
现代电动汽车旋变传感器原理及检测
2022-01-18 12:06:44华奇
汽车实用技术 2021年24期
华奇
现代电动汽车旋变传感器原理及检测
华奇
(江苏信息职业技术学院,江苏 无锡 214153)
现代纯电动汽车驱动电机普遍采用永磁同步电机,基于定向矢量控制技术,电机位置、转速传感器普遍采用磁阻式旋转变压器,旋变传感器信号需要通过R/D转换器处理,才能给DSP或MCU进行读取,旋变的信号对电机的控制精度非常重要。因此文章通过分析现代纯电动汽车驱动电机的控制方案,针对AD公司的解码芯片AD2S1205进行研究,该芯片采用Type II跟踪环路,环路连续跟踪旋变的位置和速度,而不需要外部转换和等待状态,具有系统故障检测,可以检测旋变信号的丢失,输入信号超范围或位置信号跟踪丢失。对采用该控制方案的现代纯电动汽车报旋变传感器故障,以吉利帝豪EV450纯电动汽车为例,对旋变系统的故障现象、故障产生机理、故障检测提供了完整的检修方案。
旋变传感器;R/D转换器;驱动电机;检修
引言
国内主流的纯电动汽车电机控制系统都是采用基于DSP芯片的控制系统,DSP芯片大都采用TI公司的TMS320系列,比亚迪E5纯电动汽车电机控制系统采用了基于TMS320 F28335芯片,基本控制原理见图1。DSP的高速计算能力,可以完成复杂的信号处理和控制算法,提高采样频率,控制电力电子外围设备[1],在此基础上可实现电机的高性能控制。电机控制专用DSP丰富的外围功能模块,为电机控制带来了许多的便利。如PWM模块,可产生高分辨率的PWM波形,并多达6路输出。针对永磁同步电机的矢量控制技术,电机位置传感器提供的电机转子的位置信息至关重要,直接影响了电机是否正常工作。旋转变压器作为电机位置信息传感器,可以适应车辆在恶劣环境下工作的稳定性和可靠性。
1 磁阻式旋变传感器的结构与工作原理
旋变传感器本质上是一个变压器,由定子和转子构成。在定子上装有励磁绕组和正弦、余弦绕组,在空间布局上,正弦和余弦绕组互差90度,转子和电机轴安装在一起,和电机轴同步转动,转子磁极形状做特殊设计,使得气隙磁场近似与正弦形。当转子转动时,会导致气隙中的磁导率发生变化,这个变化是周期性的,与转子的极对数是一致的。励磁线圈中输入恒定频率的正弦交流电,根据互感定律,在正弦和余弦线圈中会输出同频的正弦波,如图2所示。

图1 DSP实现的PMSM控制系统结构图
励磁输入电压公式:
=sin() (1)
正弦输出电压公式:
=sin()sin(2)
余弦输出电压公式:
=sin()cos(3)
其中,为旋变转子角度;为励磁载波频率;为励磁输入峰值电压;为旋变的变压比。
一般车用励磁线圈的信号频率在10 kHz左右,正弦和余弦和励磁信号同频,和转子的转速无关。转子的转速会导致正弦和余弦信号的幅值大小发生变化,正比于幅值大小变化的快慢。由于余弦线圈在空间上和正弦差了90度,两个信号的幅值大小相反,正弦幅值为零时,余弦幅值最大;余弦幅值为零时,正弦幅值最大,见图2线圈S和线圈C的波形。
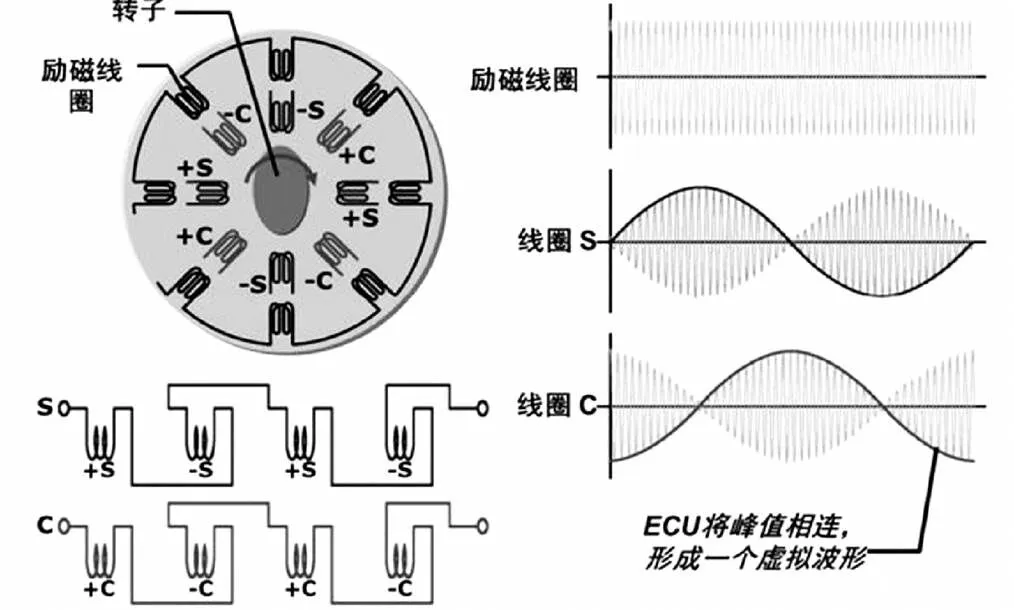
图2 旋变传感器构造与输出波形
在吉利EV450上实车检测的波形如图3所示。采用双通道示波器显示,绿色A通道是正弦绕组输出信号,黄色B通道是余弦绕组输出信号,信号频率10 kHz,最大值2.32 V,峰值相连的波形在相位上差了90度。
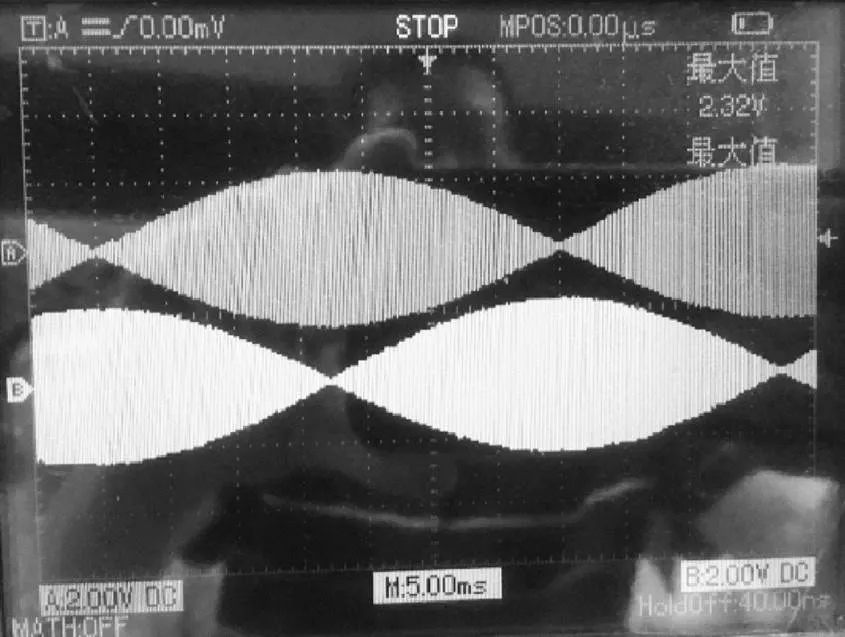
图3 吉利EV450磁阻式旋变正弦、余弦输出信号
2 旋变RDC转换器工作机理
2.1 旋变硬件解码转换器
