基于图像识别的定日镜振动误差检测*
2022-01-15 06:24:38闫克丁
计算机与数字工程 2021年12期
孙 楠 闫克丁
(1.上海晶电新能源有限公司 上海 201112)(2.西安工业大学电子信息工程学院 西安 710021)
1 引言
聚光太阳能热发电(Concentrated Solar Power,CSP)技术是将一定范围的太阳光汇聚至一个较小区域,通过储能介质将光能转化为热能,再通过汽轮机等热机将热能转化为电能[1~3]。目前CSP技术在全球范围已经得到了很广泛的商业化应用,国家能源局于2016年启动包括玉门某塔式5万千瓦光热发电项目在内的第一批20个光热发电示范项目建设[4]。
塔式太阳能热发电技术是CSP的一种主要技术,该技术通过控制数量庞大的两轴转动定日镜实现太阳光的汇聚,所以定日镜需要较高的指向精度(精确地转动)以保证太阳光的有效汇聚。
在室外环境下定日镜的实际控制运维过程中主要会受到由风引起的镜面振动情况[5~7]。镜面振动会造成定日镜镜面的反射法线出现晃动,使得接收面处的太阳光斑会出现晃动情况[8~9]。由于风对定日镜镜面的影响是随机的,目前检测定日镜受风振动影响的方法主要有三种:1)通过流体仿真软件计算[10~11];2)通过风洞对定日镜模型进行检测[12~13];3)通过在定日镜镜面布置风压传感器进行检测[14]。