
顾及点云邻域特征的道路里程推算方法实现
2022-01-17 06:37王来强宋华明
地理空间信息 2021年12期
李 彬,王来强,范 琳,宋华明,卢 彬
(1.青海省地理空间和自然资源大数据中心,青海 西宁 810001;2.青海省地理空间信息技术与应用重点实验室,青海 西宁 810001;3.青海省自然资源遥感中心,青海 西宁 810001)
高速公路是国家基础设施建设的重要组成部分,其里程长度是衡量公路建设发展规模、交通运输网密度的重要指标。准确的公路里程数据和里程桩点空间位置不仅影响精准养护和精准收费管理,也可在遇险报警时准确锁定位置提供救援服务。传统道路累计误差小于±3 m/km 的精度要求,很难满足现阶段高速公路运维管理要求[1],解决施竣工图件计算路程测量误差累积、光电编码器测量[2-3]实际车行轨迹与中心线偏差等是目前面临的问题。基于此,马荣贵[4]等以GPS、陀螺仪结合道路视频方法建立公里桩号和GPS 信息对应表,完成公里桩的精确定位;谢煜[5]等结合CORS和移动测量技术,人工采集特征点线完成里程测量;姚利辉[6-7]等利用遥感卫星影像提取道路定位演算公路里程也应用到工程实践。考虑高速公路里程测绘作业面窄、里程长等特点,本文提出基于车载特征线性点云自动提取的公路里程推算方法。
1 高速公路里程推算方法
对数据量大、密度分布不均的车载激光点云进行预处理,设置轨迹线角度阈值和距离阈值过滤噪点,根据布料模拟滤波算法快速分离地面、非地面点云。以点云强度信息为标量分割地面点云并结合空间邻域特征优化分割结果[8],采用八叉树连通聚类方法提取标线。在此基础上内插道路中心线并基于线性参考信息实现公路里程推算,如图1 所示。
