
基于PLC的老旧小区电梯控制系统设计*
2022-01-14 05:40陈丽娜马凡琳
机械研究与应用 2021年6期
陈丽娜,马凡琳
(国网平凉供电公司,甘肃 平凉 744000)
0 引 言
随着我国人口寿命的增长,生育意愿的不断降低,我国已经进入老龄化社会。在一些老旧社区,往往采用的是步梯设计,大量的老人上下楼十分不便。对老旧矮层楼房进行改造,安装电梯是必然趋势[1]。
在我国的传统电梯技术中,主要采用继电器控制[2]。线路非常有可能出现开路、短路的电路故障,而且维修和保养非常困难。汪丽群等[3]将电梯运输能力与乘客需求状态结合起来,提出一种基于PLC的电梯并联控制优化设计。曾新红等[4]运用PLC控制器和WINCC组态软件,设计了六部十层电梯仿真控制系统。陈鹏飞[5]基于西门子S7-1500、WINCC组态软件和TIA Portal15.1博图软件,针对多部多层电梯实现集群控制功能。使用PLC控制的电梯灵活程度高、稳定性好,变更功能时只需要更改梯形图语句,不需要重新连接电气线路。因此,进行基于PLC的电梯控制系统设计具有重要的现实意义[6]。
此次研究详细分析了电梯的整体结构及其控制逻辑,根据控制逻辑绘制出了逻辑流程图。随后分析了电梯的安全策略需求,设计了电梯控制系统方案,给出了基于PLC电梯控制系统整体设计方案,并运用组态王软件建立了电梯实际运行时的画面,最终实现了电梯的平稳安全运行。
1 电梯控制系统方案设计
电梯结构及工作原理如图1所示,电梯控制系统的结构有井道、引导轮、轿厢、曳引电动机、上下限位行程保护开关和平层传感器。上下限位行程保护开关是为了防止曳引电动机超过额定动作区域继续工作。一层作为电梯轿厢的基站,当触发检修信号后,电梯轿厢返回基站。各种传感器根据自身工作特性,发挥监控和传输信号的作用,控制曳引电动机和门电机启停[7-8]。