通过流体仿真软件能够计算定日镜镜面被风吹时的受力情况,但是受限于边界条件设置、定日镜模型建立、算力等情况,使得计算结果精确度不够,甚至会出现一些异常情况,所以流体仿真软件的计算结果通常只作为参考。通过风洞进行检测需要制作定日镜的等比例模型,虽然比较精确地反映定日镜在不同风速下的变形情况,但是由于等比例模型与实际定日镜在质量、材料刚性等方面存在差异,使得风洞检测的结果与实际结果也会存在一定差异。通过在定日镜镜面布置风压传感器进行检测虽然能够反馈定日镜镜面的实际受力变形情况,但是不能直接反映定日镜镜面反射法线的晃动情况,需要将变形情况进行转化计算,在计算过程中容易引入新的误差。
因此,本文通过安装在定日镜镜面上的图像采集器采集特定标志物的图像,然后基于图像识别结果直接反映镜面反射法线的晃动情况,并基于图像识别的统计结果建立定日镜的振动误差模型,为定日镜的控制运维策略制定提供有效的理论支持,以保证定日镜的指向精度,确保整个光热发电镜场的聚光效率和发电效率。
2 定日镜振动情况检测
2.1 系统设置
在定日镜四个角处的子镜中心处分别安装一台图像采集器,用于对准标志物。如图1(a)所示,圆圈处表示图像采集器的安装位置;图1(b)为试验现场图像,方块处为图像采集器的安装位置,右侧小图为图像采集器示意图。图像采集器使用25mm焦距镜头,通过千兆网线连接至计算机并由计算机控制拍照并存储图像,采集同时使用风速仪记录风速情况。