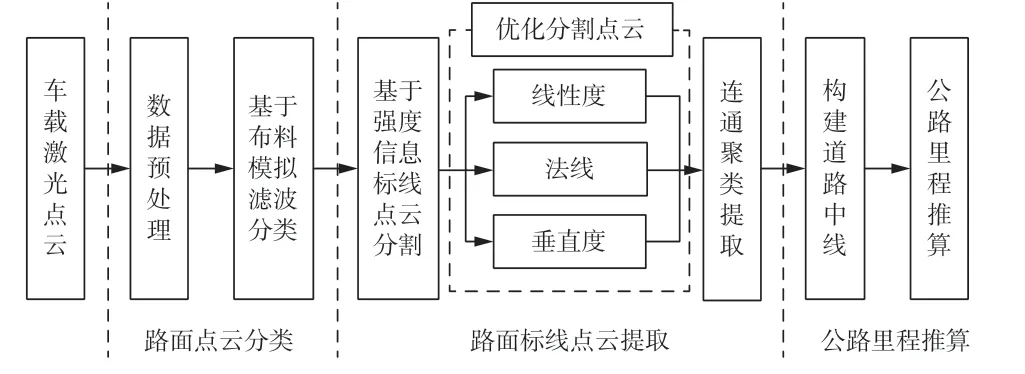
图1 车载特征点云推算公路里程流程
1.1 基于布料模拟算法的地面点云提取
车载移动测量采集获取包括道路沿线路面、交通标识线、护栏、路灯、指示牌等全要素点云数据,为便于识别路面线性特征点云,考虑将车载点云分类为地面点云和非地面点云。本文采用布料模拟滤波算法(CSF)构建虚拟路面模型,快速分离路面点云。布料模拟算法[9]基本思想为翻转车载激光扫描点云,根据给定网格间距构造布料模型,假定柔软布料受重力作用附着于翻转点云表面,最终形成的布料形状即为路面形状。布料假设由相互连接的质点弹簧模型节点构成,布料点在受重力作用后会产生线性位移,布料点位置和重力关系如式(1)所示。

通过设定初始节点位置和时间步长确定当前点位置,式(1)中X为节点在某时刻空间位置;Δt为时间步长;G 为重力常数;m 为布料点质量,通常取常数。
布料点在重力作用下产生位移,到达点云后布料点被标记为不动点,剩余标注为可动点。若两相邻节点均为可动点且高程值不同,则两点在垂直方向以相反位置移动相同距离;若两点间存在一不可动点,则移动可动点;若两点高程一致则不移动,直至完成迭代计算。为限制在翻转点云表面空白区域可动点的移动量,需考虑布料点受邻近节点作用力大小。可以将地形类型分为平坦、缓坡和陡坡,对应节点修正量为两点间距(VD)的1/2、3/4 和7/8。布料点位移修正值按式(2)计算:
布料网格大小、布料点间作用力大小及点云分类阈值是算法完成的基础变量[10-11],本文对高速公路点云进行CSF 滤波,选取网格分辨率为2 m;选取地形类型为缓坡;考虑路面存在道路护栏、行道树等点云,地面点和非地面点设置阈值设为0.5 m;迭代次数设置为200 次,滤波分类点云如图2 所示。
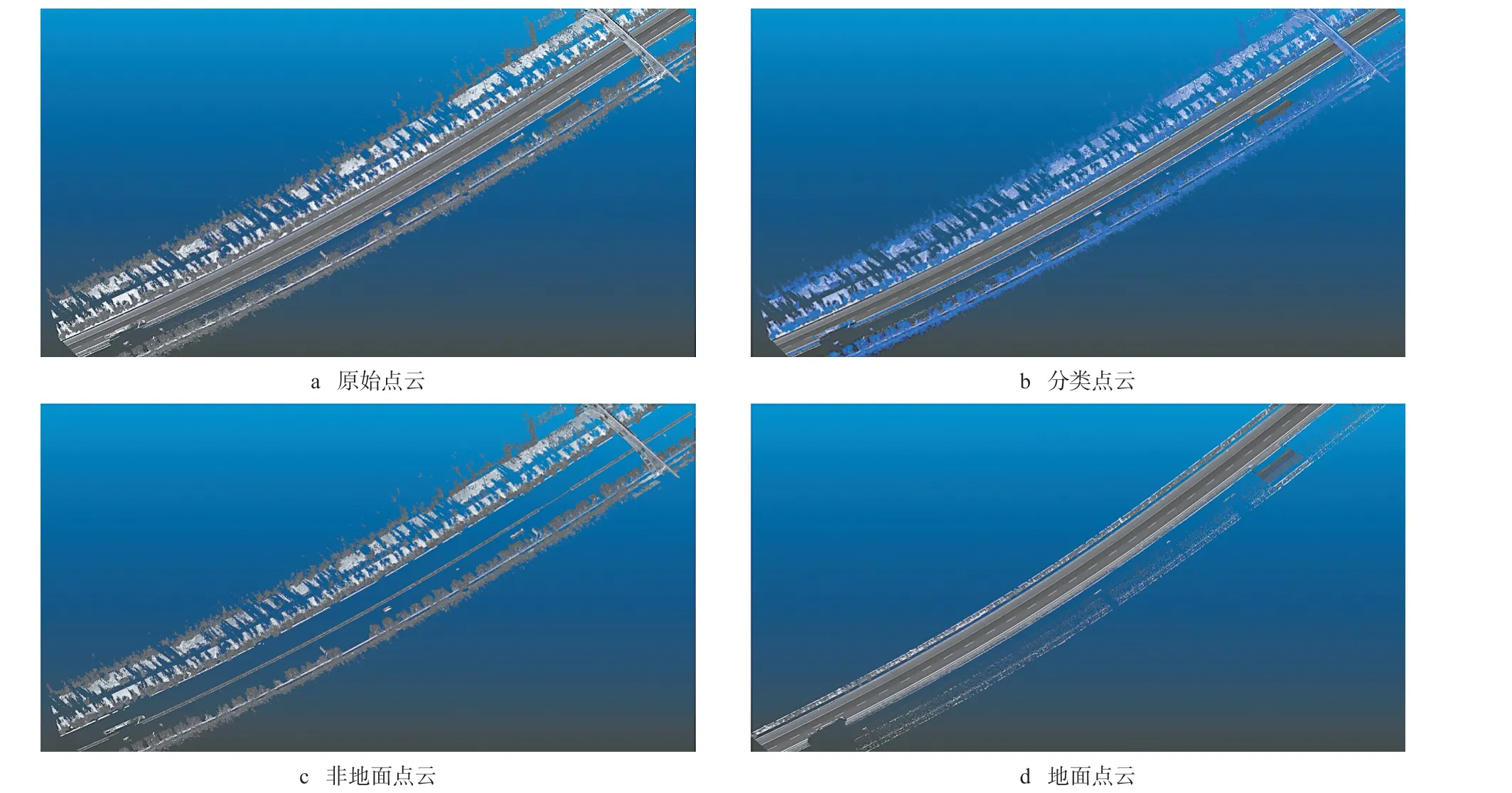
图2 布料模拟算法点云分类
1.2 顾及领域几何特征的道路标线分割
根据地面分类点云并顾及点云强度信息和几何特征,自动完成道路特征标识线点云分割。因存在出入匝道、避车道、会车道等道路面宽度差异变化,本文以路面标示线为提取特征线,构建轮廓面内插偏移出路面中心线,以此为线性参考推算里程长度。设置地面点云强度信息阈值分离线路标线点云[9],如图3所示。

图3 强度阈值点云分割
在上述点云分类过程中不可避免地存在同谱异物现象,且随扫描线距离增加而衰减、入射角差异等存在标线点云同物异谱现象,直接以强度信息分类受噪点干扰强,很难准确提取标线点云。在强度信息分类基础上,对点云定义一个或多个考虑点云空间位置信息的语义标签,给定距离阈值构建点云邻域空间,提取点云空间位置信息的几何特征,并将特征值赋值到相应语义标签中。算法分析种子点局部邻域内所有三维点的空间分布,计算每个点几何特性的不变矩阵及其三维结构张量的协方差矩阵,得到具有λ1≥λ2≥λ3≥0的结构张量特征值λ1、λ2和λ3直接用于描述点云局部三维结构[12]。考虑地面点云线性分布特征,本文引入点云线性度(Linearity)Lλ和垂直度(Verticality)