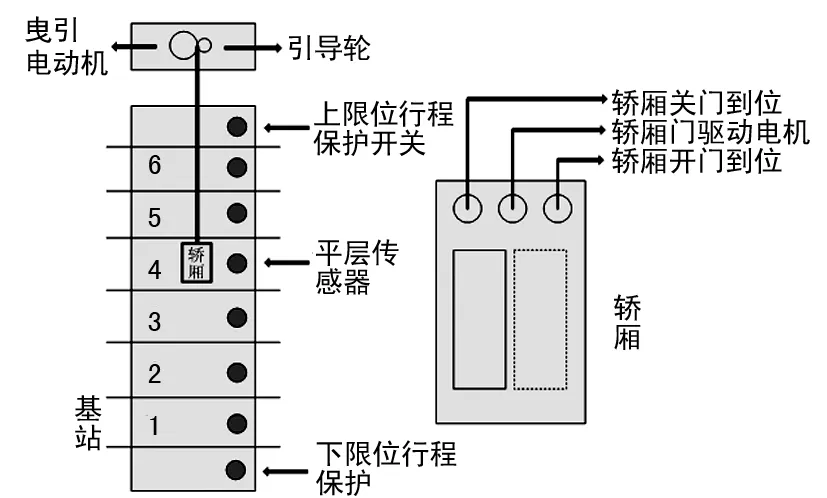
图1 电梯结构及工作原理图
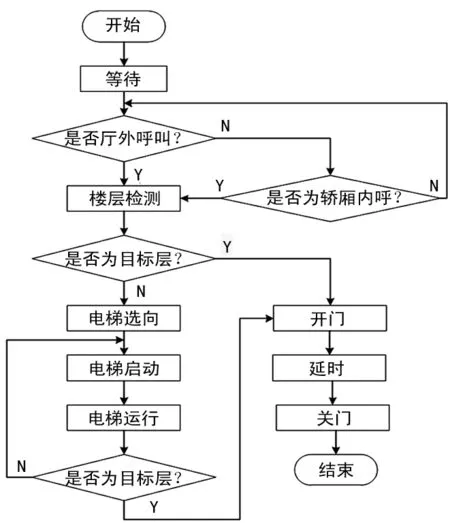
图2 电梯控制流程图
2 基于PLC电梯控制系统的软硬件设计
2.1 PLC选型
采用德国西门子公司研发的STEP-7作为编程软件,采用西门子公司的S7-200系列PLC作为控制器[9-10]。
根据输入、输出的数字量来分配I/O点数。根据控制要求,电梯控制系统共使用了33个数字输入量和30个数字输出量。选用CPU226为基本单元,其自身的输入点有24个,输出点有16个。电梯的输入信号不是连续的,所以选用数字量扩展单元模块,型号为EM223,输入点和输出点数均为16。电梯控制共计40路输入量,32路输出量,输出类型选择晶体管输出。
在系统通讯中,PC机将控制程序传入PLC中,PLC收到控制程序,内部经过编译,变为内部存储器的状态;PLC将自己的状态送到PC机中,PC机收集到重要信息,进行实时的监控。
2.2 电梯硬件选择
(1) 电梯开关门限位开关 开关门限位开关属于自锁类型的开关。开门限位开关的类型为行程结束型,触点类型为常闭,无信号时闭合,有信号时断开。关门限位开关的类型为撞击型,一般安装在电梯轿厢的门框边缘处,只有轿厢的两扇门接触,轻微撞击,关门限位开关才会产生信号。
(2) 电梯平层感应器 电梯平层感应器采用永磁感应开关,永磁平层感应开关运行稳定,结构简单,电梯安装人员容易操作。当轿厢靠近永磁开关,其内部的弹簧片通过磁力吸合,内部电路被导通,将轿厢平层信号传给PLC。轿厢离开永磁平层感应开关,磁力消失,弹簧片通过弹力被弹开,电路断开,输入信号消失。
2.3 电梯电路硬件设计
(1) 主电路设计 在此设计中,电梯的主要服务对象为老人,所以电梯定义为低速电梯(4 m/s)。在计算电梯曳引电动机功率时,考虑的因素有承载重量、电梯的速度等[11]。
