
中国非开挖水平定向钻进装备与技术研究应用进展
2022-01-14 06:45:50孙平贺刘伟胜杨涵涵韦帮第夏余宏烨
工程科学学报 2022年1期
孙平贺,刘伟胜,杨涵涵,韦帮第,夏余宏烨
中南大学地球科学与信息物理学院,长沙 410083
非开挖工程(Trenchless engineering)是利用微开挖或不开挖技术对地下生命线工程进行敷设、修复或更换的一门科学,亦是地下工程的“微创”科学.水平定向钻进作为非开挖工程学中的重要技术之一,自20世纪70年代初在美国加州帕哈罗河敷设燃气管道(长度180 m,直径100 mm)应用以来,广泛应用于给排水、电力、燃气、通信、油气等地下生命线工程中[1],近些年水平定向钻进(Horizontal directional drilling, HDD)技术在长距离山体水平勘察中也得到应用.
中国自20世纪90年代引入HDD技术以来,因其对环境干扰小、社会成本低、工程效率高等优点[2],在既有地下生命线探测与信息化、HDD装备、受限条件下关键技术、行业标准规范等方面取得大量研究成果和工程应用.中国过去25 a HDD钻机年增长情况[3],表明这一技术在中国仍呈现日益扩展的趋势,其在解决地下生命线工程的同时,面对复杂地质体环境,亟待解决的科学问题也不断凸显.
1 HDD 装备技术
非开挖水平定向钻进装备主要由钻机、钻具、钻头、泥浆循环设备和附属设备组成.HDD钻机的基本功能是实现导向给进、回转和扩孔回拉、回转及待敷设生命线的长距离回拉,同时为轨迹的角度调整提供载体.钻具主要包括钻杆、螺杆钻具、分动器等,实现力和扭矩的有效传递.钻头包括导向钻头和扩孔钻头,根据地层特征一般采用硬质合金、PDC等形式.泥浆循环设备包括泥浆泵、固控设备、管路、泥浆罐等,实现HDD钻进过程中的排屑、润滑、护壁等功能[4].
1.1 HDD 钻机
国内HDD 自主研发起步较晚[5−6],20世纪90年代中期先后研发了回拖力在50 t以下的系列钻机,这类整机性能较差,适应范围小,且钻机自动化程度不高.尽管采用了液压控制技术,但主要以电机作为动力源,无法满足野外作业需要,且功能较少.2000年之后[7−8],国内先后研发了大吨位钻机,并采用了全负载敏感控制技术,橡胶履带行走底盘,柴油机作为动力源,可根据实际工程需要采用集成和分体2种方式进行组装,钻机的自动化程度有所提高,也改变了200 t级以上的钻机依赖进口的局面.目前世界上回拖力最大是中国设计制造的2000 t分体式电驱动HDD钻机[9],钻机由动力站、动力头、给进机构、夹持器、钻架、地锚、操纵台、机械手和泥浆泵等部分组成,如图1.采用与电网连接的电源系统取代柴油机做动力源,驱动钻机运行,可有效减少噪音和污染,也可减少化石能源的消耗,简化了机械传动结构,提高了传动效率,并且易于实现自动控制[10].