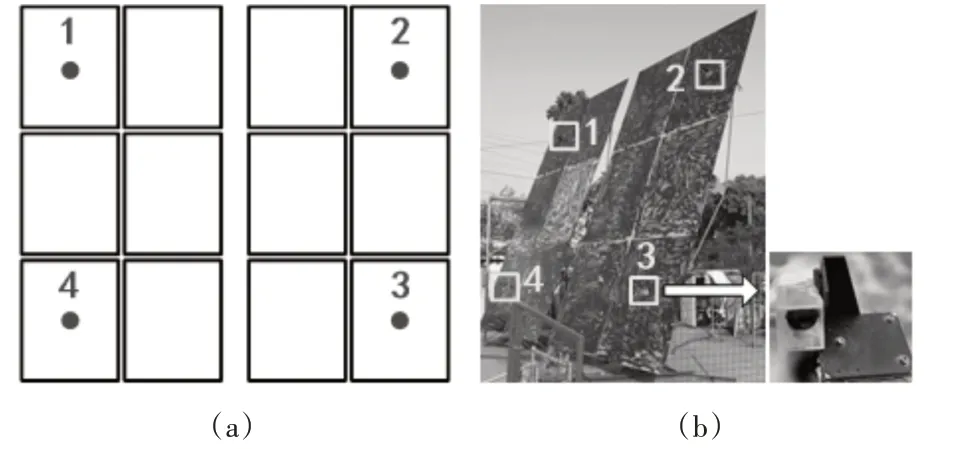
图1 图像采集器布置示意图
2.2 数据采集
当定日镜镜面与水平面平行时,定日镜的反射法线与水平面垂直,此时定日镜俯仰角为0°。选取两种定日镜俯仰角姿态,其中俯仰角30°为定日镜单日有效俯仰角转动范围的平均值,俯仰角70°为定日镜单日有效俯仰角转动范围的最大有效值。
如图2所示,以1号图像采集器采集的部分图像为例,单张图像中以左上角为原点,通过图像分割识别的方式获得标志物中心在图像中相对坐标[15],再将像素偏移量转换为偏差角用于描述定日镜振动误差的程度,转换公式如下所示:
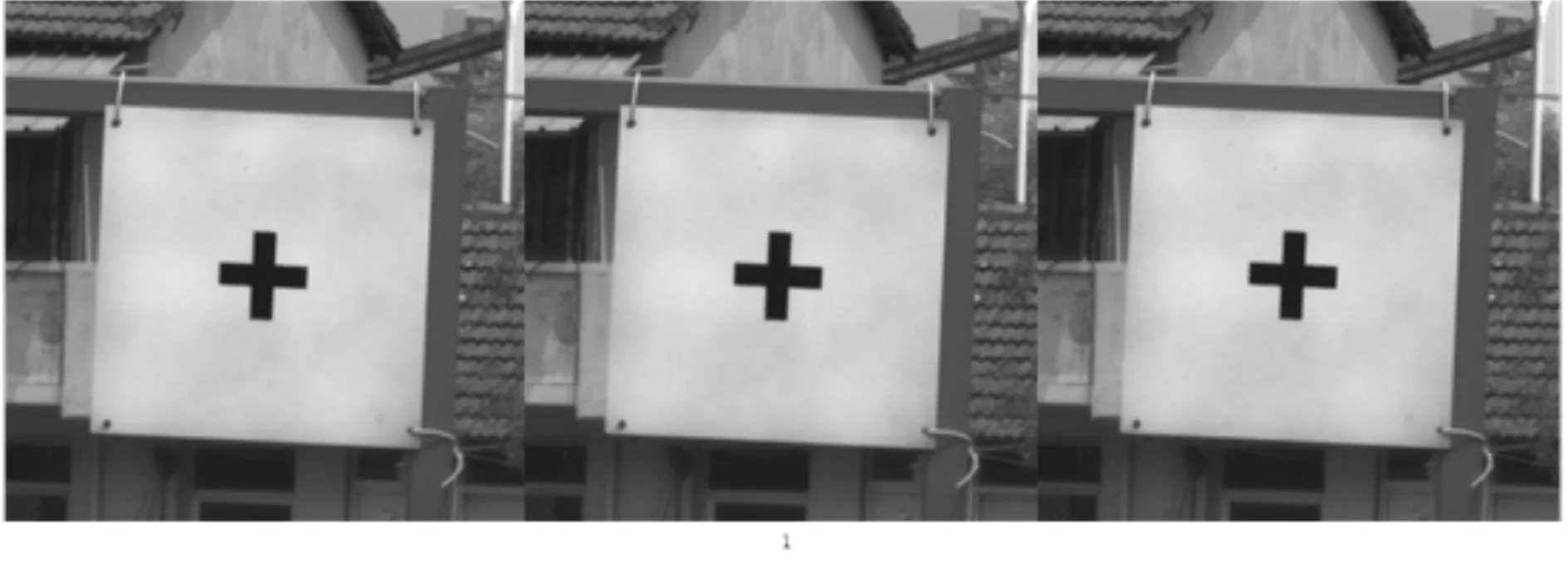
图2 1号图像采集器部分采集图像示意图
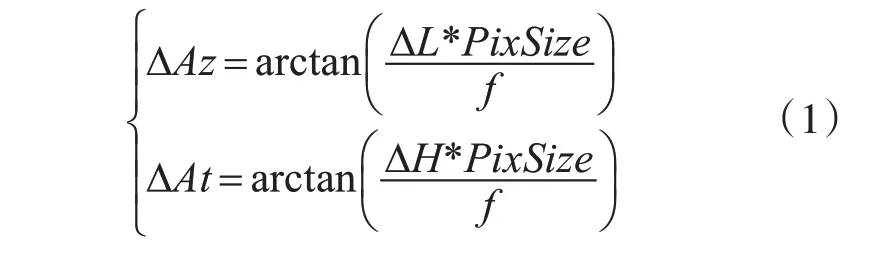
式中ΔAz表示绕方位轴偏差角(单位:弧度),ΔAt表示绕俯仰轴偏差角(单位:弧度),ΔL表示列方向偏差量(单位:像素),ΔH表示行方向偏差量(单位:像素),PixSize表示像元尺寸(单位:像素/m),f表示镜头焦距(单位:m)。
