
下肢康复机器人的训练控制与监测研究
2022-01-13 05:35高经纬
北京信息科技大学学报(自然科学版) 2021年6期
吴 达,马 超,2,高经纬,苏 鸿
(1.北京信息科技大学 现代测控技术教育部重点实验室,北京100192;2.北京信息科技大学 机电系统测控北京市重点实验室,北京 100192)
0 引言
现有的下肢康复机器人可根据使用者身体的具体需要进行简单的调节[1],在结构设计上更加符合人体运动规律和人体需求[2],为实现科学的康复训练奠定了基础[3]。将人机功能学设计、测试和监测技术,应用于康复训练设备的开发设计,可以使设备使用起来更加舒适、安全。现有的康复机器人及康复训练设备大多体积较大、价格昂贵、操作复杂[4]。能够解决临床特有问题、高性价比、具有监测采集能力及智能控制的下肢康复机器人成为研究的热点,具有很大的社会需求[5-6]。
本文对下肢康复机器人训练模式控制过程监测技术进行了研究,以期望实现训练过程的智能便携控制和训练过程的智能识别分析,为下肢康复机器人智能控制奠定基础。
1 系统结构及硬件设计
1.1 下肢康复机械结构
图1所示为本文开发的下肢康复机器人执行机构。根据膝关节术后的康复需求,设备实现了下肢的主动、被动训练功能。
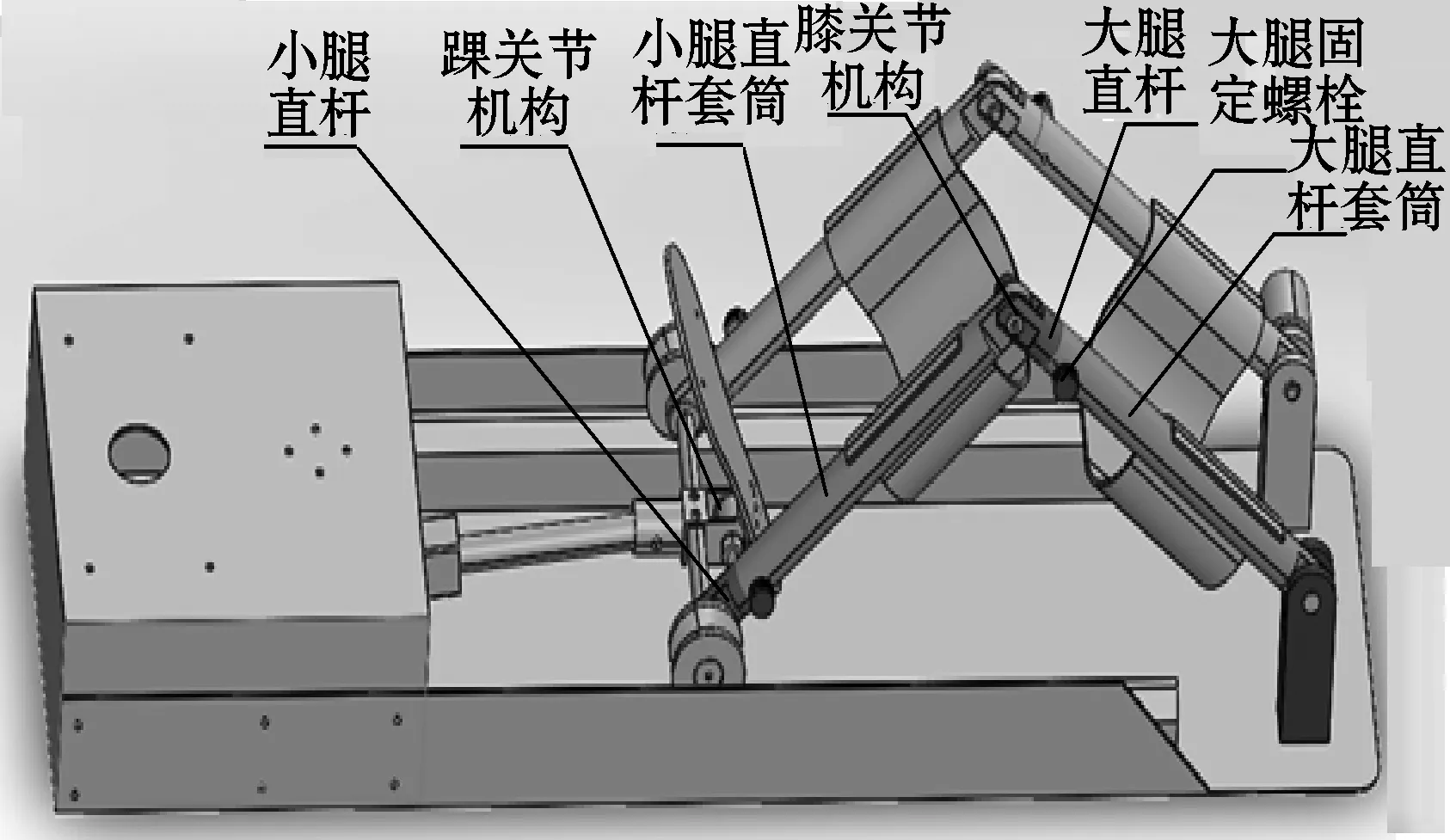