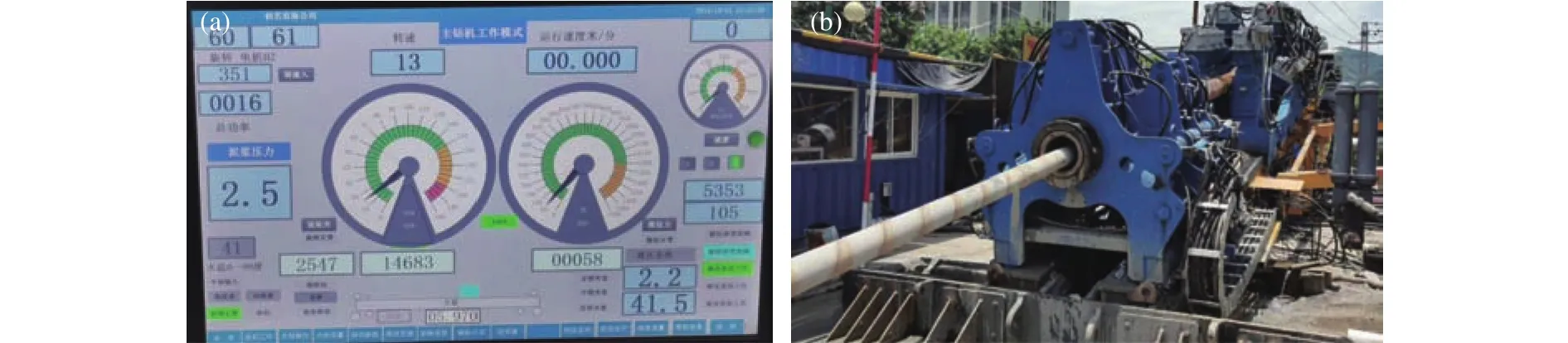
图1 世界上回拖力最大(20000 kN)HDD 钻机.(a)钻进参数界面;(b)HDD 钻机Fig.1 HDD drilling rig with the world’s largest drag force (20000 kN): (a) drilling parameter interface; (b) HDD rig
HDD钻机向大型化发展的同时,自动化、智能化、信息化也成为研究与应用的重点.工况参数检测平台依托LabVIEW虚拟仪器程序,通过USB数据采集卡、串口和6个传感器, 分别回转压力、给进力、泥浆压力、转速、钻速和泥浆流量进行动态测量,达到实时检测、实时显示、超限报警和数据保存与回放的功能[11].在此基础上,可编程序控制器(Programmable logic controller,PLC)智能控制技术可实现操作者在位保护、上下车功能互锁、逻辑功能互锁、防误操作保护等智能判断,根据参数判断结果保证HDD钻机在极限情况下能够自动停止并报警.通过在钻机安装无线接收控制器电路,并应用物联网技术可实现HDD钻机远程控制[12].无线操控器通过按钮开关输入开关量控制信号,通过球形旋钮模拟输入控制信号,由无线模块将模拟信号转换成对应的数字量信号.无线接收控制器收到开关量信号和数字量信号后,将数字信号还原成模拟信号,用开关量信号和模拟信号控制车载设备实现自动控制功能.基于Web的远程监控系统亦可实现远程控制,该系统由信息采集终端和服务器端软件组成,以8位单片机为主控芯片的信息采集终端对钻机运行参数进行采集,并实时发送、控制钻机.服务器端通过Java串口通信技术将接收到的钻机数据进行处理并存储至MySQL数据库,动态发布钻机参数,实现对HDD钻机的有效监控和系统性管理[13].
1.2 HDD 钻具
HDD钻具实际受力复杂,通过轨迹形式、钻具组合、力学参数和工艺参数,可分别建立导向、扩孔和回拖3种工况下钻具的力学分析模型,并可据此分析钻具的屈曲行为、弯曲失稳临界载荷等.针对极限情况下钻杆的失效情况数据统计分析结果,可建立钻具的静力学模型和动力学模型.依据疲劳寿命的理论与试验研究结果,可获取钻杆在拉伸、扭转和拉扭复合载荷下的疲劳寿命公式和断口微观形貌特征,揭示钻杆失效机理.扩孔钻具的运动姿态对轨迹影响较为明显,将扩孔钻具组合等效为质量均匀分布的刚体,且不考虑扩孔钻具组合的偏心及内外阻尼的影响,可采用转子—轴承系统动力学理论推导扩孔钻具组合三维小挠度运动微分方程,模型可有效模拟扩孔钻具的运动状态[14].
在理论和实验分析的基础上,将多个电动机分为两组进行动力集成,两组电机同时旋转反向驱动一级传动模块和二级传动模块,带动两级钻头同时反向旋转钻进,并通过调节转速和钻压实现扭矩平衡扩孔,可有效避免堵卡钻、钻杆断脱等工程问题.针对长距离HDD中螺杆钻具扭矩不足的问题,设计研发了大扭矩组合螺杆钻具[15].该钻具由公共分流接头、独立螺杆钻具、润滑系统、捆绑式扶正器、组合传动系统和油密封传动轴系统组成.各个螺杆钻具并联布设,通过四边形机构实现扭矩合成和运动传递.