现代电动汽车常用旋变-数字转换芯片RDC与旋转变压器传感器直接相连,主要围绕AD公司的解码芯片AD2S1200系列展开,以常用的AD2S1205为例,该芯片是一款完整的12位分辨率跟踪分解器数字转换器,内置可编程正弦波振荡器,为旋变提供正弦波激励,工作频率范围为8.192 MHz ±25%,该芯片采用Type II跟踪环路,可用于跟踪输入信号,最大跟踪速率为1 250 rps[2]。具有系统故障检测,可以检测旋变信号的丢失,输入信号超范围或位置信号跟踪丢失。正弦和余弦输人端支持3.15 Vp-p±27%的差分输入电压,可编程激励频率,利用频率选择引脚(FS1和FS2脚),可以轻松地将激励频率设置为10 kHz、12 kHz、15 kHz或20 kHz[3],引脚功能管脚图如图4所示。

图4 AD2S1205引脚图
2.2 AD2S1205转换器工作原理
AD2S1205采用Type II跟踪闭环原理工作。环路连续跟踪旋变的位置和速度,而不需要外部转换和等待状态。当旋变的位置旋转了相当于最低有效位的角度时,跟踪闭环输出更新1 LSB。转换器产生的输出角()反馈并与输入角()进行比较,借此来跟踪轴角(),两个角度之间的差异即误差,如果转换器正确跟踪输入角则该值趋于0[4]。为了测量误差,将S3−S1乘以cos,并将S2−S4与sin相乘。
in()×sincos(对于S3−S1) (4)
in()×cossin(对于S2−S4) (5)
二者的差值为:
in()×(sincos−cossin) (6)
利用内部产生的合成基准信号来解调该信号,得到下式:
(sincos−cossin) (7)
公式(4)等效于sin(−);当−的值(角误差)较小时,sin(−)约等于(−),其中−为角度误差,(−)是转子的角误差与转换器的数字角输出之间的差值[5]。
一个闭环系统由一个相位敏感的解调器、一些积分器和一个补偿滤波器形成,它可以将误差信号归零。当该目标得以实现时,在转换器的额定精度范围内,等于旋转角。之所以使用Type II跟踪环路,是因为它能跟踪恒定速度输入,而不存在固有误差。
AD2S1205将位置寄存器中的角度与来自旋变器的正余弦输入信号进行比较,产生一个监控信号。该监控信号的产生方式与“工作原理”部分所述的误差信号相似。输入的sin信号和cos信号分别与正弦输出角和余弦输出角相乘,再将乘积相加:
监控信号=(1×sin×sin)+ (2×cos×cos) (8)
其中:
1为正弦输入信号的幅度(1×sin)。
2为余弦输入信号的幅度(2×cos)。
表示旋变角度。表示存储在位置寄存器中的角度。公式(8)显示的是解调之后的情形,且载波信号sin()已被移除。此外,对于匹配的输入信号(即没有发生故障时),1=2。当1=2且转换器正确跟踪(因此,=)时,输出的监视信号的幅度为1(监控信号=(1×(sin2+cos2)=1)。当1≠2时,监控信号的幅度以两倍的轴旋转速率在1与2之间变化。监视信号用于检测输入信号是否降级或丢失。故障检测电路引脚说明见表1:
表1 故障检测电路引脚说明表
引脚编号引脚名称说明 29DOS信号降级。逻辑输出。当旋变输入超过规定的 DOS 正弦、余弦阈值时,或者当正弦输入电压与余弦输入电压之间出现幅度失配时,就会检测到信号降级。DOS 由 DOS 引脚为逻辑低电平来表示。 30LOT跟踪丢失。逻辑输出。LOT 由 LOT 引脚为逻辑低电平来表示
3 纯电动汽车旋变传感器的检修方法
现代纯电动汽车旋变传感器安装在驱动电机内部,旋变转子和驱动电机转子同轴,旋变硬件解码RDC转换器集成在电机控制器内部,并和电机控制专用DSP芯片数据通讯。以吉利EV450纯电动汽车为例:
3.1 故障现象
一辆2019款吉利帝豪EV450启动,上电指示READY灯不亮,车辆上不了高压电,动力系统故障警告灯点亮,车辆无法挂挡。连接道通908解码仪,对动力系统进行检测,读取故障码如图5所示。
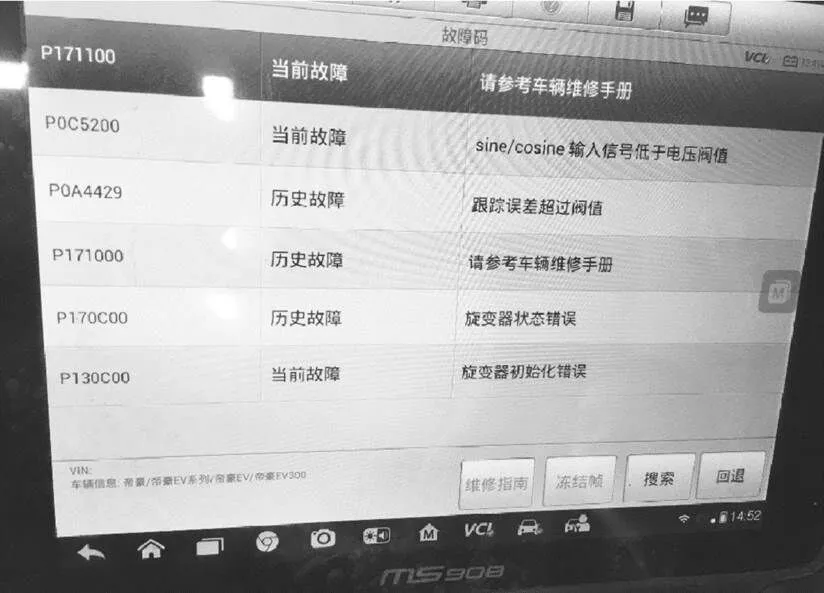
图5 吉利帝豪EV450旋变故障码
3.2 故障检测
旋变传感器的故障检测可以分为静态检测与动态检测。静态检测测量旋变内部励磁、正弦、余弦绕组的阻值是否符合厂家的标准值,三个绕组到电机控制器的线路连接是否正常。动态检测主要测量车辆旋变三个绕组输出的正弦波形是否正常,波形是否发生畸变,辐值变化是否在正常的范围内,频率是否符合标准。以吉利帝豪EV450为例,旋变传感器正常数据见下表。
表2 吉利帝豪EV450旋变传感器正常数据
车型2019款吉利帝豪EV450VIN码略 静态测量测量位置及参数标准值测量值结论 正弦绕组14.5±1.5 Ω14.2 Ω正常 余弦绕组13.5±1.5 Ω13.3 Ω正常 励磁绕组9.5±1.5 Ω8.9 Ω正常 动态测量测量位置及参数标准值测量值结论 EP11-15,22脚励磁波形正弦波,频率10 kHz,幅值10 V正弦波,无明显畸变,频率10 kHz,幅值10 V正常 EP11-17,24脚正弦波形正弦波,频率10 kHz,幅值0~2.5 V变化正弦波,频率10kHz,幅值−2.5 V~+2.5 V之间变化正常 EP11-16,23脚余弦波形正弦波,频率10 kHz,幅值0~2.5 V变化正弦波,频率10KHz,幅值−2.5 V~+2.5 V之间变化正常 测量位置波形测试结论 电机控制器端口EP11,使用三通道示波器,分别检测励磁、正弦、余弦波形下图中三条线,上方:励磁线圈;中间:正弦线圈;下方:余弦线圈正弦波形无畸变,频率、辐值正常正常
旋变传感器的6根信号线,任意一根出现断路或对地短路,或者出现互短,都会产生如图5所示的对应故障码。依据上表,完成静态测量和动态测量后,故障现象和故障码没有消除,可以确定电机控制器内部电路出现故障,需更换电机控制器总成。
3.3 故障排除与总结
找到故障点恢复后,需进行复检。车辆恢复,打开点火开关,车辆正常上电,可挂挡行驶,故障排除。连接诊断仪,再次读取故障码,清除历史故障码。最后要根据前面所讲的理论,总结故障原因,故障机理,诊断与排故流程,完成记录。
[1] 杜书杰.基于Popov超稳定性的矿用局部通风机矢量控制系统 的研究[D].西安:西安科技大学,2009.
[2] 曹艳玲.旋变位置解码系统的设计[J].电子世界,2013(19):132- 133.
[3] 王辰欣,洪俊杰,林万芳.AD2S1205在永磁同步电机驱动系统中的应用[J].电脑与电信,2012(09):26-28.
[4] 王玉珏,翁浩宇,张海勇,等.基于AD2S1210的电机解码系统设计[J].电子技术应用,2013,39(02):48-51.
[5] 吴成加,赵圣宝.旋变解码芯片AD2S1205应用系统设计[J].电子技术与软件工程,2014(20):258-261.
Principle and Detection of Resolver for Modern Electric Vehicle
HUA Qi
( Jiangsu Vocational College of Information Technology, Jiangsu Wuxi 214153 )
