
回归反射球基准尺校准技术研究
2022-01-18 08:32王晓光佟向鹏郭力振王光明
宇航计测技术 2021年4期
王晓光 朱 浩 佟向鹏 刘 柯 郭力振 王光明
(1.北京航天计量测试技术研究所,北京 100076;2.海军装备部驻北京地区第一军代表室,北京 100076)
1 引 言
数字近景摄影测量技术利用单台或多台相机获取被测物的多角度图像,通过图像处理获取被测物的三维几何量信息,具有测量范围大、精度高、非接触等优点,在航天、航空、汽车等诸多领域有着重要应用。
一般来说,数字近景摄影测量系统需要一个已知长度的基准尺将空间尺寸信息赋予摄影测量系统,从而实现通过照片确定被测物的几何参数。实际上,许多三维测量设备如激光跟踪仪、激光扫描仪、经纬仪测量系统等都需要基准尺对测量系统进行校准。
基准尺作为长度基准,它的测量精度对数字近景摄影测量系统的测量结果有直接影响。为保证其结构稳定性,基准尺通常由碳纤维、铟钢等材料制成,在基准尺的两端装有特征标志点,两特征标志点之间连线的长度表征了基准尺的长度。回归反射球基准尺的名义值由两端回归反射球球心连线确定。回归反射球是一种涂有玻璃微珠的球体。这种结构的最大特点是具有定向反射作用,即照射到反射球上的光线将会沿入射方向返回。利用这一特点,在校准摄影测量系统时,配合主动照明装置,获得的图片中回归反射球具有非常明亮的轮廓,可以很容易地从图片中提取反射球轮廓并确定球心,实现对摄影测量系统的校准。相比于平面标志点,回归反射球在各个方向的投影都是圆形,因此在确定其球心时有更高的精度。
本文设计了一种回归反射球基准尺校准系统,建立了由三路激光干涉仪、高分辨率双远心成像瞄准模块、高精度直线气浮导轨等组成的测量系统。对名义值为500mm、1000mm、1500mm、2000mm的4种规格回归反射球基准尺进行了长度测量实验。
2 基准尺校准装置组成
基准尺校准装置总体结构主要由回归反光球光学中心瞄准装置、基准尺方向调整机构、激光干涉测长装置、精密气浮平移台组成,如图1所示。工作时,首先调整被校基准尺的位姿。被校基准尺放置在位姿调整模块上,利用瞄准模块分别获得两个反射球球心的空间位置,位姿调整模块沿Y、Z两个方向平移调整基准尺的位姿,使基准尺的两个回归反射球球心连线与气浮平台运动方向(X轴方向)平行。
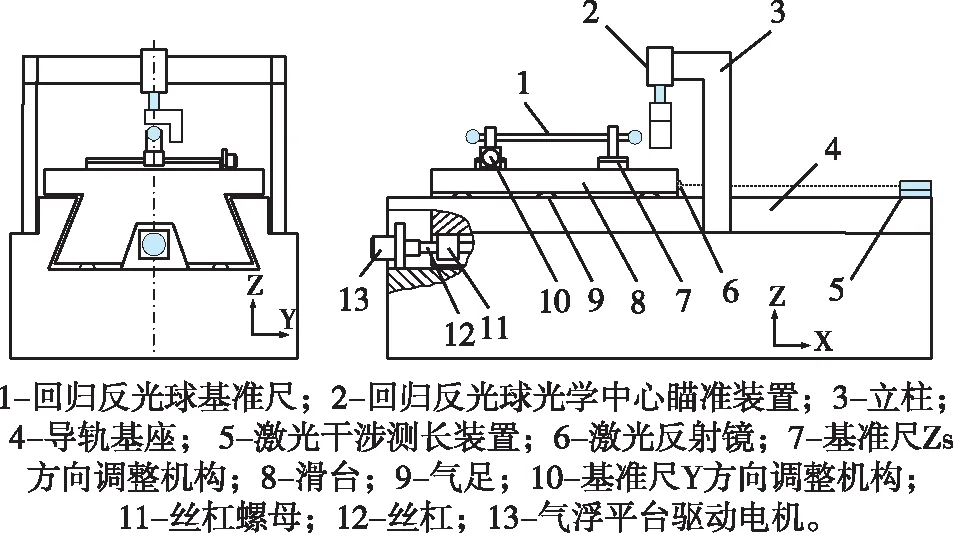
图1 基准尺校准系统示意图
位姿调整完成后,进行基准尺的校准。首先移动气浮平台使基准尺一端的回归反射球进入高分辨光学成像系统的视场范围内,并大致位于图像中心位置。待系统稳定后,通过图像处理计算出球心坐标作为参考点,同时记录激光干涉仪的读数L