图3为曳引电动机的主回路,电感和电阻为串入电动机定子回路的一部分。
推荐理由:渔村少年的成长史,一家四代的航海梦,童年风景与国家命运的时代交响。此番张之路先生打通科学思维与文学想象,讲述了一个太阳和阴凉儿捉迷藏的故事。故事文本的表层情节生动活泼、充满童趣,还包含了有关太阳的科学常识;故事的内核意义丰富:大与小、动与静、显与隐、能与不能等哲学概念深蕴其中。新锐绘本画家乌猫用极富个性的图画语言为这个故事赋能,以中国艺术解读中国文本,以东方美术诠释中国故事。最终,乌猫呈现给读者的是融汇了敦煌壁画元素的瑰丽画面,深具东方韵味,令人叹为观止。
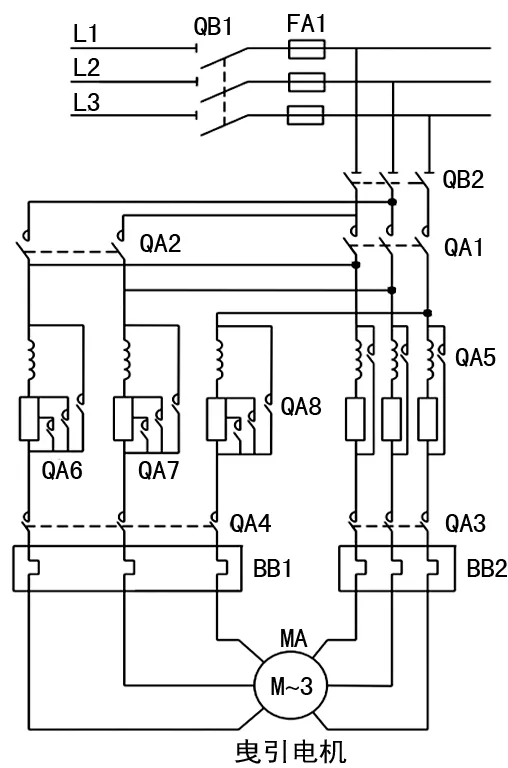
图3 曳引电动机主回路
曳引电动机由外部380 V,电压频率为50 Hz的三相交流电源L1、L2、L3三根相线供电使用。QB1为总电源的开关,作用是控制整套电梯设备电源的通断。交流接触器的主触点QA1负责曳引电动机的正转,QA2负责反转;QA3为电梯的高速运行接触器,QA4为低速制动运行接触器。当曳引电动机开始正反转的时候,QA1与QA2任选其一与QA3闭合,曳引电动机开始平稳加速,经过通电延时继电器的作用,QA5闭合,电阻和电感被短路,电动机开始高速运行。若PLC发出停车信号,QA3断开,QA4闭合,曳引电动机开始减速制动;在通电延时器的影响下,QA6-QA8依次闭合与断开,轿厢进入一、二、三级制动,实现平稳停车。
M2是门电机。DC模块分别与一根火线和一根零线相连,二者为相电压,经DC模块后,转为24V的直流电压供门电机使用。门电机控制轿厢门的打开与关闭。QA9为开门交流接触器的主触点,QA10为关门接触器,QA11为关门制动接触器。FA为熔断器,当门电机发生短路故障时,电流将会异常大,熔断器中的保险丝将会快速融化,将电路切断。BB3为热继电器,对24V门电机实行过载保护。热继电器可避免电机长时间超负荷运行。门电动机主回路见图4。