钻具在地下空间位置信息获取通常采用以地球磁场方向为基准的磁通门磁强计和以地球重力方向为基准的摆式倾角传感器来进行,在外界电磁影响下,这种方法精度不高.采用3轴微加速度计和3轴磁阻传感器作为姿态敏感器件,实时获取定向钻进中钻具的方位角、倾角和面向角信息,可有效克服传统钻具探测的不足.该系统具有体积小、成本低、可靠性高等一系列优点,非常适合浅层地下定向钻进测量[16].
1.3 HDD 推管机
推管机主要应用在长距离HDD工程中,是一种生命线助力设备,如图2.工程中一般采用夹持装置固定管线,借助推进油缸或机械力使被固定的管线沿着回拖方向轴线运动.推管机一般安装在入土点,具有助力稳定、速度可控、推力大等优点,保障生命线回拉顺利完成.
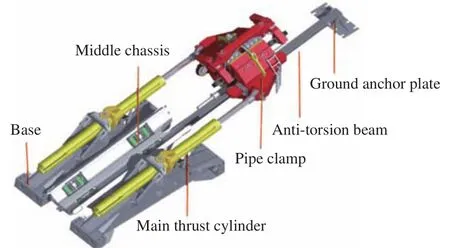
图2 推管机结构Fig.2 Structure of the pipe pusher
推管机的推力一般由推拉油缸提供,通过抱紧管道的4个夹片进行力的传递,夹片夹紧与释放通过夹片底部的夹持油缸实现[17].为避免夹片和钢管涂层之间的接触面被夹持损坏,在其与管道接触面硫化10~12 mm橡胶涂层,该厚度可补偿钢管的焊道及管道补口导致的受力不均衡.同时该橡胶涂层开槽用于排水及排渣,保障提供足够的摩擦力.当油缸承受缩缸负载时,推管机处于推模式;当油缸承受伸缸负载时,推管机则处于拉模式工作状态[18].
2 HDD 技术
2.1 电磁感应法探测技术
电磁感应法利用探测目标生命线同周围地层介质之间的电性差异和磁性差异,采用交流电进行激发,通过分析感应电流产生的二次磁场及其分布规律,进而确定生命线空间位置.这种方法一般只能探测金属类生命线工程[19].
针对非开挖管线埋深较深引起电磁信号弱的特点[20],通过对感应电磁场进行数理研究和技术模拟,总结出从1~21 m不等深度、电流状况下,磁场强度分量Hx、垂直分量Hz及强度分量变量∆Hx磁场的归一化电磁异常的曲线分布特征规律.针对特深生命线电磁信号衰减问题[21],可采用频域电磁法与声波法相结合的方式,根据交流磁场信号、声波振幅、频率、连续性、波形和反射形态的相对变化情况,有效识别深埋空间位置.
同时,外界环境对电磁信号影响也较为明显,主要涉及生命线工程中的电流强度和管道电流引起的电磁异常,它的信噪比与信号和噪声有关.有效提高待测生命线中的电流强度,使观测到的异常具有足够置信度,是提高检测精度的途径之一[22].在各种干扰源中,地下并联载流生命线间的干扰最为常见,干扰程度也最为强烈.特别是平行生命线间距小于1倍埋深时,采用传统的单根管线特征点难以有效获取管线深度,可利用正演拟合曲线精准确定埋深.对于近距离多条生命线并行探测[23],可依据完整磁场特征参数,通过单线圈接收的磁场水平分量数据反演分析,构建生命线地下空间分布模型.瞬变电磁法(TEM)具有低阻敏感特性,是浅部生命线探测常用方法之一,为了充分利用该方法水平分量信息,近些年又提出了动态瞬变电磁法(DNT),将TEM发射接收线圈缩小到几平方米甚至更小,形成集成探头体,能够有效利用三分量信息,实现浅部生命线工程的动态精准探查[24].
2.2 地下生命线工程的信息化
由于地下管线多头管理现象严重,造成了地下管线档案分散式管理的状况;部分地区尚未实现地下管线档案向城建档案部门的完整移交,已归档档案也无法进行共享.美国“811”一呼通体系是2005年由联邦通信委员会授权设立的N-11系列编号之一,其目的是为开挖施工提供作业区域内地下管线信息,以保证施工过程安全.近些年国内借鉴美国811“一呼通”系统,初步完成了地下生命线工程的信息化构架.
