
基于门控循环单元的驾驶行为辨识研究
2022-01-18 12:06薛俊俊陈双
汽车实用技术 2021年24期
薛俊俊,陈双
基于门控循环单元的驾驶行为辨识研究
薛俊俊,陈双
(辽宁工业大学 汽车与交通工程学院,辽宁 锦州 121000)
准确识别驾驶行为,有利于提高车辆行驶安全性。文章针对目前驾驶行为识别方法的主观性和识别准确率低的问题,从驾驶员的角度出发,建立了基于门控循环单元网络的驾驶行为辨识模型。利用驾驶模拟器获取驾驶员操纵数据并建立驾驶行为数据集,模型经过训练后,能够有效利用驾驶员操纵数据的时序特征,成功识别紧急加速、紧急制动和平稳直线行驶,模型的识别准确率到达96.67%,为交通安全领域提供重要的理论支持。
驾驶行为辨识;深度学习;门控循环单元
前言
基于车辆行车数据进行驾驶行为识别的研究方法大多为传统机器学习算法,其中最具代表性的方法是隐马尔可夫[1]、支持向量法[2]和模糊控制[3],这些方法需要人工提取特征,特征的选取会因人而异,主观性较强。
随着人工智能的逐渐普及,深度学习成为近几年的研究热点,它的优势在于非线性映射数据特征层并且可以自动快速构建深层特征。ZYNER等人[4]提取激光雷达跟踪系统的数据,建立循环神经网络模型,推断驾驶员在无信号灯交叉路口处对车辆的操作行为。JOAKIM[5]建立混合密度模型,提取当前车辆行驶轨迹以及该车与周围车辆的相对行驶轨迹的特征,预测驾驶员变道意图。惠飞等人[6]提出双向长短记忆网络及全连接神经网络的拓展神经网络检测模型,能有效利用行车数据在时间序列上发生突变时的特征,提高异常驾驶行为识别准确率。WANG等人[7]利用深度学习对时间序列处理的突出优势,将历史时刻的车速、速度差以及车辆位置差作为模型输入,建立了基于GRU网络的车辆跟驰模型。实验结果表明,该深层神经网络模型比传统跟车模型,精度更高,测试效果更好。