[13],计算公式如(3)、(4)所示。

邻域V大小对线性度计算差异大,考虑道路标线宽度为0.2 m,本文分别选取邻域半径0.1、0.3 和0.5作为因子计算线性度(Linearity)Lλ,邻域半径为0.1时点云空间线性度相关性小,半径为0.5 时因邻域半径过大部分特征点云线性特征值准确度降低,本文选取邻域半径为0.3 时得到最优线性度值为标量提取点云,提取线性度特征标量如图4 所示。
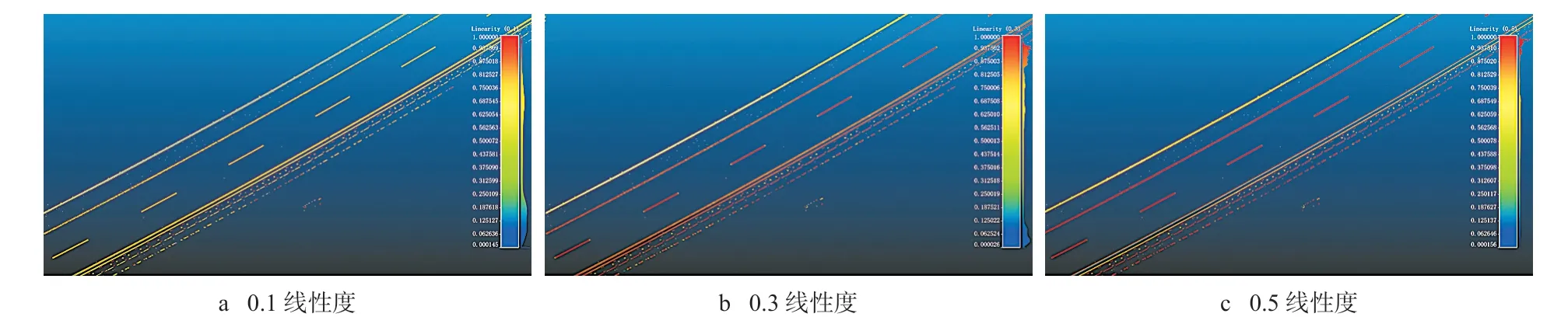
图4 不同线性度点云标量值图
点云法线改变速率(normal change rate)特征可以有效滤除路旁低矮灌木点云,部分线路路缘石强度、线性度和标线特征相近,以点云垂直度特征(verticality)为标量可以优化分割点云,如图5 所示。经几何特征优化点云提取结果,以统计异常值滤波使用点数计算平均距离估计,过滤噪点。
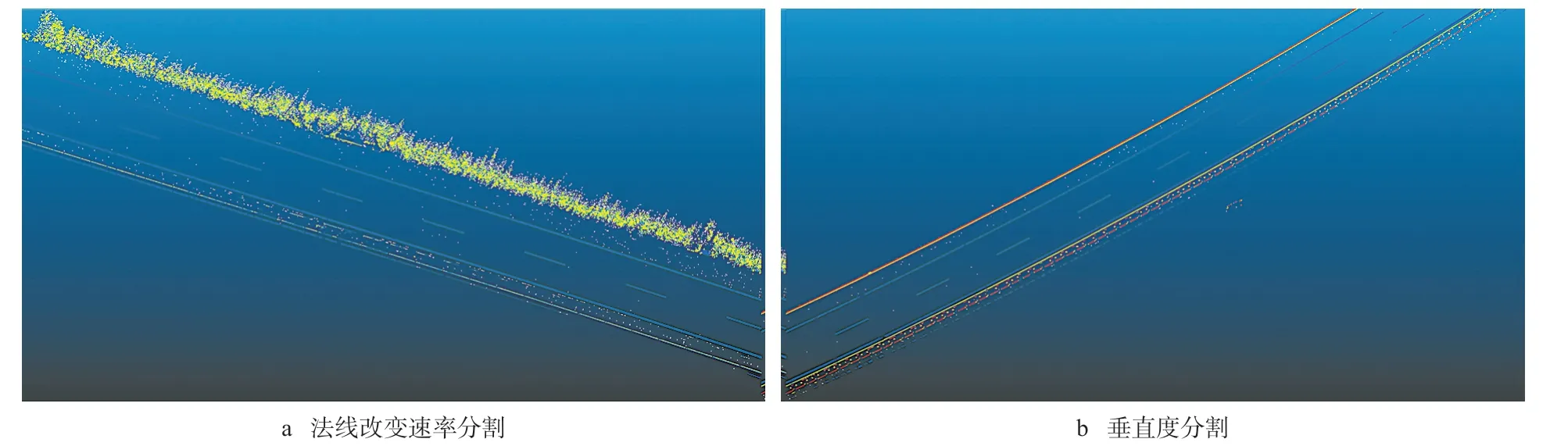
图5 法线改变速率和垂直度标量分割
八叉树(octree)是描述三维空间的树状数据结构,每个节点标识为正方体体积元素,各节点有8 个子节点。其基本原理为设置最大递归深度、找出场景中最大尺寸建立种子立方体、将单位元元素逐渐细分放入被包含且没有子节点的立方体、直到达到最大递归深度。本文以八叉树分割三维空间,进行点云连通分支聚类分析并依据设置点云阈值提取线性标线。研究设置递归深度为13 级、边长为0.12 m,点云阈值为200,提取点云标识线如图6 所示。
