电厂压力容器腐蚀超声相控阵检测自动扫查器设计
2022-01-17 08:56:00国核电站运行服务技术有限公司倪诗杰
电力设备管理 2021年15期
国核电站运行服务技术有限公司 倪诗杰 张 乐
压力容器是火电厂和核电厂不可或缺的主要设备,随着运行时间的增加,由于其内壁经受流体的冲刷,介质囤积微生物作用等原因,容易出现局部腐蚀缺陷,导致严重的危害性后果[1],严重威胁着设备的运行安全。超声相控阵技术在缺陷检出率、定量准确度和检测效率等方面具有显著的优越性,并且检测结果更加直观[2],因此,开发了一套手动腐蚀超声相控阵检测系统。
在经过一段时间的实际应用后发现,所采用的手动扫查装置存在一些缺点,导致扫查速度慢、效率低,并且在一些需要对腐蚀情况进行精确成像的应用场景中时,手动扫查无法提供一个稳定和高精度的扫查路径,极大地降低了腐蚀成像的精度,给后续分析人员对缺陷的评估带来了极大的困难,因此对针对于这类应用场景设计了一套用于腐蚀超声相控阵检测的自动化扫查装置。
1 扫查装置机械结构设计
1.1 手动扫查装置的缺点
目前所使用的腐蚀相控阵扫查装置为全手动操作,扫查装置主要由腐蚀相控阵探头和一个编码器构成,通过连接结构将两者固定,结构相对简洁,其主要优点有结构简洁小巧、便于携带、使用寿命长。但是,在经过多次现场应用后发现其存在的一些不足之处:
检测效率低。由于扫查装置仅配置了一个编码器,只能实施单线扫查,通过多次扫查合成实现区域腐蚀成像,导致效率低下。
扫查精度低。由于采用纯手动扫查,对大型容器扫查时无法保证精确的扫查路径,对腐蚀区域的精确成像造成影响。
操作难度高。手动扫查装置需要操作人员手持扫查并保持在X 方向直线移动,并且要求扫查时要满足程序要求的覆盖率,需要检测人员有较高的操作水平。
采集效果差。电厂压力容器检测环境较差,不依赖其他装置辅助进行手动扫查难以保证扫查的稳定性,经常出现丢帧、耦合不良等情况。
1.2 XY平台运动结构类型
在XY 运动平台中常用到的结构有龙门结构、单悬臂结构、十字滑台结构以及CoreXY 结构等。
龙门结构、单悬臂结构、十字滑台结构由于运动控制方式相对简单,结构刚度高,广泛应用于各类机床,而CoreXY 由于需要进行两轴联动控制,需要借助计算机运算控制,因此出现相对较晚。
1.3 扫查装置结构选择
腐蚀相控阵扫查装置的设计应满足以下性能指标:扫查速度达到150mm/s;定位精度及重复定位精度为0.1mm。
龙门结构、单悬臂结构、十字滑台结构以及CoreXY 结构均能满足上述性能要求。
在现场实际应用中,要求扫查器轻便易于携带,而单悬臂结构和十字滑台结构的刚性对精度有较大的影响。十字滑台结构扫查装置就是典型的单悬臂结构,由于其设计为了增加装置的便携性而牺牲了稳定性,导致在使用中悬臂不稳定,大大降低了扫查精度。除了结构的刚性,扫查时部件的高速运动也会对精度产生很大的影响,并且由于扫查装置的质心也在不断的变化,容易产生振动。在进行栅格扫查时会有急加速和急减速的过程,龙门结构由于步进电机是安装于X 轴并且随之一起运动,因此整个X 轴运动时惯性较大,导致产生较大的振动,严重影响精度。
CoreXY 结构相对紧凑,相同体积下可实现更大的检测范围,在轻量化方面有着一定的优势,由于载荷小,可以采用同步带传动,同步带相对于齿条和丝杠更适合应用在高速低载的扫查装置中。其不同于其他移动平台设计,双轴步进电机不随安装平台移动,减少了移动部件质量,降低了加减速过程中的冲击,使运动过程更加平稳,同时也降低了对电机驱动力的要求[3],可以选用更小型轻便的电机。