构建了地下生命线信息管理及共享平台,包括数据加载、数据编辑、数据输出、三维管线场景管理、城市数据安全管理等功能组成[25].按照软件运行功能等不同将其分为系统层、基础层、数据层和中间层4类[26].系统层主要包含了数据管理、维护、更新等功能,是平台主要工作界面与工具;基础层主要用于满足软件平台实际运行的必要环境,如软硬件配置、网络环境、安全监控系统等;数据层存储了城市地下管线信息基础数据、综合处理数据、更新数据、各类生命线数据库等;中间层在架构中有承上启下的作用,主要功能为场景浏览、信息查询、空间分析及数据共享等[27−28].
针对传统AutoCAD设计时,多种生命线在同一位置高程变化后的角度及空间无法二维模拟的问题,采用建筑信息模型(Building information modeling,BIM)技术的信息模型集成数字化信息,仿真模拟地下生命线工程所具有的真实信息,实现全生命周期管理[29].针对地下生命线工程的三维建模[30],研究表明,高精度自动三维建模具有重要意义,其思路是利用二维普查数据,依据各类生命线点和线段的特点,采用不同方式,通过空间、属性和材质信息映射,实时驱动生成三维模型,如图3.其建模方法是针对形态规则且结构单一的管线段,通过二维管线段的定位、管径和材质信息映射,利用OpenGL实时绘制三维管线段.在此基础上,通过二维数据库更新信息的提取,主动在三维系统中进行单体生命线模型及其附属设施的重建,自动建模工具也会同步更新其拓扑关系,精细化地建立管段和拓扑连接关系驱动的管点三维实体模型,实现三维模型的局部高效更新.同时,融合GIS、物联网、大数据挖掘等技术,可极大提高地下生命线管理效率.

图3 基于建筑信息模型技术的三维模型.(a)城市地下管线三维模型;(b)武汉市城市地下管线综合信息平台[30]Fig.3 Three-dimensional model based on the building information modeling technology: (a) three-dimensional model of underground pipeline;(b) Wuhan city underground pipeline comprehensive information platform[30]
2.3 双向对穿 HDD 技术
为了解决长距离HDD导向钻压不足、钻进效率低的问题,国内于2006年首次应用双向对穿HDD技术完成2454.15 m的钱塘江底部地下生命线工程敷设.对穿技术采用主钻机+辅助钻机同步导向钻进,当辅助导向钻头进入对接区时,通过近钻头短节内的轴向磁铁,引导主钻导向钻头顶进.当主钻头接近轴向磁铁时,利用轴向磁铁产生的磁场测量两个导向孔圆周偏差,并动态调整钻头姿态使偏差缩小直至平缓进入辅助钻机导向孔,并在轴向磁铁引导下,沿着辅助导向孔推进直至到达辅助钻机的入土点,完成整个导向孔的对接[31].
双向对穿HDD技术的关键是近钻头人工磁场信号的传输与控制.依托泥浆螺杆马达带动磁钢旋转发出磁场信号,形成旋转磁场对导向曲线、探棒姿态、相对空间位置进行识别,其精确度可达厘米级[32].信号接收端的探棒可根据磁场信号对圆周偏差进行实时计算,从而实现双向对穿,其有效感应距离可达100 m.此外,综合运用双向对穿+推管技术,如图4,可有效解决在钻遇高硬塑性粉质黏土时的卡、抱钻及生命线回拖遇卡管等难题[33−34].

图4 双向对穿技术示意图.(a)电磁导向;(b)对接成功[34]Fig.4 Schematic of the two-way through technology: (a)electromagnetic guidance; (b) successful docking[34]
为了提高对接信号的精度,可采用地面磁信标、3σ准则(σ为标准差)和差分处理的组合方式.依靠地面放置的永磁体或直流螺线管作为磁信标,通过建立基于地面磁信标的参考坐标系和基于钻具的载体坐标系,利用捷联在钻具中的测量阵列测量地面磁信标的磁场分量和磁场梯度张量计算钻头的位置坐标,且具有较强的抗干扰能力[35].针对磁强计内在测量误差和外在环境误差,提出在钻进现场采用基于拟牛顿法(BFGS算法)总误差参数估计的磁强计误差补偿方法.为了减少外界磁场的干扰,采用加速度计和3轴磁阻传感器的测量值,实现对导向钻头倾角、方位角和工具面向角的测量.结合轴向磁铁和人工磁场,利用随钻测量单元获取其相对于轴向磁铁的磁场强度分量,实现两侧导向钻具的准确对接[36].