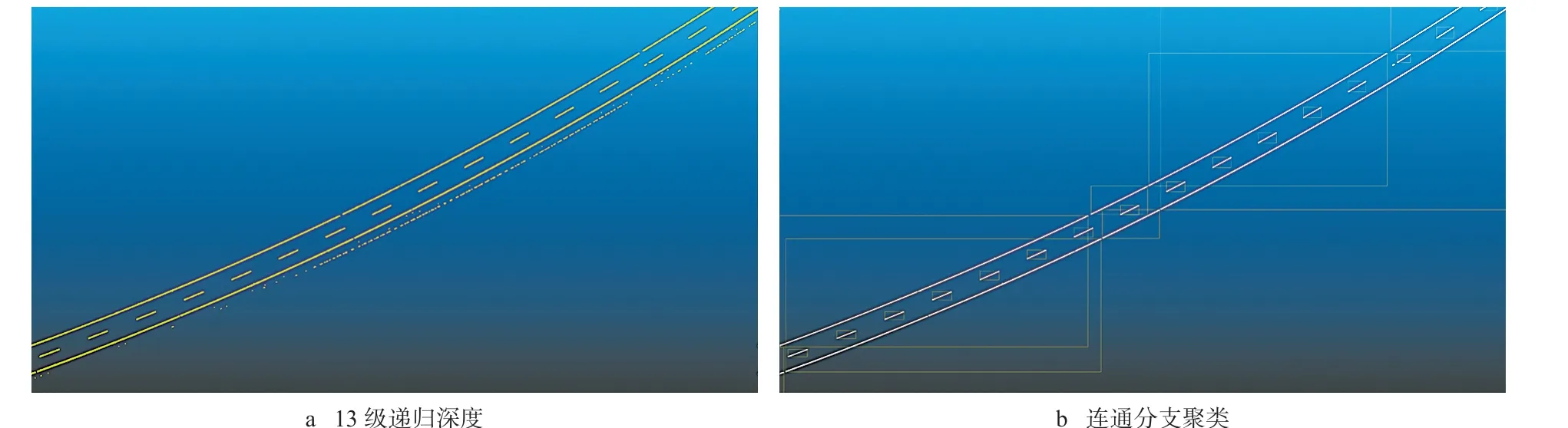
图6 八叉树连通聚类点云提取
1.3 公路里程推演
点云遮挡是公路采集普遍存在的问题,本文以道路标线特征点云提取路面中心线,会因为聚类点云不连续以致构建路面轮廓不完整,需对路面边界优化处理[14-15],参考对侧点云线性矢量方向修复道路标识边线,如图7 所示。在ArcGIS 中根据标识边线提取中心线,并分析两标线到路面边线的距离偏移出路面中心线,建立公路里程推算线性参考。
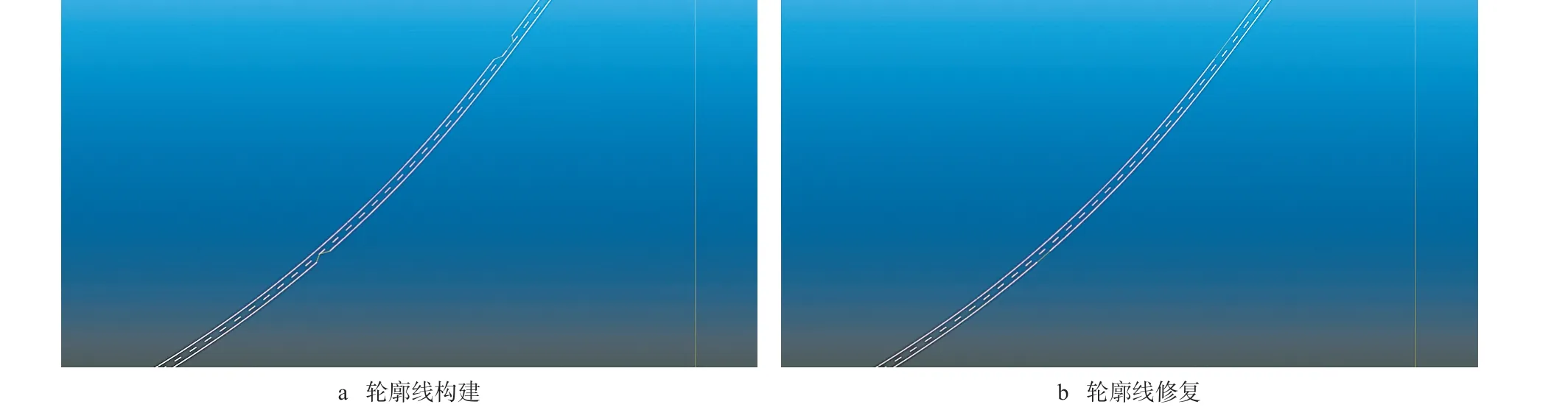
图7 点云轮廓线构建和轮廓线修复
道路交通通常不用空间位置坐标而用公路里程长度来标识道路位置[16],里程推算以里程起点为基准,以路面中心线为线性参考推算起点距指定间距的里程桩点集,考虑里程起点不为整公里桩号的情况,本文将起点里程差和里程间距作为变量。在ArcGIS 中创建程桩点推算提取脚本工具,生成ArcToolbox 工具箱。首先给定中心线投影坐标信息,使用PositionAlongLine方法计算并返回PointGeometry 类里程桩点。
2 应用实例
本文以甘肃省190 km 某高速路段为实验对象,通过Iscan-S 车载移动测量系统采集激光点云数据[17],获取包括道路面、护栏、车辆、护坡和植被等地物点云数据,获取点云数据量超过200 G。