。然后移动气浮平台,使基准尺另一端的回归反射球进入高分辨率成像系统的视场内,实时计算回归反射球的球心位置坐标与参考坐标之间的差异,并将这一差异反馈给气浮平台运动控制系统。精密调整气浮平台位置直至球心位置坐标到达参考坐标,记录此时激光干涉仪的读数L
。这样基准尺的长度L
为:L
=|L
-L
|(1)
3 误差分析
3.1 回归反射球瞄准误差
回归反射球瞄准模块如图2所示。高分辨率光学相机由 1倍双远心镜头和大靶面工业相机组成。工业相机像元尺寸为(5.5×5.5)μm,靶面像元数6576×4384,像面尺寸(36×24)mm。采用同轴光源对目标照明,半反半透镜将光路一分为二,配合平面反射镜可分别对回归反射球沿Z方向和Y方向进行拍摄。为了避免图像混叠,一个方向进行拍摄时,另一个方向要遮挡光路,保证图像的对比度。
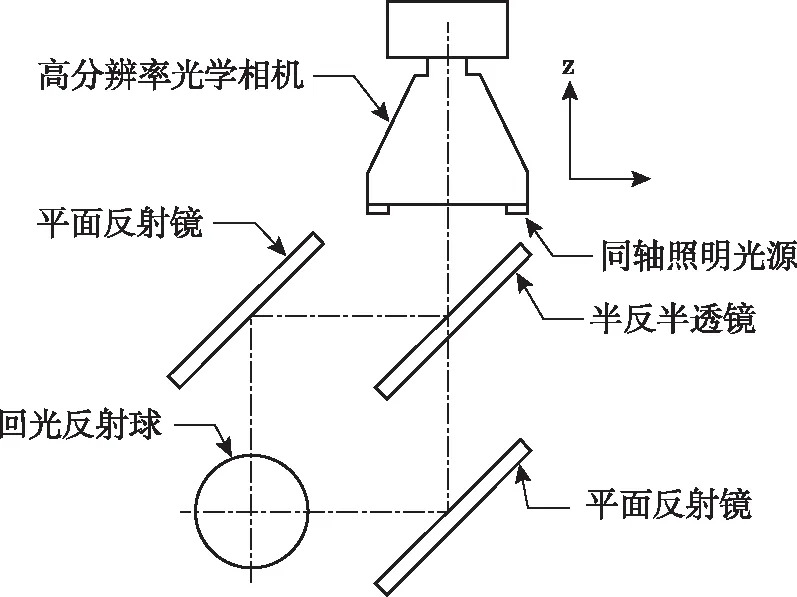
图2 回归反射球瞄准装置
光学相机获取回归反射球图像后,通过图像处理与特征提取,获得球心的位置信息。在图像质量理想的情况下,球心解算误差Δ
可达到0.1个像素,因此物方测量误差Δ
为:
(2)
其中:β
——相机的放大倍率。3.2 球杆位姿调整误差
在实际测试过程中,基准尺两个回归反射球的中心连线方向与气浮运动平台的运动方向(X
方向)存在偏差,实际测量得到的L
为基准尺在X
方向的投影长度。δD
、δP
分别为位姿调整误差,由球心瞄准精度和电动平移台调整精度共同决定。
图3 基准尺位姿调整误差示意图
瞄准模块将采集到的反射球位置信息返回给位姿调整模块,形成闭环控制。位姿调整机构采用精密电动位移平台带动基准尺沿Y、Z方向移动。电机通过细分控制,分辨率可以达到0.15μm。根据经验δD
=δP
=1μm。对于标称长度500mm以上的基准尺,|L
-L
|<0.01μm,满足测量准确度要求。3.3 气浮平台直线度误差
采用精密气浮导轨能降低运行过程中的直线度误差,但在精密测量领域仍然需要对导轨运动的直线度误差进行补偿。
导轨直线度误差包含水平和垂直两个方向,直线度误差补偿技术原理如图4所示。沿导轨移动方向架设三路激光干涉仪靶镜,其中两路水平布置,第三路垂直水平布置连线中心。被测基准尺置于气浮滑台上。M
与M
水平距离为L
,M
与M
M
连线垂直距离为L
,球杆中心与M
水平距离为L
,与M
垂直距离为L
,将模型进行归一化处理,以M
测量值为参考,M
1~M
3干涉仪的位移测量值分别为D
~D
,通过阿贝误差补偿后,该误差分量很小,基准尺实际测量值为: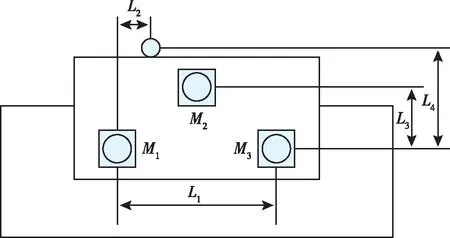
图4 阿贝误差补偿示意图