2.3 数据分析
2.3.1 检测姿态为俯仰角30°情况
如图3所示,俯仰角30°时有效风速范围可认为是0m/s~6m/s。俯仰角30°时基于方位轴偏差角结果,3#图像采集器对应有效结果的方位轴偏差角相对变化较大。基于俯仰轴偏差角结果,3#图像采集器对应有效结果的俯仰轴偏差角也相对变化较大。
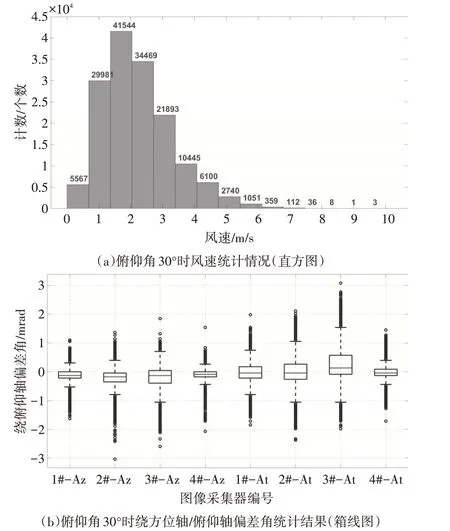
图3 俯仰角30°振动情况
2.3.2 检测姿态为俯仰角70°情况
如图4所示,俯仰角70°时有效风速范围也可认为是0m/s~6m/s。俯仰角70°时基于方位轴偏差角结果,1#图像采集器对应有效结果的方位轴偏差角相对变化最大。基于俯仰轴偏差角结果,4#图像采器对应有效结果的俯仰轴偏差角相对变化最大。
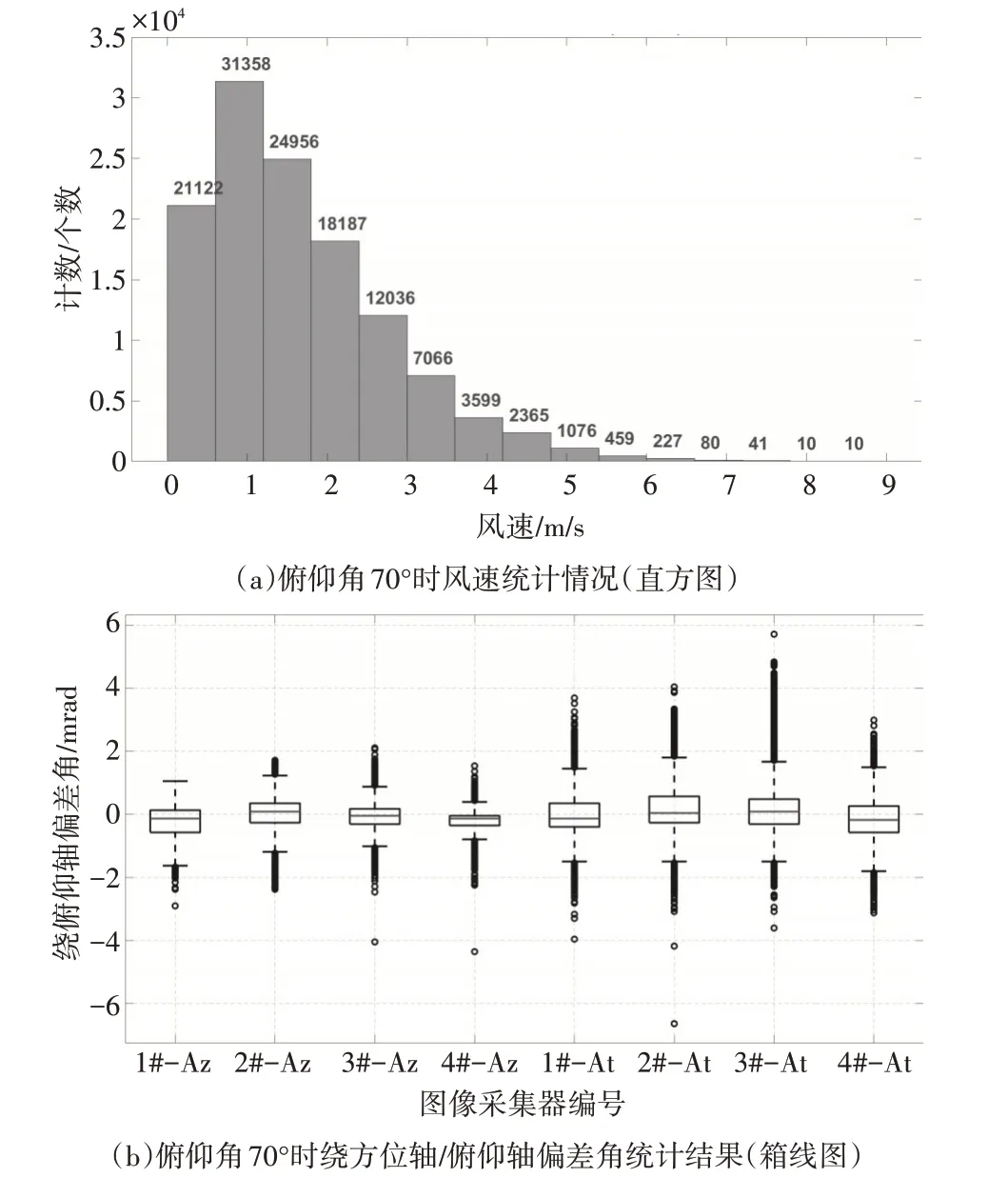
图4 俯仰角70°时风速统计情况
2.3.3 振动误差模型
单台定日镜可以将照射至其镜面上的太阳光反射至目标区域,而单面子镜的晃动会直接影响整台定日镜的一次反射精度,所以根据晃动程度相对最大子镜对应的图像采集器数据建立有效风速范围为0m/s~6m/s时的定日镜振动误差模型。