图1 下肢康复机器人执行机构
膝关节主要由股骨下端、胫骨上端和髌骨组成,正常人体膝关节运动的最大角度在70°左右。本文设计的下肢康复机器人机械结构通过使用旋转副来实现旋转运动。膝关节的运动范围如表1所示。
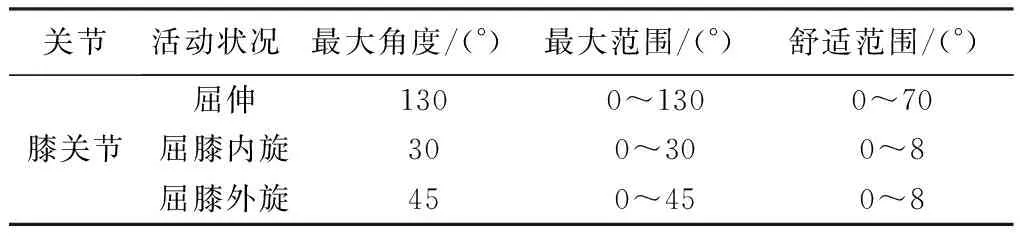
表1 膝关节运动范围
通过ADAMS软件对下肢康复机器人执行机构进行运动范围仿真,结果表明,其关节角度变化范围基本符合人体运动舒适性范围,系统结构基本符合康复学效果,能够帮助使用人员自动完成康复训练过程,如图2所示。

图2 ADAMS运动范围仿真
1.2 训练控制设计与实现
1.2.1 训练控制流程
在被动训练模式下,首先设置电机的目标速度,在训练时由使用者被动跟随训练。训练过程的强度可以调整。在完成一次康复训练之后,机器人停止动作,并且保存康复训练数据。在主动训练模式下,要求使用者主动发力,当使用者的下肢肌肉力量不足以达到预定目标时,由机器人辅助患者完成相应的训练。在完成一次康复训练之后,机器人停止动作,并且保存康复训练数据。控制流程如图3所示。

图3 下肢康复机器人控制流程
1.2.2 系统硬件机构