(3)
4 回归反射球基准尺长度测量不确定度评定
4.1 测量实验
采用美国安捷伦公司HP5519型双频激光干涉仪作为精密位移测量机构,对自制名义值为500mm,1000mm,1500mm,2000mm四种规格的回归反射球基准尺进行校准实验,每种规格各测量10次。实验室条件和测量结果分别记录在表1中。

表1 实验数据
4.2 测量重复性引入的标准不确定度分量u1
u
采用标准不确定度A类评定方法评定。在重复性测量条件下,对表1数据进行处理,得到实验标准偏差,则重复性引入的标准不确定度分量见表2。
表2 测量重复性
4.3 基准尺检定装置引入的标准不确定度分量u2
根据校准证书,回归反射球基准尺检定装置测量不确定度:U
=(0.2+0.2×10L)μm,k
=2。由此引入的标准不确定度分量可用B类评定方法按公式(4)计算。u
=U/
2=(0.
1+0.
1×10L
)μm(4)
4.4 基准尺温度引入的不确定度分量u3
设基准尺温度测量仪器MPE值为:±0.1℃,按均匀分布考虑,基准尺线膨胀系数为0.3×10℃,则有:

(5)
4.5 基准尺材料线膨胀系数引入的不确定度分量u4
基准尺线膨胀系数的允许误差为0.1×10℃,按等概率分布,基准尺温度与参考温度20℃之差按1℃估计。则有:

(6)
4.6 合成标准不确定度uc(ΔL)
各不确定度分量相互独立不相关,因此合成标准不确定度按公式(7)计算:

(7)
对于回归反射球基准尺,有:



4.7 扩展不确定度U(l)
扩展不确定度U
(l
)按公式(8)计算。U
(l
)=ku
(l
),k
=2(8)
式中:k
——包含因子。对于回归反射球基准尺,有:
L
=500mm时:U
(l
)=ku
(l
)=2.
4μmL
=1000mm时:U
(l
)=ku
(l
)=2.
4μmL
=1500mm时:U
(l
)=ku
(l
)=2.
8μmL
=2000mm时:U
(l
)=ku
(l
)=2.
8μm5 结束语
针对回归反射球基准尺结构特点研制了基准尺长度校准装置。采用高分辨率双远心成像系统对反射球进行瞄准定位,高精度直线气浮运动平台带动基准尺移动,三路激光干涉仪消除阿贝误差测长。对名义值为500mm、1000mm、1500mm、2000mm的4种规格回归反射球基准尺进行了长度测量实验及不确定度评定。结果表明该方法可以有效地解决摄影测量用的回归反射球基准尺尺长校准难题。
猜你喜欢
好日子(下旬)(2020年6期)2020-08-04
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
作文大王·低年级(2017年11期)2017-12-05
中学生数理化·八年级物理人教版(2017年2期)2017-03-25
学苑创造·A版(2017年1期)2017-01-19
中学生数理化·七年级数学人教版(2016年6期)2016-05-14
数学大王·低年级(2016年3期)2016-03-11
读者·校园版(2015年7期)2015-05-14
现代农业研究(2014年7期)2014-06-20