车辆载体以60 km/h速度行驶,激光扫描仪扫描频率为200 HZ,点云分辨率约8 cm,道路标识线清晰、明显,满足分析提取要求。单GNSS 基站数据处理模式可得到cm 级的定位精度[18],但考虑基站架设时间长、覆盖半径小等因素,本文收集覆盖任务区6 个CORS 基准站采集期间GNSS 观测数据,采用In-Fusion SmartBase 差分处理技术解算POS 数据,可得到70 km 内3~10 cm、70 km以上10~15 cm 的轨迹精度[19]。通过数据融合得到高斯三度带投影坐标系点云成果,以每10~15 km 采集检查点对云数据精度验证,点云精度优于±15 cm。
对点云工程按照2 km 距离进行分段以控制处理数据量,采用布料滤波模拟算法分类车载点云时,考虑道路坡度变化,根据不同地形类型分别采用平坦、缓和及陡峭3 种布料硬度分类策略,对部分路段点云分类错误采用后处理滤波算法优化地面点云[9]。地面点云强度信息标量阈值为20 000;线性度邻域值为0.3 m、标量阈值为0.65;垂直度邻域值为0.3、标量阈值0.05;八叉树递归深度为13 级、边长0.12 m、连通点云阈值为200,提取部分标线点云如图8 所示。
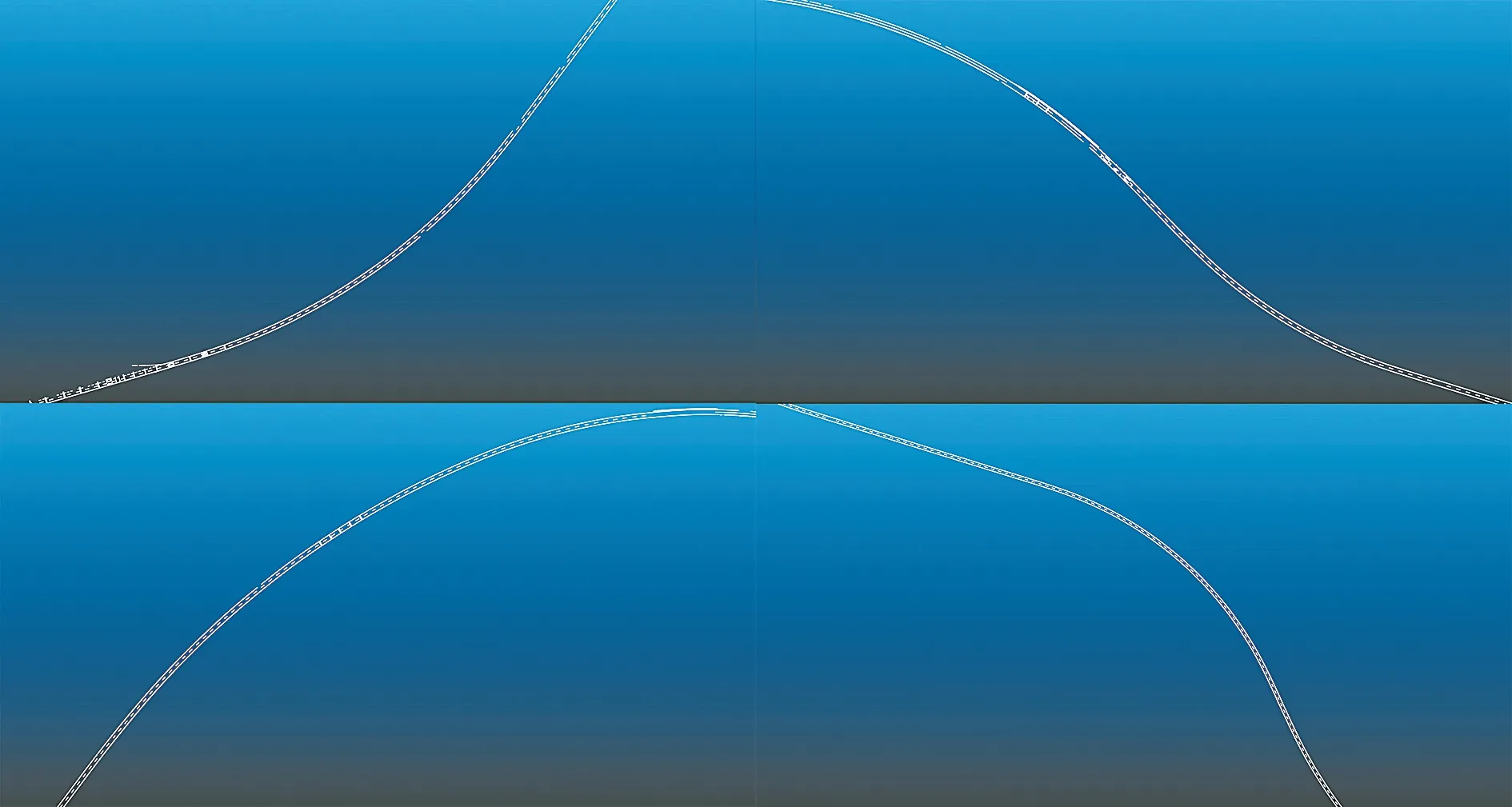
图8 部分路段标线点云
根据道路标识线点云构建标线边线并中线,考虑路面紧急停车带宽2.5 m,以提取标线中线为基础像外侧偏移1.25 m 得到路面中心线。在ArcGIS 下给定路面中心线投影坐标参考,项目公路里桩起点桩号为K1262+176,与整公里桩间差值为824 m,将起点里程差和里程间距分别输入提取里程桩点工具,快速获得里程桩点坐标成果及公路里程总长,如图9、表1 所示。