如图5所示,根据2.3.2节,1#图像采集器对应子镜绕方位轴晃动情况相对最大,数据拟合结果为N( -0.2693,0.464322);4#图像采集器对应子镜绕俯仰轴晃动情况相对最大,数据拟合结果为N( -0.16108,0.618752)。
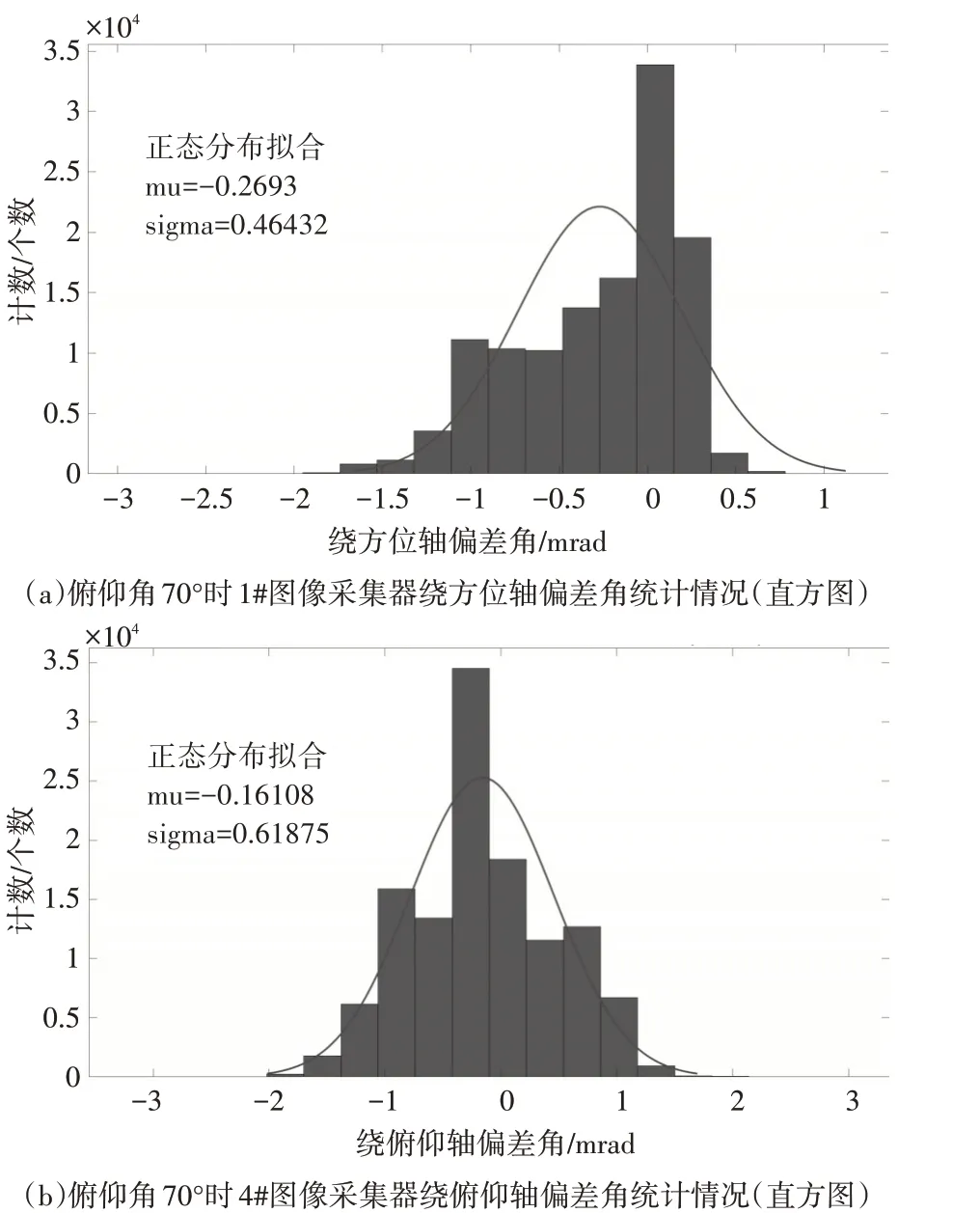
图5 俯仰角为70°时图像采集器方位轴偏差角统计直方示意图
以晃动程度相对最大作为建立定日镜振动误差模型的标准,均值影响偏差角的整体偏移情况,为了不失一般性,定日镜振动误差模型如下所示:

3 定日镜振动试验
3.1 环境及定日镜信息
在玉门某塔式5万千瓦光热发电项目中选取两台定日镜进行定日镜振动试验,项目地为甘肃省玉门市。试验用定日镜信息如表1所示,其中以镜场吸热器焦平面中心为原点,X轴为平行水平面指向正南方向,Y轴为平行水平面指向正东方向,Z轴为垂直水平面指向天空。

表1 试验用定日镜信息
3.2 试验系统设置
塔式太阳能热发电技术中定日镜通常使用标定白板评估定日镜的指向精度[16]。如图6所示,试验系统包括标定白板、图像采集器、风速仪和核心单元。标定白板为安装在高处的漫反射接收面,用于接收定日镜反射的太阳光;图像采集器的视场能够覆盖整个标定白板,用于采集标定白板处的光斑图像;风速仪用于采集试验地的风速信息,并将风速信息保存至核心单元;核心单元负责光斑图像数据分析和风速数据记录。