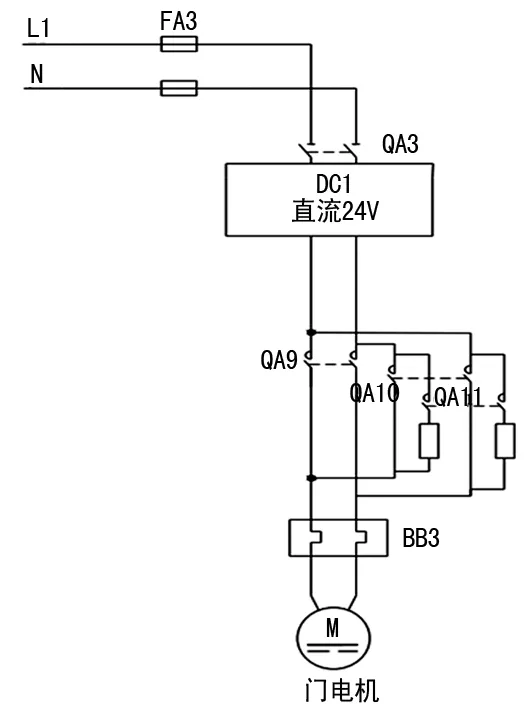
图4 门电动机主回路
(2) 控制回路设计 曳引电动机控制回路如图5所示。TC为控制变压器,可将两根火线间380V的线电压转变为220V的交流电压。BB1与BB2是热继电器的辅助常闭触点,当曳引电动机长时间超负荷运行后,热继电器动作,常闭触点得到电信号后断开,使控制回路失效。若PLC的输出点Q2.6发出指令,中间继电器的常开触点KF1得到电信号后,产生动作常开触点闭合,交流接触器的KF1、KF3线圈有信号,在主回路中主触点KF1、KF3闭合。通电延时器的线圈KF6开始延时0.5 s,经过延时后常开触点KF6闭合,线圈QA5得到信号,主触点闭合,电梯的速度加快。曳引电动机反方向转动与正转的控制回路相似,常开主触点QA1断开QA2闭合,通过改变电动机任意两相的相序实现反转。电动机正反转的控制回路采用互锁的设计,使其二者在任意时刻都不可能同时导通。PLC的输出点Q3.0发出停车靠站指令,中间继电器常开触点KF3闭合,交流接触器QA4、QA6的线圈得电,在主回路中闭合,电动机开始进入一级制动阶段。常闭触点KF3断开,在主回路中常开触点QA5与QA3断开,电动机加速过程结束。通电延时器的线圈KF7开始延时0.6 s,经过延时后,常闭辅助触点QA7断开使得交流接触器的主触点QA6断开,常开触点KF7闭合使得交流接触器的主触点QA7闭合,电动机进入二级制动阶段。同理,经过0.6 s后曳引电机进入三级制动阶段,当三级制动结束后,电动机停止工作,抱闸停车,轿厢实现制动停层。
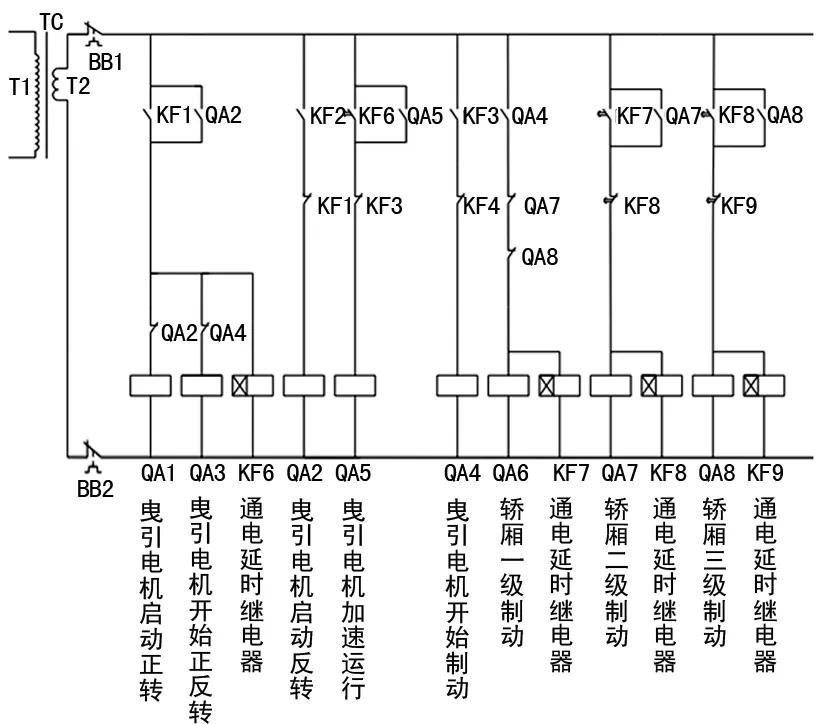
图5 曳引电动机控制回路
