剩下的空间[7]。
1.2 太阳能充电监测系统设计
1.2.1 系统参数和硬件总体结构
设计的智能安全头盔太阳能充电监测系统结构用图2描述。可以看出系统包括感知数据采集单元、控制传输单元、监测数据跟踪单元三部分。其中感知数据采集单元中的CorteX-M7内核高性能单片机以及监测数据跟踪单元中的最大功率跟踪模块中采用的STC2C5412AD单片机是本文监测系统采用的两种关键的高性能MCU。

图2 太阳能充电监测系统结构图
基础继电器、CC2530设备和CorteX-M7单片机等构成系统的感知数据采集单元[8],其通过充电数据选择、控制连接等功能,完成监测数据的采集。确保太阳能充电监测系统的连接更加牢固,加速太阳能充电控制监测程序的执行能力,可通过CorteX-M7单片机完成。
控制传输单元在有效控制调节接口传输的条件下,通过InDTU332数据传输模块和ARM处理器推动太阳能以太接口的连接以及器件电路同系统电源的联合,实现总体监测系统监测数据的高效率传输。控制单元也是整个太阳能智能充电监测系统的纽带,实现感知数据采集单元和监测数据跟踪单元间数据的交互连接[9]。
监测数据跟踪单元,通过InDTU332数据传输模块将控制传输单元获取的监测数据通过CC253设备传输到充电控制器中进行分析控制,该控制器采集充电控制器监测数据的模式运行调控,同时将其反馈到太阳能充电板中,再结合最大功率跟踪模块获取的太阳能数据,选择合理的智能监测策略,实现安全头盔太阳能充电的智能监测。
1.2.2 Core-M7单片机模块集成
太阳能充电监测系统中CoreX-M7单片机拥有六级、双发射超标量流水线,具有高精度的浮点运算单元,可降低对额外数字信号处理器以及微控制器的需求[10],是一种高性能的处理器。BST-V51是CoreX-M7单片机的智能集成地板,为了避免无意义监测损耗,以太阳能充电线路的闭合状态为基础,对控制器电机转速进行调节,让系统驱动能力实现最佳形态在较少的时间中,且强迫没用全面使用的太阳能电子迅速进入器件控制电路[11]。该种单片机的内存接口连接紧密,具有超高速的响应速率,采用嵌入式跟踪宏单元选择和配准相关的运行指令以及数据轨迹,大大提高总体数据采集单元的能见度,提高数据采集性能。
1.2.3 最大功率跟踪模块设计
系统中监测数据跟踪单元中的太阳能最大功率跟踪模块结构图见图3。
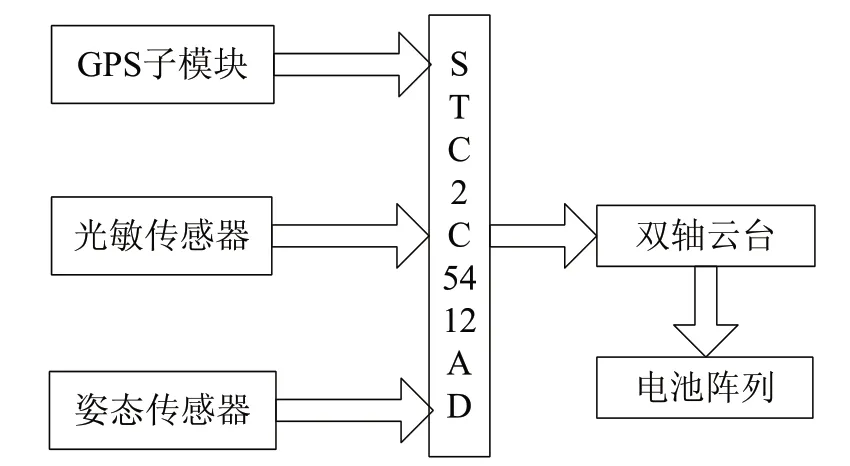
图3 最大功率跟踪模块结构图
从图中可以看出最大功率跟踪模块的控制核心是STC2C5412AD单片机,采用卡尔曼算法融合预测太阳轨迹算法以及光敏传感器得到的太阳方位信息,再驱动双轴云台使得电池阵列运行,对光源位置进行准确检索,确保太阳能充电板中的电池阵列处于最大功率点周围[12]。通过九轴姿态传感器对电池阵列的旋转姿态进行有效的检测,确保跟踪模块对太阳光源位置进行准确跟踪。
1)光敏和九轴姿态传感器:通过四象限法实现光线传感器最大功率跟踪,其设计理念利用三点构成平面,此模型选用三个光电三极管(3DU33),三个传感器,圆筒内部有一个,在挡板外实行隔离的有两个[12]。此传感器输出的光电流越大,光强度越强,反之输出的光电流越小,光强度越弱,且电压信号的产生采用信号调节电路转化电流信号得出。
2)GPS子模块:通过了解当地经度、纬度和时间等信息可求解太阳高度角和方位角。系统中的最大功率跟踪模块利用GPS子模块实时修正数据,为了提升太阳能数据监测结果的精度,可通过太阳轨迹天文算法获取太阳对应的位置[13]。
地球自转在单位时间内形成的角度被称为时角,并设置0°是中午12点形成的时角,且时角提升15°需要经过1h,(-180°~180°)是时角的取值范畴,若A是当地时间(单位:h),则获取的地方时角是α:

通过太阳与地球中心连线与地球赤道平面间形成的夹角叫做赤纬角,太阳赤纬角在春分日和秋分日是0°,北纬23° 26"是太阳赤纬角在夏至日时,南纬23°26"是太阳赤纬角在冬至日时。由此随意一天赤纬角在整年中满足:

其积日数是M,计算的起始时间是1月1日,日期通过GPS数据帧中获取,因此求解积日数M。
太阳光的入射方向和地平面间的夹角为太阳高度角,且观测点纬度ε和太阳高度角b满足:

太阳光线在地平面上的投影和当地子午线形成的夹角是太阳方位角且正南方向是0,并和东方成反比例,和西方成正比例,当到达正北方变成±180°,当方位角处在正午时全是0,且方位角β满足:

2 系统软件设计
2.1 最大功率跟踪算法设计
太阳能最大功率跟踪是总体智能安全头盔太阳能充电监测系统的关键部分,系统软件通过卡尔曼滤波算法融合光线传感跟踪法和太阳轨迹跟踪法,实现太阳能最大功率的高精度跟踪[14]。最大功率跟踪算法的详细流程见图4,可以看出其通过预测-实测-修正三个过程实现太阳能最大功率的有效跟踪。

图4 最大功率跟踪算法流程图
2.2 系统监测策略分析
分析监测系统的监测流程,对关键处理节点实施避障操作,合理选择智能监测策略。
2.2.1 太阳能控制巡迹
内监测走线、外监测走线、环行走线是太阳能充电监测系统的巡迹方向,融合两类或两类以上的巡迹方式得到5种太阳能充电监测巡迹选型策略。
1)利用杜绑线连接监测系统的全部巡迹走线,为监测系统配备两个减速机辅助监测装备,完成监测系统巡迹的内监测走线。此巡迹的优点是可在系统内部同CorteX-M7单片机相连,借助高性能单片机提高监测性能,缺点是运算量大[15]。
2)利用web数据线连接监测系统的全部走线,监测系统真实损耗状况可通过配备一个SAMRTDUINO设备和连接一个电机固定件获取,实现监测系统外监测走线型巡迹,该种巡迹方式的优点是能明确了解监测系统的损耗状况,提高监测精度。
3)杜邦线和web数据线分别连接太阳能充电监测系统的内线和外线,且配备一个平台共享设备,实现监测系统的环形走线巡迹,其优点是使用范围广,整体损耗费用低,缺点是限制监测准确率。
4)融合内线、外线以及环线的监测系统寻迹方式,融合了三种寻迹方式的优势。
2.2.2 监测避障操作
合理处理系统监测轨迹,对于避免系统出现严重处理漏洞具有重要应用意义。处理过程中,应先明确系统中控制器设备的巡迹方式,分析产生故障数据的数量级规范,再通过合理的运算公式规划监测避障操作的规范。针对内、外、环3类走线巡迹是监测系统监测避障管理的基本规范要求,设置监测系统设备最高智能充电量低于其的选取标准是在单位时间内,c是最长充电时间,且用式(5)描述3类走线巡迹措施的监测避障管理标准:
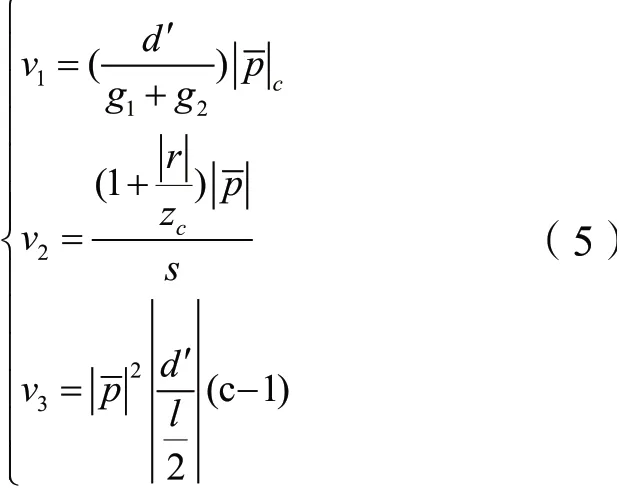
其中,3种走线巡迹措施的监测避障指标分别是ν1、ν2和ν3,杜邦线内太阳能充电电子的平均传输速率是d′,两个减速电机的辅助监测参量是g1和g2,SMARTDUINO设备的智能充电系数是|r|,Web监测数据线在最长充电时间的消耗常量用zc表示,监测系统的真实损耗情况参数和环形巡迹措施的物理监测时间分别用s和l表示。
复合型监测系统巡迹措施没有鲜明的计算公式,获取新复合型监测系统迅肌操作规范,应基于式(5),采用式(6)对ν1、ν2和ν3监测避障指标进行加工:
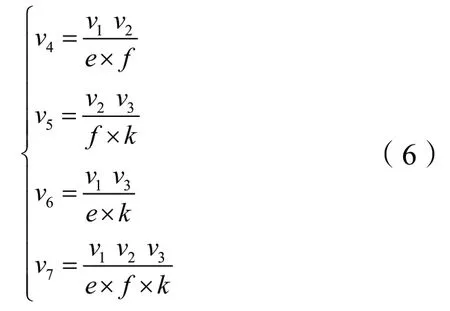
其中,e、f和k分别表示走线型监测系统巡迹的避障指标,这些指标描述同三种巡迹措施监测避障指标关联的监测系数;ν4、ν5、ν6和ν7分别表示3.2.1小节描述的四种太阳能充电监测系统巡迹选案的避障指标。
3 仿真实验
实验对象为某型号智能安全头盔,检测实验智能安全头盔运行的0.002 s到0.026 s时间段内,本文系统、STM32系统以及PIC系统,对实验安全头盔的太阳能最大功率的跟踪效果,结果分别见图5、图6、图7。