本文基于驾驶员操纵数据和车辆行驶状态数据进行驾驶行为识别,这些数据是典型的时间序列数据,而门控循环单元(简称GRU)网络在处理时序问题有突出优势,目前对GRU的研究主要集中在音频识别[8]、交通流量预测[7]等领域中,GRU还未被用于针对车辆本身在驾驶员的角度对驾驶行为进行识别的研究。因此,本文建立了GRU网络模型对驾驶行为进行辨识。利用GRU网络处理时序数据的优势,自动提取驾驶行为发生时的时序结构特征,有利于提高辨识准确度。最后,利用Softmax函数计算出驾驶员操作行为,即紧急加速、紧急制动和平稳直线行驶的识别率。
1 门控循环单元网络
长短期记忆网络(简称LSTM)[9]引入了门控机制调节信息流,成功解决了循环神经网络存在的梯度消失等问题。然而,LSTM模型结构复杂,需要较长的训练时间。2014年CHO等人[10]针对优化LSTM的结构提出了GRU网络,结构如图1所示。GRU在处理与时序高度相关的问题上是其他神经网络无法媲美的。

图1 GRU结构
图中z代表更新门,r代表重置门,h是GRU网络在时刻的输出,由前一时刻的输出信息h1和当前记忆内容h'组成的,利用更新门控制这两类信息的流入。GRU网络更新权重参数公式如下:





2 驾驶模拟器试验与数据获取
2.1 试验工况
驾驶员对车辆的操纵行为主要有加速、制动和转向,本文主要研究车辆纵向行驶的驾驶行为,分别是紧急加速、紧急制动、以及平稳直线行驶,其中平稳直线行驶包括正常加速、正常制动和匀速行驶。
以中华H30轿车为主体的驾驶模拟器作为试验平台,如图2所示。选择20个不同年龄的驾驶经验丰富的志愿者,每人进行2次实验。车辆起步时采集驾驶员操纵数据,包括制动踏板开度、加速踏板开度、速度和加速度。

图2 驾驶模拟器试验平台
2.2 试验数据处理