2.4 大口径 HDD 技术
大口径HDD工程施工难度大,存在回拖力不足,孔壁失稳和钻具失效等风险,对钻机能力、泥浆工艺和钻具强度提出了更高的要求.
针对回拖力不足,架空发送法与管沟发送法通过减小管道与地表面之间的摩擦系数,可有效减小回拖载荷.为进一步减少回拖阻力,根据泥浆黏度与泥浆配方、泥浆密度之间的对应关系推导管道回拖阶段泥浆泵量与回拖速率之间的函数关系式,并从润滑减阻的角度进行分析,合理设置泥浆工艺参数和管道回拖参数[37].
大口径管道受场地范围和预制长度的限制,往往也需要“二接一”和“多接一”拖管法,但其更易引起孔壁失稳问题,采用有限元差分算法和颗粒离散元法分析HDD钻进过程中孔壁应力分布规律,确定施工过程中不同时段的泥浆工艺参数,保证接管过程的孔壁稳定[38].
针对钻具失效问题,提出了公称外径1.2~2.5 m的大口径HDPE管道,在0.4~1.6 MPa不同公称压力下对应的公称壁厚,并建立了适用于超大口径HDPE输水管道水力坡降数据库[39].大口径管道回拖起吊过程中更易发生卡管与管道变形等问题,采用有限元仿真模型和起吊力学分析,提出了不同长度管道适用的入土角度和吊点间距建议值[40].
2.5 HDD 回拖力计算模型
HDD回拖力是指在生命线回拉阶段管线在钻孔内承受的各种阻力之和,一般是随着回拖进程不断增加.回拖力大小直接影响钻进设备的选取和生命线力学参数的校核,是HDD工程设计的关键参数之一,国内常用的计算模型有卸荷拱土压力估算法、净浮力计算法、油气钢管道穿越计算法、给排水管线计算法等[41].卸荷拱土压力估算法是假定生命线在回拖过程中同时受到钻孔上方塌落土的压力和孔底支承力的双重作用,管段本身的重量全部由孔底承担,忽略泥浆对管线的浮力作用.在钻遇到复杂地层中,如沙卵石层,由于地层内聚力较小,地层对管道的压力是无法忽略的[42].该模型的计算值一般小于实测值,在黏土、亚黏土、黄土、岩石层中较为适用.钻孔上方塌落土的压力可根据钻遇地层天然卸荷拱的高度进行计算.净浮力计算法忽略了生命线周向土体的作用,仅考虑了泥浆对管线的浮力作用和管线自重因素.油气钢管道穿越计算法在计算时仅考虑了管壁摩擦阻力和泥浆阻力,忽略了绞盘效应、弯曲效应和管线与地面的静摩擦力,在实际使用中可利用安全系数使计算值扩大1.5~3倍,该模型一般应用在以摩擦力为主的地层中.给排水管线计算法获取的计算值比实测值偏大,计算参数中考虑了HDD扩孔钻头的端面阻力,一般适用砂土层和黏土层.
随着生命线功用和类型的不断增加,其物理力学属性也发生较大变化,这对回拖力计算产生较大影响.基于管线弯曲对回拖力的影响,提出了适用于多管组合穿越的回拖力计算模型[43].该模型认为在管线曲率较大的情况下,可采用净浮力法对回拖力进行计算;在管线曲率半径较小、管线比重较大情况下,采用绞盘计算法计算回拖阻力.泥浆在生命线回拖过程中会形成一定的阻力,基于泥浆阻力的计算模型进一步细化了回拖力的大小[44].