康复训练控制程序确定后,进行硬件部分的选型和设计。为了设备的正常工作,采用外围模块电路来满足设计要求。本系统的硬件控制系统结构如图4所示,包括单片机控制器部分、电源模块、数据通信模块、上位机工控主机、数据采集模块和执行模块。
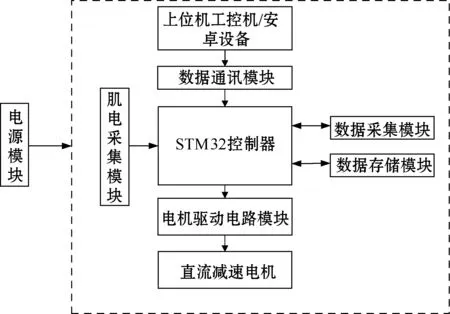
图4 控制系统结构
1.2.3 控制电路设计
针对训练控制流程的要求,设计电源、时钟、复位、信号采集、电机驱动、通信等电路。
选择以STM32为主控芯片,实现下肢康复机器人平稳精确的控制。复位电路主要实现系统重启,保持系统稳定。时钟电路能够产生精确的振荡电路,保证了系统工作的准确性。同时,系统还设计调试接口可以方便地对控制系统程序进行单步调试,方便康复机器人的控制与开发调试。利用RS-485串行总线通信,实现上位机与STM32控制器之间的信息交换。其驱动电路如图5所示,电机驱动芯片采用飞思卡尔半导体有限公司生产的MC33931芯片,具有控制电感负载的功能,其最大电流可达5 A,默认将使能引脚置为高电平,使用IN1、IN2、FB三个引脚控制电机的运动模式。具体控制模式如表2所示。
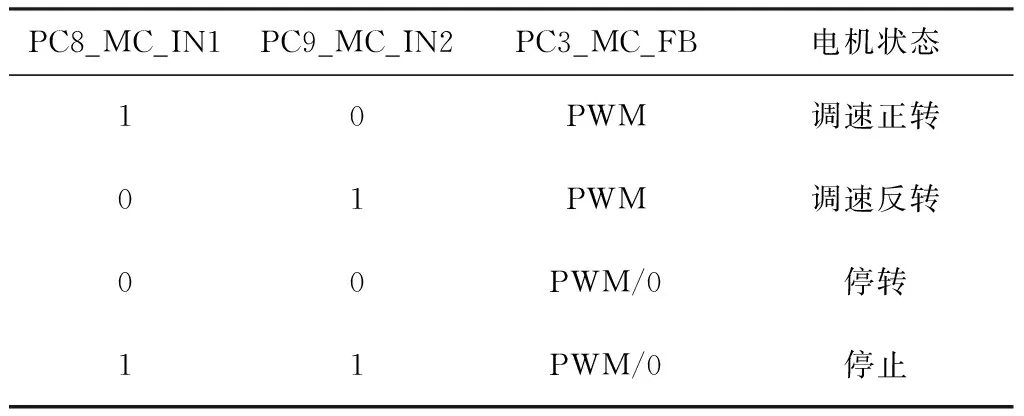
表2 电机控制逻辑
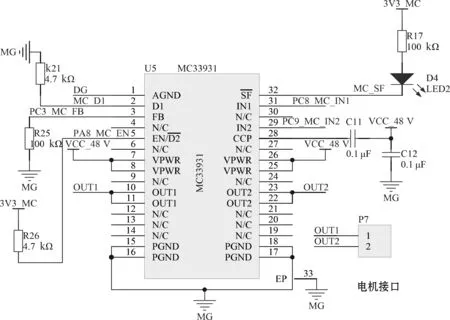
图5 电机驱动电路
1.2.4 无线通信电路设计