由于d SPACE实时仿真系统采样频率为1 000 Hz,采集了大量的试验数据,后续处理十分复杂。为了提高效率,对将试验数据进行重采样,采样频率调整为100 Hz。在采集数据的过程中,不可避免地会受到运行设备的电磁波干扰,试验数据中混入白噪声。中值滤波能使白噪声对数据影响降到最低,且对数据准确性影响也较小。滤波后加速度如图3所示。
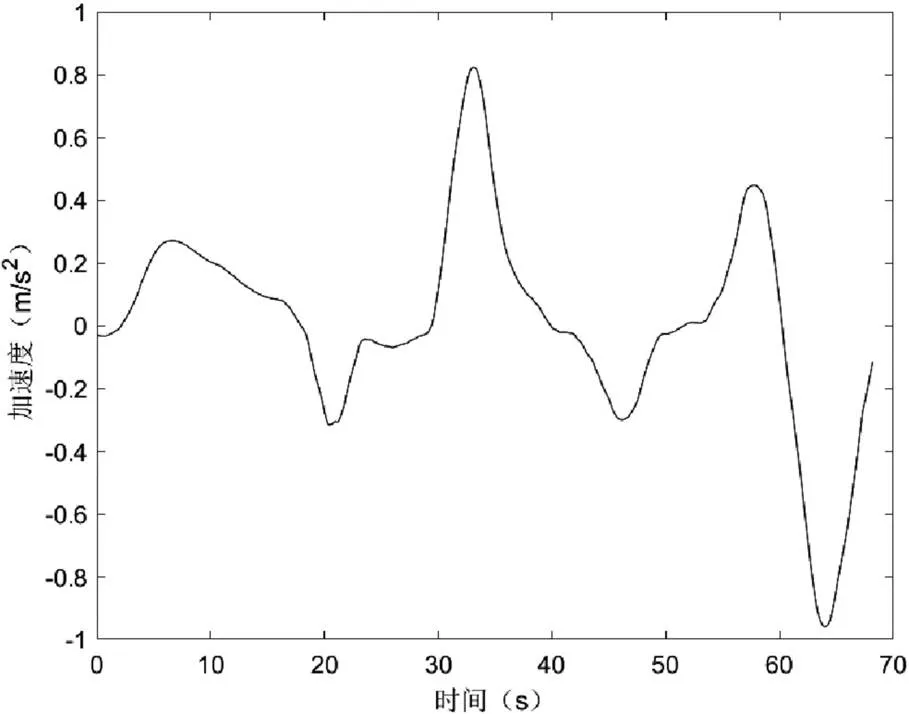
图3 滤波后的加速度曲线
2.3 建立驾驶行为数据集
当车辆在平直良好的路面上正常行驶时,车辆加速度变化范围是−0.4 m/s2<<0.4 m/s2。利用滑动窗口法,截取3 s内驾驶行为发生的数据,并贴上标签。本文共截取300个数据段,建立了驾驶行为数据集。其中包括180组平稳直线行驶数据段,标记为类别1;60组紧急加速数据段,标记为类别2;60组紧急制动数据段,标记为类别3。
3 实验过程及结果分析
3.1 模型的训练优化
本文所使用的算法是在Matlab软件中实现的,网络模型包含四层,分别是输入层、GRU层、全连接层和Softmax层。设置学习率为0.001,采用交叉熵损失函数和SGDM优化算法用来训练模型,加快参数更新速度,使辨识模型的拟合效果更好。建立网络模型后,输入数据集中的样本。从数据集中随机选取80%为训练集,20%为测试集,前者对用于模型训练,后者用于模型测试。
辨识模型在训练过程中的损失函数变化如图4所示,模型的损失函数值一直呈现下降的趋势,并且下降速度较快,随着迭代次数增多,损失函数稳定在0.1。本文基于GRU网络建立的驾驶员操作行为辨识模型准确率高,损失值小,收敛速度快,易于训练。
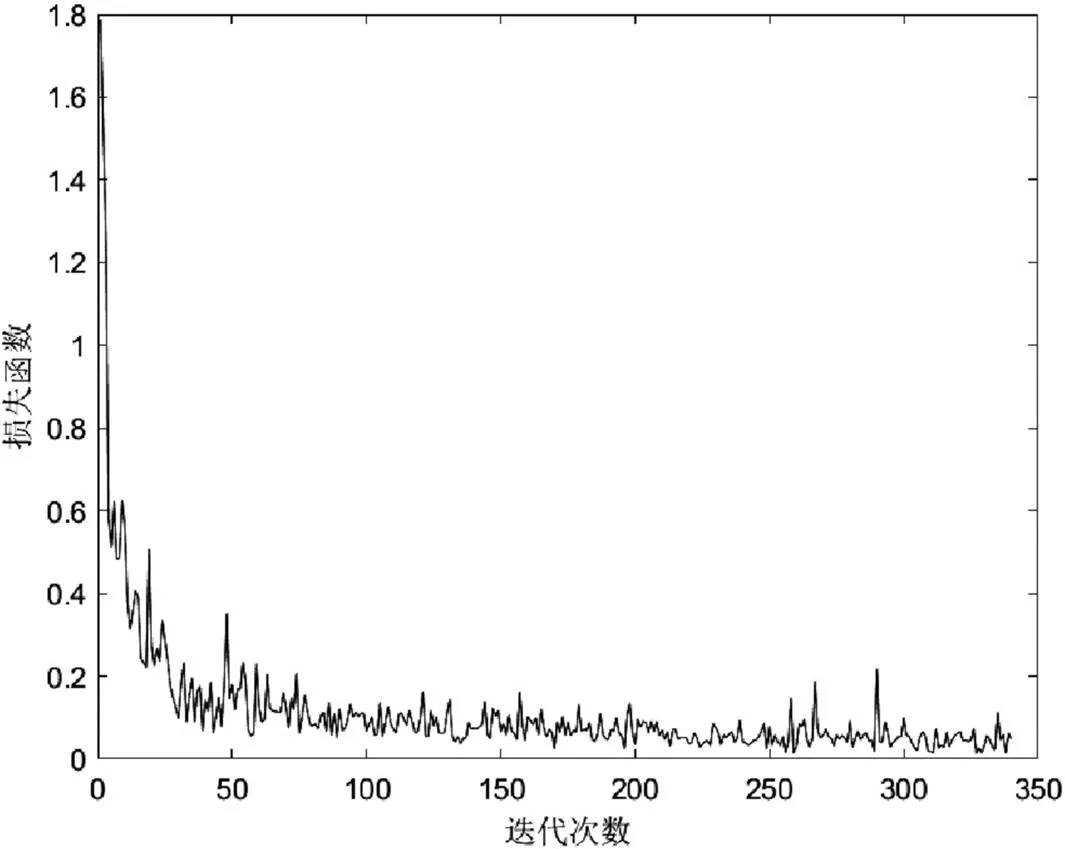
图4 损失函数
3.2 实验结果分析
辨识模型经过训练后达到最优模型,利用测试集对模型进行测试。图5是测试集对辨识模型测试过程中的误差对比图。从图中可以看出模型的预测类别与真实类别分布十分接近,误差较小。