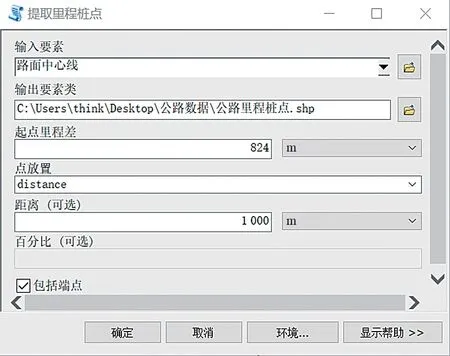
图9 提取里程桩点工具
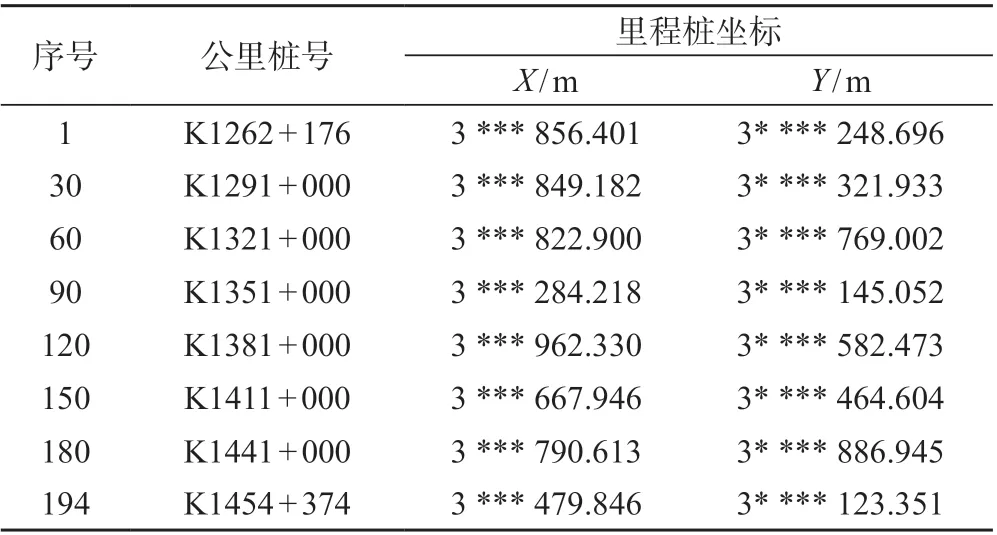
表1 公路里程桩点成果
3 结 语
公路里程作为高速公路重要定位参考,是公路基础地理信息化建设的重要组成部分。本文以车载激光点云为基础,通过提取道路实线标示线(提取道路中心线)实现了高速公路里程连续推算,相较传统公里里程传递方法可得到更高的里程推算精度。同时,项目提取高速公路外侧隔离护栏数据,计算里程桩点到护栏最近垂点,作为里程桩放样和埋设的依据,也成功运用到项目里程桩标识恢复工作中。
猜你喜欢
数学小灵通(1-2年级)(2022年3期)2022-03-17
中学生数理化·中考版(2021年9期)2021-11-20
山东冶金(2019年5期)2019-11-16
西南交通大学学报(2018年6期)2018-12-18
上海公路(2018年4期)2018-03-21
中国公路(2017年14期)2017-09-26
——目镜套筒
上海计量测试(2016年1期)2016-08-03
中外医疗(2015年5期)2016-01-04
爱你(2015年2期)2015-11-14
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