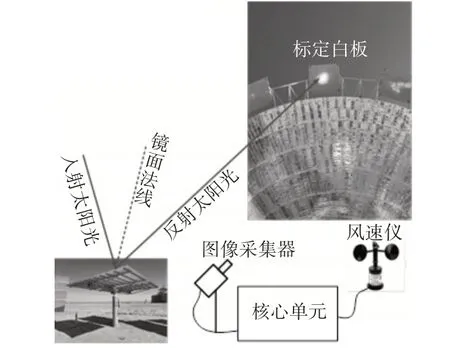
图6 试验系统示意图
3.3 仿真实验
根据如表1所示试验用定日镜中心坐标和对应的标定白板中心坐标,引入如式所示振动误差模型生成随机误差,两台试验用定日镜仿真光斑中心偏差统计结果如图7所示。
3.4 现场试验
为了验证振动误差模型的准确性,在玉门某塔式5万千瓦光热发电项目中两台试验用定日镜按照图7布置试验系统。试验风速结果如图8所示,主要集中在0m/s~6m/s,与仿真实验风速条件相似。
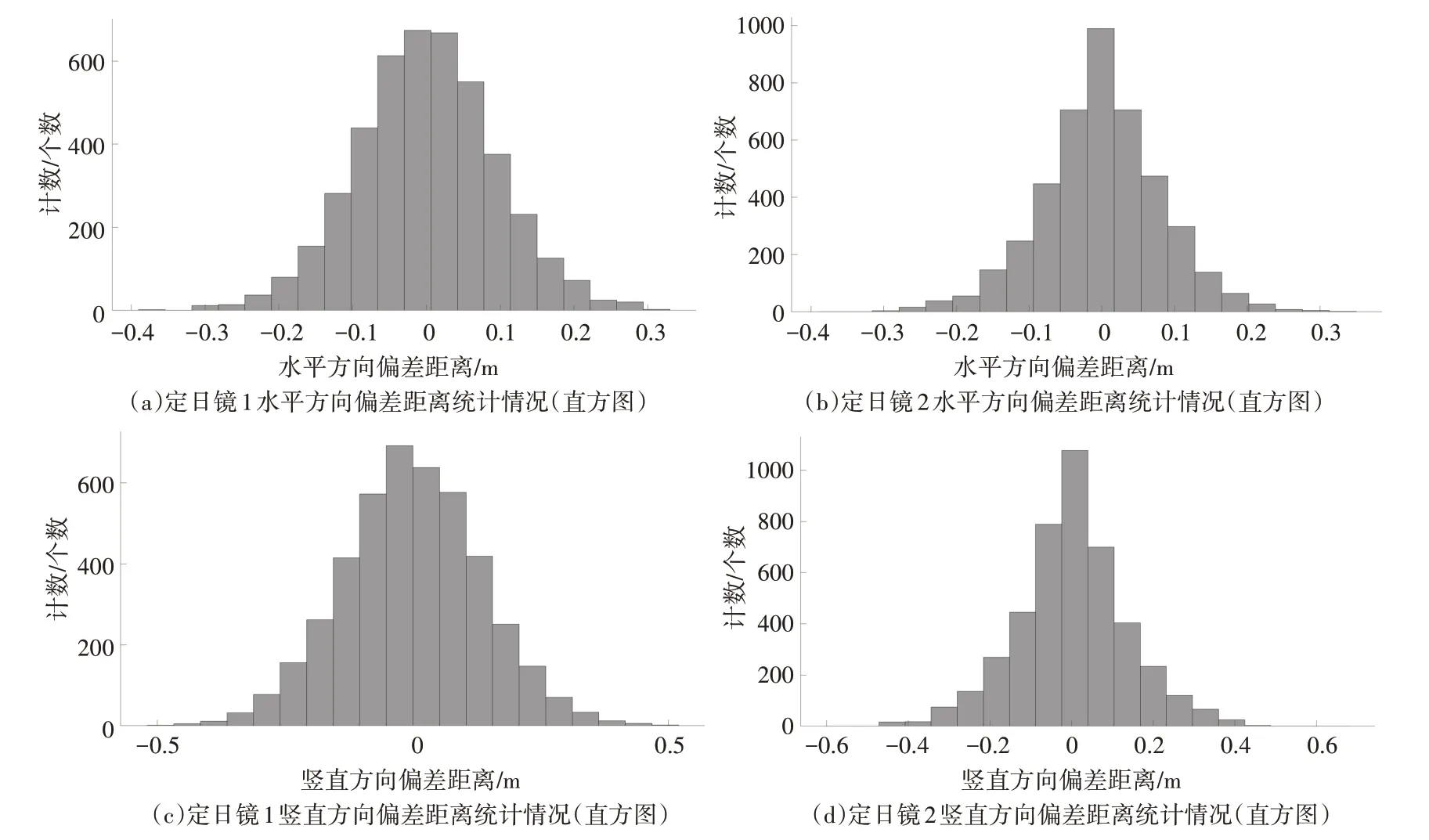
图7 仿真光斑中心偏差统计结果(直方图)
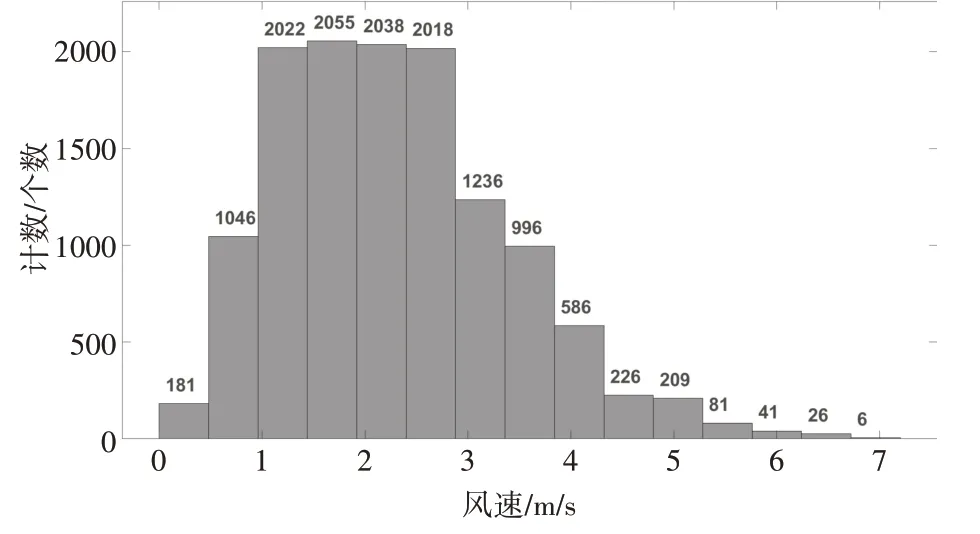
图8 现场试验风速统计结果示意图
如图9所示,蓝色直方图表示现场试验数据统计结果,橙色直方图表示仿真数据统计结果。对比正态分布拟合现场试验数据和仿真实验数据中的标准差,在基于水平方向偏差距离的统计结果中,仿真数据正态分布拟合结果的标准差sigma值为0.094283m,与现场测试数据数值差距较小;在基于竖直方向偏差距离的统计结果中,仿真数据正态分布拟合结果的标准差sigma值为0.13489m,与现场测试数据的数值十分接近。根据图9所示,在不考虑均值的情况下,定日镜1现场试验结果与仿真结果十分接近。