门电机的控制回路与曳引电机类似。通过通电延时器的作用,轿厢门即将关闭时切换控制回路进行制动,以定子回路串入电阻的方式实现定子调压调速。门电机控制回路如图6所示。
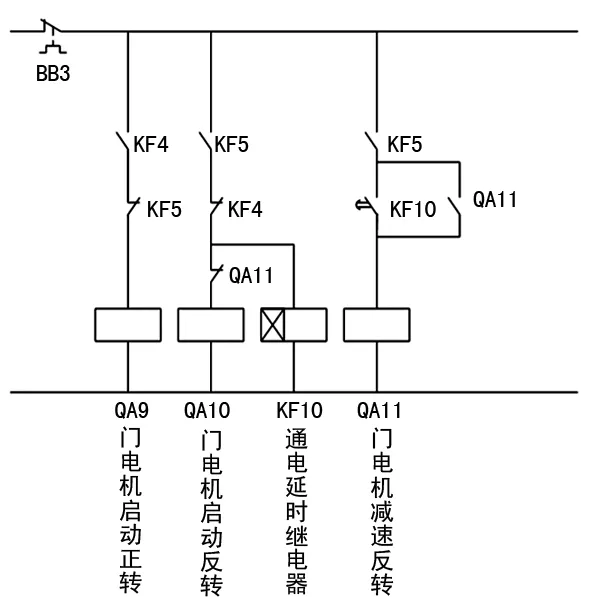
图6 门电机控制回路
2.4 轿厢门的控制程序设计
完整的轿厢门控制系统包括轿厢内门、轿厢外门、24V直流门电机、开关门限位开关,夹人检测传感器等。
(1) 开门程序设计 轿厢门的开启时间以及打开程度都有极高的标准。当轿厢的顶部触碰到楼层的平层限位开关,平层限位开关将信号传到PLC中,PLC判断该层是否具备停车条件。若具备停车条件,则曳引电机的主回路切换到制动部分,轿厢进入一级制动环节。通过时间继电器的延时作用,轿厢进入二、三级制动。当三级制动结束后,曳引电动机抱闸停车,轿厢停靠在外厅门处,门电机工作,轿厢打开。PLC执行完任务后,轿厢停靠在某层,电梯运行指令消除,进入休眠模式。若该楼层外厅有上、下行请求指令,PLC立即响应信号,轿厢开门。
(2) 关门程序设计 轿厢门在关闭时夹到人或轿厢过载等问题都会导致电梯关门中断[12]。若无意外情况且乘梯人员进入电梯后无操作,PLC内部的定时器T38计够5 s后自动关门。正常情况下,若在关门期间按动轿厢内开门按钮,门电机应该立即响应,从反转变为正转;轿厢处于完全打开的状态时,按动关门按钮,门电机响应反转,轿厢关门。
2.5 内呼及外呼指令应用设计
(1) 内选指令设计 轿厢内选指令流程如图7所示。轿厢内部触发信号,按钮对应的指示灯点亮。PLC中获得输入信号并判断,控制曳引电动机正反转。当轿厢到达指定楼层时,对应楼层的限位开关动作,指示灯熄灭,轿厢靠站停车。
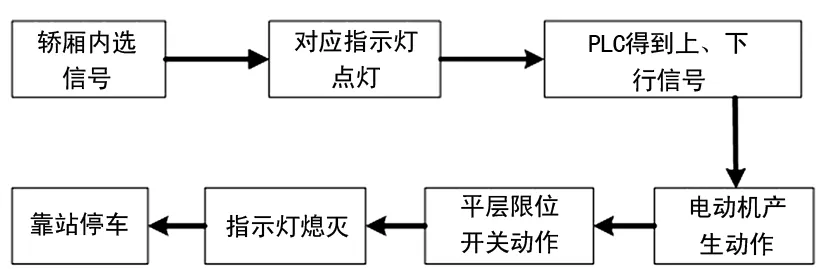
图7 内选指令流程图