图5 STM32监测系统跟踪效果
分析图5可知,STM32监测系统到0.008s时,跟踪到头盔太阳能的最大跟踪率,且持续了0.06 s。
分析图6可知,PIC监测系统到0.010 s时,跟踪到最大跟踪率,持续了0.04 s。
分析图7可知,本文系统到0.006 s时跟踪到太阳能最大功率,持续了0.08 s。对比分析图5、图6、图7可知,本文系统跟踪实验安全头盔太阳能最大功率的速度高于其它两个系统,且跟踪最大功率的持续时间长。实验为了检测本文系统监测太阳能充电信号的稳定性,对比分析三种系统进行太阳能充电监测过程中的监测信号变化情况分析数据可知,随着监测时间的不断增加,STM32监测系统监测数值从3Mb上升到65 Mb,又从65 Mb下降到5 Mb,变化趋势非常大,PIC监测系统监测信号数值从3 Mb上升到60 Mb,又从60 Mb下降到15 Mb,其变化趋势也比较显著,而本文系统的变化趋势从3 Mb上升到45 Mb之后,一直在45 Mb左右间,其变化趋势相对稳定,说明本文系统进行智能安全头盔太阳能充电监测的稳定性好,为智能安全头盔的稳定运行提供了可靠的保障。
4 结束语
本文设计的智能安全头盔太阳能充电监测系统,采用了CorteX-M7和STC2C5412AD两种高性能单片机,其中CorteX-M7内核高性能单片机协助系统感知数据采集单元实现监测数据的高效率采集,STC2C5412AD单片机协助系统最大功率跟踪模块实现太阳能最大功率的有效跟踪,对光源位置进行准确检索,确保太阳能充电板中的电池阵列处于最大功率点周围。本文系统采用的两种高性能MCU避免无意义监测损耗,大大提高了总体系统的监测效率,确保太阳能充电监测智能安全头盔的运行稳定,提升智能安全头盔的使用时间。
猜你喜欢
华人时刊(2021年15期)2021-11-27
中学生天地·高中学习版(2020年3期)2020-04-10
中国航海(2019年2期)2019-07-24
户外探险(2017年3期)2017-03-11
小学生导刊(低年级)(2016年8期)2016-09-24
中学生数理化·八年级物理人教版(2016年5期)2016-08-26
中学生数理化·八年级物理人教版(2016年5期)2016-08-26
儿童故事画报·发现号趣味百科(2015年3期)2015-12-04
少儿科学周刊·儿童版(2015年7期)2015-11-24
少儿科学周刊·儿童版(2015年7期)2015-11-24