WIFI模块具有传输速度快、支持多人连接、通信距离远的优点,并且能支持网页和App配置,系统中选用了ESP-M1芯片,将该芯片的TXD引脚与STM32主控制器中的RX引脚进行连接,并将ESP-M1芯片的RXD引脚与STM32主控制器串口的TX引脚进行连接,并默认对ESP-M1芯片进行使能,由STM32主控制器的程序初始化决定模块的使用,芯片的NRST引脚采用3.3 V电压进行拉高,当引脚电平被拉低时,芯片进行复位,如图6所示。

图6 无线通信电路
2 基于Android的控制系统软件设计
在Android平台上开发的下肢康复机器人软件系统提高了系统的控制性和实用性。系统按照康复机器人的总体方案,实现了注册、训练模式选择与控制、监测数据管理等功能,操作界面简洁,提高了人机交互能力。
通过手机与控制板上的ESP-M1芯片进行socket连接,基于TCP/IP协议,可以通过安卓手机远程控制端发送请求命令,当控制器接收到手机发送给ESP-M1模块的信息后,发出动作指令,驱动电路控制康复机器人进行康复运动。
利用安卓控制平台,进行被动训练模式下下肢康复机器人的试验。通过设定关节训练速度,对设备的运行效果进行验证,通过手机界面可以看到训练参数、训练进度等。手机上的Android软件界面如图7所示。

图7 Android软件界面