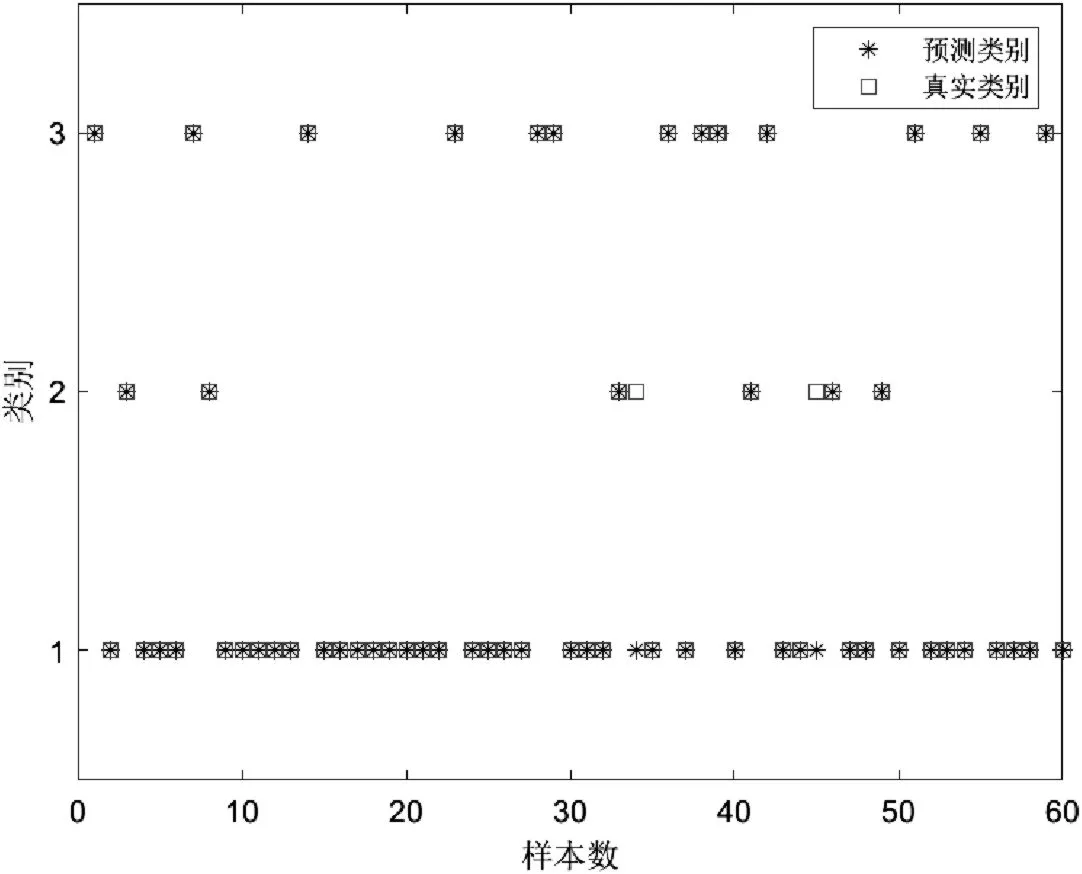
图5 测试误差对比图
利用辨识模型在测试集上得到的测试结果绘制模型的混淆矩阵,如图6所示,能够更直观地显示辨识模型对不同驾驶行为的识别能力。模型产生错误的辨识主要集中在正常行驶和紧急加速。这可能是因为有些驾驶员在紧急加速时比较谨慎,使得模型将两类驾驶行为混淆。
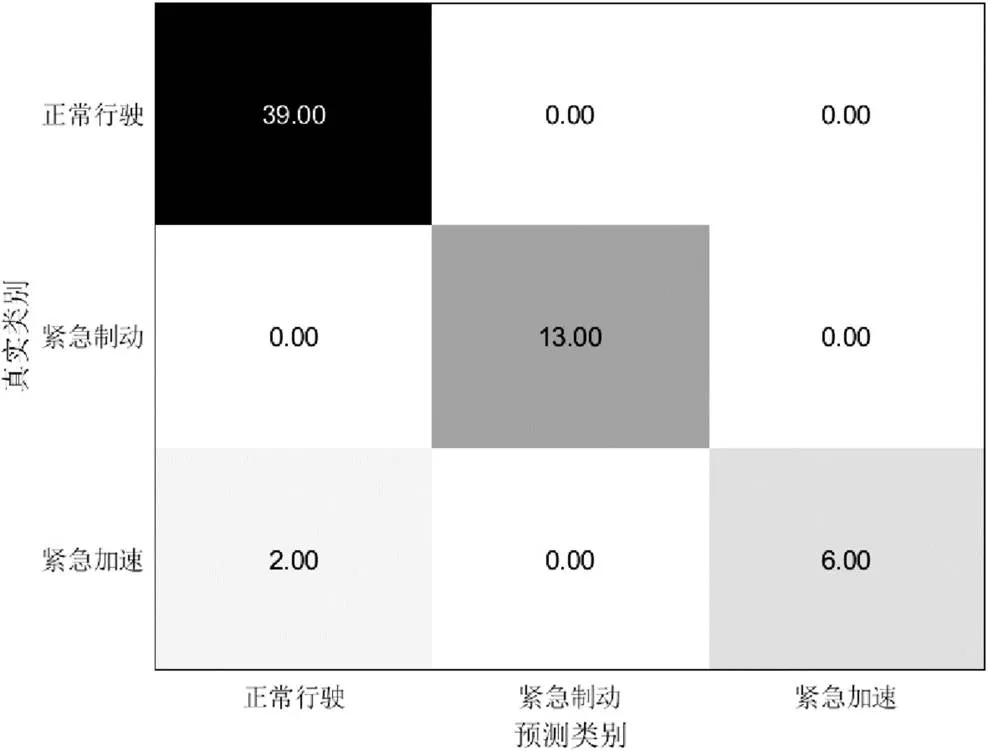
图6 混淆矩阵
表1是辨识模型的识别率。辨识模型对紧急加速和紧急制动的辨识准确率高达100%,整体识别率为96.67%,辨识效果非常好。实践证明,本文基于GRU网络建立的驾驶员操作行为辨识模型准确性好,能够成功辨识驾驶行为。
表1 辨识模型的识别率
驾驶行为准确率/% 正常行驶95.12 紧急加速100 紧急制动100 总识别率96.67
4 结论
辨识驾驶行为是提高交通安全的重点研究内容,目前,使用深度学习对驾驶行为进行识别的研究比较少。本文首次基于GRU网络建立辨识模型,用于以驾驶员操纵数据和车辆行驶状态数据为依据的驾驶行为辨识。利用驾驶模拟器采集的数据组成数据集对模型进行训练和测试,计算出驾驶员对车辆进行紧急加速、紧急制动和平稳直线行驶的识别率,模型整体识别率为96.67%。实验结果表明,该模型能够成功识别各类驾驶行为,辨识准确度高。
[1] SONG Weilong, XIONG Guangming, CHEN Huiyan. Intention- aware autonomous driving decision-making in an uncontrolled intersection[J]. Mathematical Problems in Engineering,2016, 2016:1-15.