1.4 检测平台吸附装置
在试验阶段,真空吸盘在试板上可以牢固吸附,而在现场使用时吸附效果不理想,经过多次调整和排查,发现被检对象表面状态是影响吸附效果最大的因素,腐蚀相控阵检测对象多为碳钢容器,为防止外表面锈蚀需要涂一层防锈漆,检测时需要进行打磨除漆作业,打磨后的工件表面条件并不能使真空吸盘完全吸附。
针对于碳钢容器,吸附装置采用磁性吸附方案,同类装置多采用永磁式吸附,永磁吸附有无需额外电源、吸附稳定等优势,但实际检测环境中存在大量打磨留下的铁屑,被永磁铁吸附后难以去除,影响扫查装置寿命。因此采用电磁铁方案代替永磁铁,为防止产生人员触电风险以及满足容器作业电源电压低于36V 的要求,选用24V 电磁铁作为检测平台吸附装置。
2 CoreXY 结构特点和运动分析
2.1 CoreXY 结构特点
CoreXY 结构独特之处在于步进电机都固定在机架一侧,无论运动机构沿X 轴还是沿Y 轴向运动,两个电机都不会随着机构运动,因此减轻了扫查装置在运动过程中的负担,使检测平台移动更加平稳。
CoreXY 结构通过两个步进电机协调运动,可实现X 轴和Y 轴的移动。通过两根同步带实现动力的传动,这种传动方式可以有效减轻振动,且避免了丝杠机构、步进电机增加的额外负担,使整体结构更加轻量化,运动更加灵活稳定,能够在一定程度上提高检测的工作效率。
2.2 CoreXY 运动分析
平台在X、Y 两个方向的位移∆X,∆Y 与两个步进电机M1、M2的线位移∆A、∆B 之间的关系如式(1)和(2)所示:

解方程式可得:

上式中:∆X、∆Y 分别为扫查装置检测平台分别沿X 正方向和沿Y 正方向的位移,∆A、∆B 分别为步进电机M1、M2的线位移,∆A、∆B 的方向以顺时针为负、逆时针为正。
当步进电机M1和M2同时以相同的速度顺时针或逆时针转动时,∆A、∆B 的大小、方向相同:
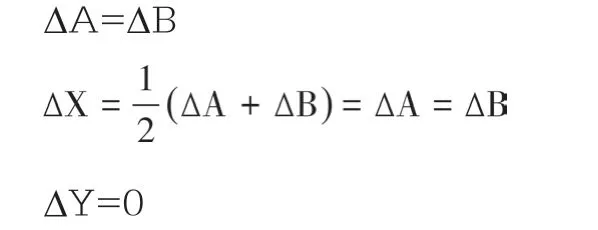
因此检测平台就会沿X 轴方向水平运动。
当步进电机M1和M2以相同的速度、相反的方向转动时,机构的滑块就会沿Y 轴方向运动,∆A、∆B 的大小相同,方向相反:
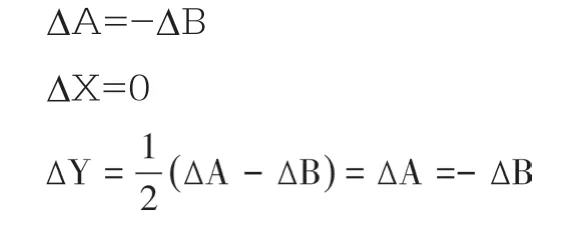
因此检测平台就会沿Y 轴方向水平运动。
通过以上公式对腐蚀相控阵扫查装置检测平台进行运动分析可知,改变两个步进电机方向即可控制平台在X 轴Y 轴的运动,实现线性扫查和栅格扫查。
3 扫查装置电气及控制系统
3.1 供电系统
扫查装置主要用电设备有不间断电源、采集电脑、步进电机、电磁铁、控制器以及一些系统辅助设备。
3.1.1 低压供电
扫查装置常用于金属容器的检测,为避免出现触电事故以及满足厂房用电相关要求,供电系统采用24V 直流电作为工作电压。
3.1.2 电源冗余系统
根据以往的检测经验,现场检测时常会遇到意外断电的情况,有非人为因素,如电源损坏、设备跳闸、非计划断电等。更多的是人为原因,经常发生误拔电源线的事故,并且检测装置使用电磁铁作为吸附固定装置,一旦失电将失去磁力导致扫查器坠落,容易出现设备损坏和人员受伤情况。
因此采用电源冗余系统,在主电源意外失电后备用电源立刻工作,防止断电出现事故。
3.2 控制系统
3.2.1 运动控制系统
采用GRBL 作为扫查装置的运动控制系统。