(2) 外选指令设计 在电梯的控制系统中,外呼请求是电梯系统运行的开始。若曳引电动机正在正方向转动,电梯的轿厢向上行驶时,轿厢上方的楼层有乘梯人员按动上行按钮,触发上行信号,外厅的上行指示灯点亮,PLC中收到上呼指令并存储。待轿厢行驶至该楼层靠站停车,PLC将会清除该楼层的上呼指令,对应的上行指示灯熄灭。乘客进梯后,继续上行,直到行驶至内外选指令的最高层。假如上行指令在轿厢的下方,即使外厅的上行指示灯点亮,曳引电动机也不会立即响应停止正转。PLC中将会记忆该信号,电梯执行完此次上行任务后,曳引电动机反方向转动,返回该楼层,重新执行上行任务。下呼指令与上呼指令的设计原理相同。
2.6 电梯集选程序设计
在一套完善的电梯系统中,轿厢定向运行设计不可或缺。轿厢正常运行时,定向运动的方向是根据外厅的上下呼信号以及轿内的楼层按键来确定的。控制系统一旦确定方向,则反方向的请求信号将会暂时被忽略。轿厢在上下行的过程中,经过没有内呼及上下呼信号的楼层时,电梯不会靠层停车。电梯靠层停车时,相应楼层信号灯熄灭。
2.7 电梯停层靠站设计
轿厢在行驶的过程中,停车指令要远远优先于其他指令。在轿厢的停车过程中,需要经历三个不同程度的制动。轿厢触发目标楼层的限位开关后,限位开关作为输入设备,将数字量信号传递给逻辑控制器,输出设备是中间继电器。交流曳引电动机通过定子调压调速的方法实现转速的缓慢下降,最后交流接触器的触点断开,电动机停止工作[13]。
2.8 程序仿真
利用仿真软件对程序进行调试,可以实时的观察到各个I/O端口及位存储器变量的变化情况。不仅利于调试修改程序,而且免去了PC机与PLC接线的麻烦。将STEP-7编程软件中的程序以AWL文件格式导入到仿真软件中。设置完成后,程序仿真界面如图8所示。
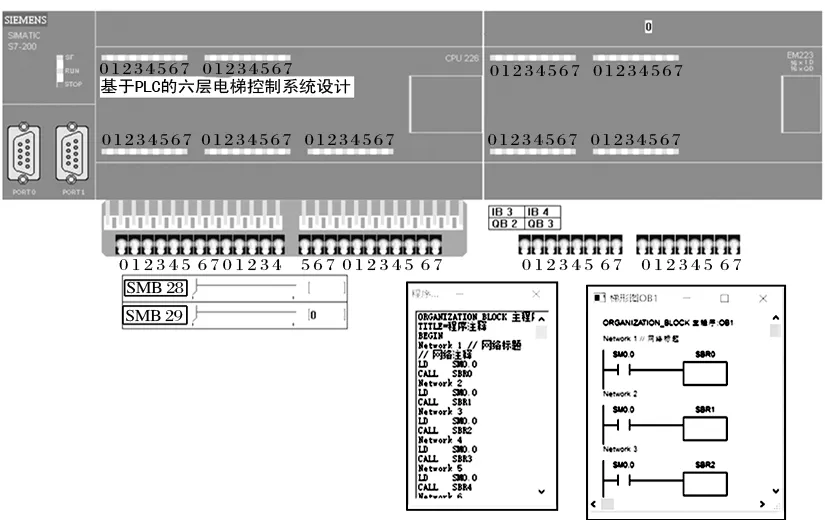
图8 程序仿真界面
3 组态软件设计
根据梯形图及设计需求, 采用组态王软件进行上位机界面的设计[14-15],绘制的六层电梯模拟仿真界面如图9所示。