2.6 地表变形与冒浆
HDD钻遇地层主要以黏土、粉土、砂层和淤泥质土等软弱层为主,土体压力小、体积质量低、孔隙大.在泥浆循环作用下形成多相多场条件,多相介质包含了土颗粒、泥浆中的高分子聚合物、自由移动水和盐离子等,具有复杂的多尺度结构.多场作用包括了应力场、渗流场和化学场等,宏观上表现出泥饼厚而疏松,即使在低泥浆压力工况下,孔内泥浆仍然易侵入周围软弱地层,导致地表变形或冒浆.采用ABAQUS有限元软件,结合工程实例,对不同孔径,不同铺设深度钻孔周围土体变形进行数值模拟,研究水平定向钻孔施工后孔洞附近的土体变形规律[45−46].针对钻遇松散地层、水敏地层、溶蚀地层、漏失地层等复杂地质体,可通过泥浆配方体系的调整实现防冒浆.通过对泥浆压力和钻遇地层相关力学、渗流的计算研究,设计开发了冒浆自动判别预警系统,如图5所示.系统依据输入的入土点、出土点的坐标及角度、深度、终孔直径等工艺参数、钻遇地层类型、重度、孔隙比、黏聚力、内摩擦角、塑性指数等地质体信息、勘察钻孔编号、直径、深度、各层编号及厚度、压力测试点编号、三维坐标值及泥浆流变参数,可自动生成钻孔内各测点的泥浆压力值,形成对比曲线.
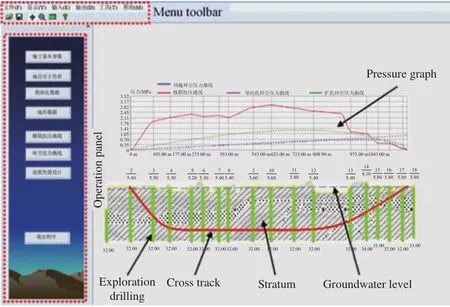
图5 地表变形监测系统Fig.5 Surface deformation monitoring system
针对地表变形的监测技术,非接触远程测量被认为是比较可靠的方法.研究表明,曲面扫描建模技术可利用多幅变形区域的图片信息,自动识别标识点并自行匹配,实现相对定向的自动化,提取变形点的几何信息,确定其空间位置.同时对图片表面纹理进行搜索,生成高密度三维点云.点云再经过进一步的去噪、平滑处理后,结合平面投影法对密集点云进行三角网格化计算处理,并将三角网格转换成面,从而获取变形区域的三维坐标.根据等效地层损失理论,采用源汇法则研究单位体积空隙引起的任意一点的总位移场与应力分布,并据此建立HDD施工中的地层位移模型,获取了上覆地层各方向位移积分公式,采用MATLAB软件求解积分的数值解,获得了钻杆长度L、钻孔轴线深度h、钻头半径R和地层损失GPA对HDD上覆地层变形的影响规律[47].
3 结论
本文结合中国HDD研究应用现状,对HDD装备技术、地下生命线工程的探测与信息化、双向对穿HDD技术、大口径HDD技术、HDD回拖力计算模型、地表变形与冒浆6个方面的进展做了分析研究.
(1)根据地下生命线的导电特性,电磁感应法被广泛用于既有生命线的三维空间探测.多种探测技术的融合、复杂干扰下的数据解析、精度提高的数学挖掘将是未来研究重点.
(2)参考美国811“一呼通”系统,大区域范围内完成地下生命线工程的信息化构架,是保障地下生命线安全运行,实现透明地下空间的关键途径.
(3)在已有20000 kN世界上最大回拖力钻机的基础上,应针对我国区域地质条件和城市布局,研发模块化、智能型、环保性的系列装备,并实现自主风险预判与应急处置的功能集成.
(4)结合实际工程特点,建立室内大比例模型,能够实现HDD导向、扩孔、回拖的全过程模拟,并针对各种风险工况,动态获取地层物性、设备参数、工艺参数等数据,建立室内分析方法和数据解析模式.
(5)大跨度山体HDD勘察和羽状分支取心技术研究将进一步拓展HDD的应用领域,实现地下工程的“靶向”精准识别.
猜你喜欢
江苏安全生产(2023年12期)2024-01-05 03:01:16
中老年保健(2022年5期)2022-08-24 02:34:44
铁道建筑技术(2021年4期)2021-07-21 05:33:36
安徽地质(2019年2期)2019-10-30 08:11:28
凿岩机械气动工具(2016年1期)2016-11-11 07:33:37
凿岩机械气动工具(2016年1期)2016-11-11 07:33:35
深空探测学报(2016年2期)2016-05-17 05:19:17
凿岩机械气动工具(2015年3期)2015-11-11 07:32:54
中国卫生(2015年7期)2015-11-08 11:09:52
吉林地质(2014年4期)2014-03-11 16:48:12