GRBL 是由德国团队开发的嵌入式运动控制系统,它是一款开源的控制系统,能够解析目前在数控领域使用的标准G 代码[4],实现对两轴至六轴步进电机的运动控制。GRBL 可以对运动轨迹进行提前计算和规划,这样使得检测平台运动轨迹更加平滑,移动更加平稳。
由于是开源系统,可以对代码进行一些适应性修改,使这套系统能更好应用于腐蚀超声相控阵检测自动化扫查装置。
3.2.2 运动控制器硬件组成
主控芯片采用ATmega328,该单片机是8位CPU,包括片上32kB Flash、2kB SRAM 和1kB EEPROM,运行频率可达20MHz。
采用雷赛CME 系列闭环步进电机,具有转矩大、发热小、平稳性好等优点,后端安装了双通道光电编码器,可提供稳定可靠的位置反馈信号。
4 扫查装置优势
4.1 维护成本低
考虑到现场恶劣的使用环境容易造成装置损坏,设计中易损件尽量采用标准件,如扫查装置主体框架采用2020系列铝型材、同步带和同步带轮选用2GT 系列和MGN9系列直线导轨,电气设备也是常见非定制产品,因此在后续维护时可有效降低成本,并且均为标准件易于采购,避免出现因缺失配件导致整套装置无法使用的情况。
4.2 模块化组合
腐蚀超声相控阵检测自动化扫查装置扫查范围取决于外部框架尺寸和直线导轨长度,通过定制一系列不同尺寸的框架和导轨,像搭积木一样用连接件将它们拼接起来,通过不同的排列组合,可适应各种检测对象。
4.3 多功能拓展
采用了模块化设计也带来了在此基础上增加其他功能的优势,可以设计不同的检测模块,如电磁超声模块、涡流探头模块、TOFD 模块等,使用同一平台实现不同检测,并且控制器也可以加载不同程序实现所需的扫查路径。
5 测试结果
制作了一套缺陷模拟试块对手动检测和自动检测效果进行对比。
检测速度:单一工件检测中,手动检测在速度优于自动检测,自动检测需要设置的参数较多,而当设定完参数即可批量对零件进行检测,检测效率对比手动检测有显著提高。
检出效果:检测人员的操作水平对手动检测效果有较大影响,自动检测由于是全程自动化,不受操作人员水平影响,调试完参数后检测效果则比较稳定,有助于分析缺陷。
成像精度:自动扫查器机械运动部分为闭环系统,探头移动时不易发生偏移,编码器也不会因为工件表面状况不好而发生打滑,而手动检测中探头极易偏离原来的运动轨迹,造成缺陷成像变形,影响对缺陷的分析定量。
综上,腐蚀超声相控阵检测自动化扫查装置相对手动扫查具有扫查速度快、定位精度高、检测效率高、成像可重复性强等优势,并且在机械结构和电气系统上的设计均采用模块化组件,有效降低了维护维修成本,并且在扫查装置的拓展性也有着显著的优势,因此具有广泛的应用前景。
猜你喜欢
电力安全技术(2023年7期)2023-08-28 08:00:24
设备管理与维修(2021年17期)2021-11-02 11:15:28
煤气与热力(2021年3期)2021-06-09 06:16:16
化工管理(2021年7期)2021-05-13 00:45:20
中国特种设备安全(2019年1期)2019-03-13 01:05:52
电子制作(2019年24期)2019-02-23 13:22:16
电子测试(2018年15期)2018-09-26 06:01:46
小学生导刊(2017年17期)2017-05-17 05:44:16
世界汽车(2016年8期)2016-09-28 12:09:43
世界汽车(2016年8期)2016-09-28 12:09:00