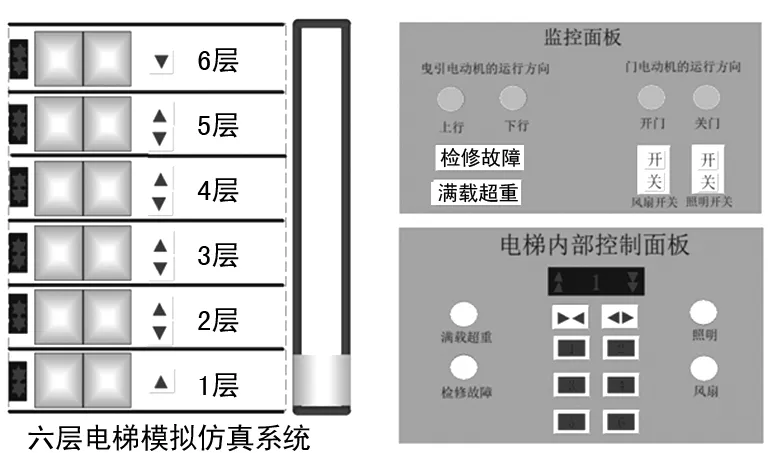
图9 六层电梯模拟仿真界面
建立好组态界面后,需要在数据库中的数据词典进行变量定义。根据组态界面中对象的需求来进行变量的具体设置。在此工程中,建立的所有变量类型分为两大类:内存整型、I/O离散型。表1为部分内存整型变量,表2为I/O离散变量。
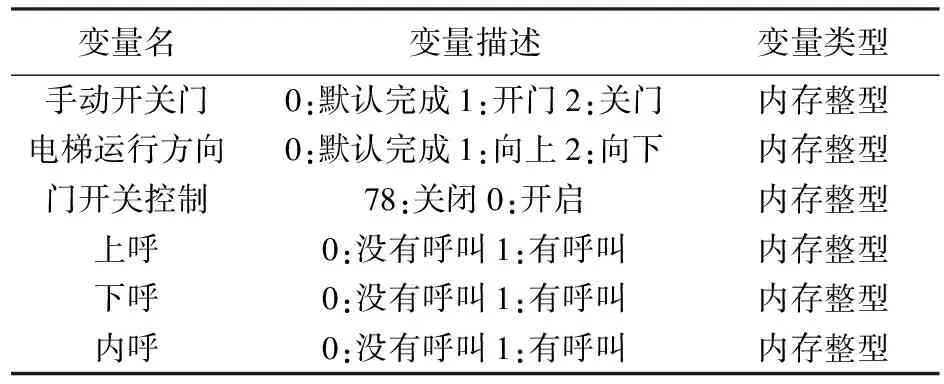
表1 内存整型变量
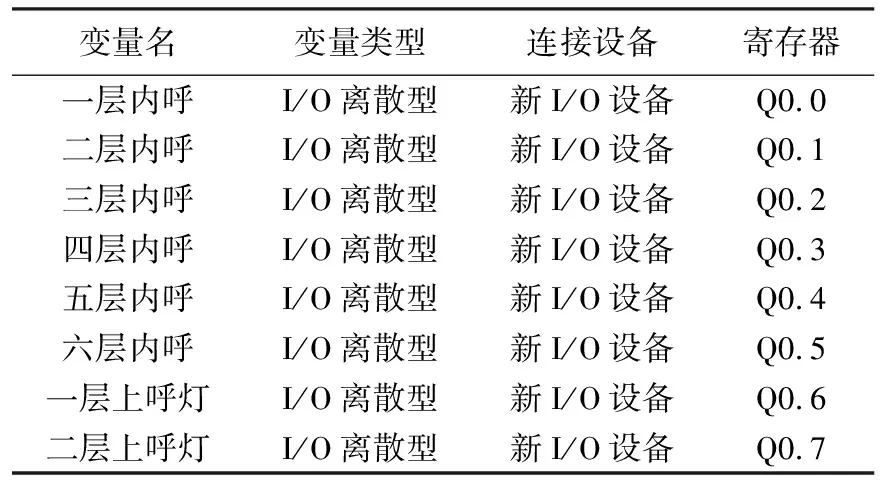
表2 I/O离散型变量
定义好所有变量后,需要进行动画的连接。在组态王的开发界面内,画面是静止的。将组态界面中的各种元素与变量相关联,方可使画面动起来。基于PLC的电梯控制系统实际调试画面如图10所示。

图10 电梯控制系统实际调试图
4 结 语
研究分析了电梯的结构和工作原理,提出了电梯控制系统方案。设计了门电机和曳引电动机的主回路、控制回路。使用STEP-7软件对电梯系统进行编程,实现了开关门控制、内外呼控制以及三级制动控制功能。运用组态王软件,建立了电梯控制系统界面,并模拟其实际运行时的场景,实现了电梯平稳安全运行。
猜你喜欢
中国特种设备安全(2019年11期)2020-01-16
中国特种设备安全(2019年4期)2019-05-20
电子制作(2019年7期)2019-04-25
中国特种设备安全(2019年2期)2019-04-22
中国特种设备安全(2018年12期)2018-03-15
质量技术监督研究(2017年4期)2017-05-07
中国质量监管(2016年10期)2016-07-10
现代工业经济和信息化(2016年7期)2016-05-17
工业设计(2016年5期)2016-05-04
电测与仪表(2014年15期)2014-04-04