[2] WANG Wenshuo, XI Junqiang. A rapid pattern-recognition me- thod for driving types using clustering-based support vector machines[J]. American Control Conference,2016:5270-5275.
[3] DANG Ruina, ZHANG Fang, WANG Jianqiang, et al. Analysis of Chinese driver's lane change characteristic based on real vehicle tests in highway[J].International IEEE Conference on Intelligent Transportation Systems.IEEE,2014:1917-1922.
[4] ZYNER A, WORRALLl S, NEBOT E. A recurrent neural network solution for predicting driver intention at unsignalized intersections [J]. IEEE Robotics and Automation Letters,2018,3 (3):1759-1764.
[5] JOAKIM A. Predicting vehicle motion and driver intent using deep learning[D].Gothenburg:Chalmers University of Technology, 2018:1-60.
[6] 惠飞,郭静,贾硕,等.基于双向长短记忆网络的异常驾驶行为检测[J].计算机工程与应用,2020,56(24):116-122.
[7] WANG Xiao,JIANG Rui,LI Li,et al.Capturing car-following behaviors by deep learning[J]. IEEE Transactions on Intelligent Transpor- tation Systems (S1524-9050),2018,19(3):910-920.
[8] WU Zhizheng,KING S.Investigating gated recurrent networks for speech synthesis[C].2016 IEEE International Conference on Acoustics,Speech and Signal Processing,2016:5140-5144.
[9] FAWAZ H I, FORESTIER G, WEBER J, et al. Deep learning for time series classification:a review[J].Data Mining and Knowle- dge Discovery,2019,33:917-963.
[10] Cho K,Van Merriënboer B,Gulcehre C,et al.Learning phrase representations using RNN encoderdecoder for statistical ma- chine translation[J].arXiv preprint arXiv:1406.1078,2014.
Research on Recognition of Driving Behavior Based on Gated Recurrent Unit
XUE Junjun, CHEN Shuang
( College of Automotive and Transportation, Liaoning University of Technology, Liaoning Jinzhou 121000 )
Accurate recognition of driving behavior plays an important role in vehicle driving safety. Aiming at the subjectivity and low recognition accuracy of current driving behavior recognition methods, this paper establishes a driving behavior recognition model based on the gated recurrent unit.The driving simulator is used to obtain driver manipulation data and establish a driving behavior data set. After the model is trained, it can effectively use the timing characteristics of the driver manipulation data to successfully recognize driving behavior. The recognition accuracy of the model reaches 95.24%, which provides important theoretical support for the field of traffic safety.
Driving behavior recognition; Deep learning; Gated recurrent unit
U471.15
A
1671-7988(2021)24-30-04
U471.15
A
1671-7988(2021)24-30-04
10.16638/j.cnki.1671-7988.2021.024.007
薛俊俊(1997—),女,硕士研究生,就读于辽宁工业大学汽车与交通工程学院,研究方向:车辆系统动力学及控制。
辽宁省高等学校创新人才计划。
猜你喜欢
汽车实用技术(2022年5期)2022-04-02
健康之家(2021年19期)2021-05-23
健康之家(2021年19期)2021-05-23
医学食疗与健康(2021年27期)2021-05-13
故事作文·高年级(2021年4期)2021-05-06
健康体检与管理(2021年10期)2021-01-03
创新时代(2017年10期)2017-11-09
中国高新技术企业(2017年5期)2017-05-05
软件(2016年6期)2017-02-06
物联网技术(2016年11期)2017-01-12