使用采集卡采集编码器反馈的脉冲信号,采样频率为50 Hz,初步验证了系统运行的稳定性,如图8所示。
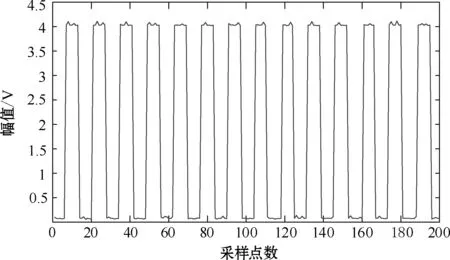
图8 被动训练下的编码器反馈
主动训练模式下,当患者发力不够时,康复机器人进行2 s的判断,当患者没有达到训练速度的时候,康复机器人辅助患者进行运动,以达到运动要求。验证效果如图9所示。

图9 主动训练下的编码器反馈
3 基于随机森林的训练过程识别分析
通过对多名平均年龄为25岁左右的受试者进行实验,将测得的原始肌电信号进行分析,并对惯性传感器(inertial measurement unit,IMU)信号采用4种不同的机器学习方法训练识别,采用机器学习算法对数据进行分析。对采集的表面肌电信号(surface electromyography,sEMG)数据和IMU数据进行预处理,处理掉数据缺失、分布不均衡以及数据异常的问题,然后将数据按照7∶3的比例划分为训练集和测试集,将其随机打乱,分别通过决策树、随机森林、MLP(多层感知器)神经网络、线性回归4种算法进行训练,进行训练速度识别。
对使用人员进行4种不同速度下的被动训练。某26岁健康男性在某速度下被动训练大腿股直肌的肌电信号如图10所示。
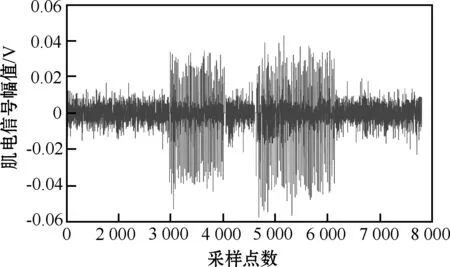