Modern all-electric drive motor widely used permanent magnet synchronous motor, based on the directional vector control technology, the motor position and speed sensor widely used magnetic resistance type rotating transformer, spin variable sensor signals need to deal with, through the R/D converter to DSP and MCU read, spin variable signal for motor control precision is very important. Therefore, by analyzing the control scheme of the drive motor of modern pure electric vehicle, this paper aims at the decoding chip AD2S1205 of AD company. The chip adopts Type II tracking loop, which continuously tracks the position and speed of rotation without external conversion and waiting state. It has system fault detection and can detect the loss of rotation signal. Input signal is out of range or position signal tracking is lost. Taking Geely Emgrand EV450 pure electric vehicle as an example, a complete overhaul scheme is provided for the fault phenomenon, fault generation mechanism and fault detection of the rotating system.
Resolver; R/D converter; Drive motor; Overhaul
U467; U463.6
A
1671-7988(2021)24-10-05
U467;U463.6
A
1671-7988(2021)24-10-05
10.16638/j.cnki.1671-7988.2021.024.003
华奇(1976—),男,高校讲师,就职于江苏信息职业技术学院,主要研究方向为新能源汽车技术。
猜你喜欢
中学生数理化·高一版(2023年3期)2023-03-23 01:34:42
新高考·高三数学(2022年3期)2022-04-28 08:41:42
四川工商学院学术新视野(2021年2期)2021-11-02 06:17:18
电子制作(2019年7期)2019-04-25 13:18:18
中学生数理化·高一版(2018年6期)2018-07-09 06:00:56
中学数学杂志(高中版)(2016年6期)2017-03-01 18:53:58
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27 06:31:40
职业技术(2015年8期)2016-01-05 12:16:46
电测与仪表(2015年16期)2015-04-12 00:44:26
声学技术(2014年1期)2014-06-21 06:56:26