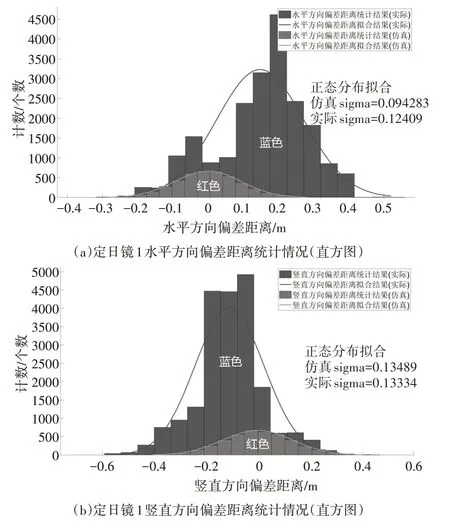
图9 定日镜1试验结果示意图
如图10所示,在基于定日镜2水平方向偏差距离的统计结果中,仿真数据正态分布拟合结果的标准差sigma值为0.082124m,与现场测试数据的数值十分接近;在竖直方向偏差距离的统计结果中,仿真数据正态分布拟合结果的标准差sigma值为0.13482m,与现场测试数值差距较小。根据图10所示,在不考虑均值的情况下,定日镜2现场试验结果与仿真结果十分接近。
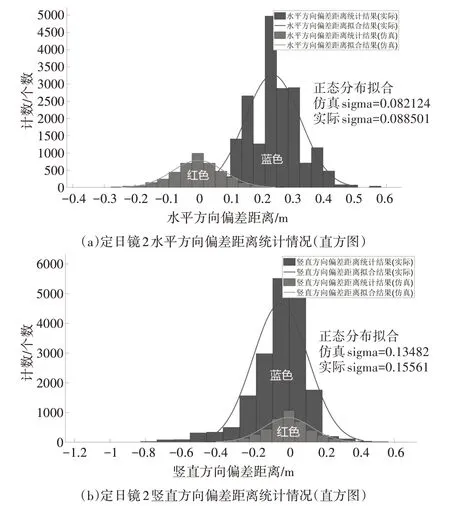
图10 定日镜2和定日镜3试验结果示意图
4 结语
综上所述,本文通过图像识别特定标志的方法检测定日镜的振动误差,通过对采集的一系列图像进行分析识别,将振动误差分解为绕方位轴偏差角(由图像列方向偏差量转化)和绕俯仰轴偏差角(由图像行方向偏差量转化)分别进行分析,并依据分析结果建立对应的振动误差模型,包括绕方位轴偏差振动误差模型和绕俯仰轴振动误差模型。基于振动误差模型对玉门某塔式5万千瓦光热发电项目中两台试验用定日镜进行仿真计算,获得反射至对应标定白板上的仿真太阳光斑中心分布情况,然后与现场实际采集的太阳光斑中心分布情况进行对比。对比结果表明,在不考虑正态分布拟合结果中均值的情况下,仿真结果的标志差数值与实际试验结果的标准差数值十分接近,即基于图像的定日镜振动误差模型能够准确地描述实际的定日镜镜面反射法线的振动情况,为光热发电镜场中定日镜的控制运维策略制定提供了有效的理论支持,确保整个光热发电镜场的聚光效率和发电效率。
猜你喜欢
现代仪器与医疗(2021年1期)2021-06-09 05:53:54
电机与控制应用(2021年12期)2021-02-28 07:55:52
海洋通报(2020年5期)2021-01-14 09:26:54
沈阳工程学院学报(自然科学版)(2020年3期)2020-08-27 10:36:40
沈阳工程学院学报(自然科学版)(2017年3期)2017-08-07 09:29:14
计算机测量与控制(2017年6期)2017-07-01 16:24:05
计算机测量与控制(2017年6期)2017-07-01 16:24:04
能源研究与信息(2016年4期)2017-03-31 04:17:45
西南交通大学学报(2016年4期)2016-06-15 20:29:37
沈阳工程学院学报(自然科学版)(2016年4期)2016-02-06 11:59:58