图10 大腿股直肌肌电信号
通过对一个训练周期下的肌电信号的特征值进行分析可知[7],中值频率(median frequency,MDF)、均值频率(mean frequency,MNF)、峰峰值(peak-to-peak value,PPV)可以较好地反应能量变化。从表3可以看出,在4种不同训练速度下,通过中值频率的向右偏移,肌肉群发力的情况不同,并呈现规律性,有助于医师进行康复训练效果的评定。

表3 不同速度状态下的sEMG信号特征值
图11为训练过程中的大腿IMU加速度变化曲线。由于下肢康复机器人的结构原因,IMU只能检测到Z轴的加速度,可以看出训练过程的加速度存在着多变非线性的特点。
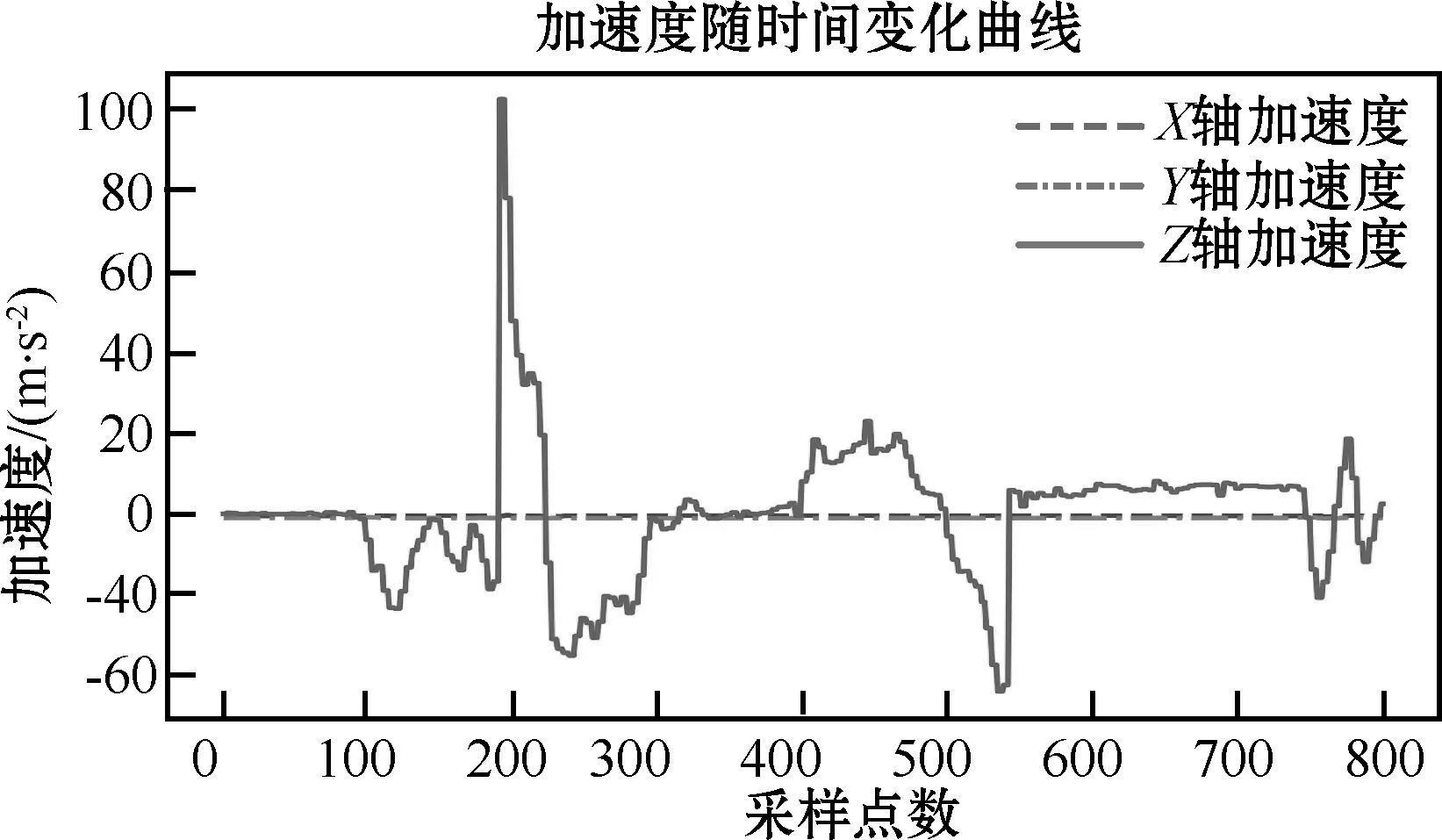
图11 大腿加速度变化曲线
如图12所示为基于随机森林算法对运动状态的识别效果的混淆矩阵,图13为线性回归算法对运动识别效果的混淆矩阵,可以看出随机森林算法识别效果更好。以随机森林算法混淆矩阵第一行为例,有7 316个数据被正确识别为速度A,只有1个数据被错误识别为速度B,相较于其他算法具有优越性。
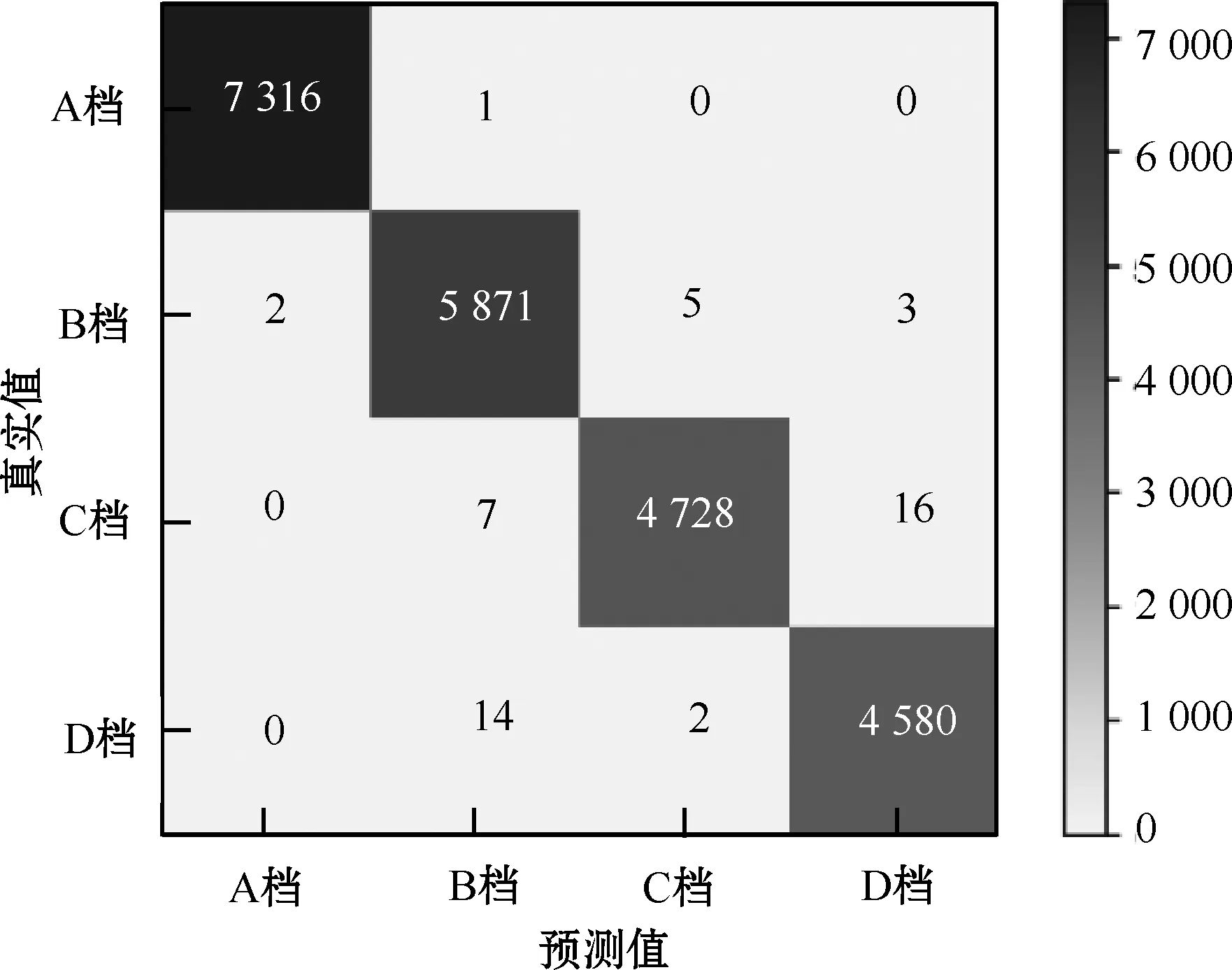
图12 基于随机森林算法的混淆矩阵
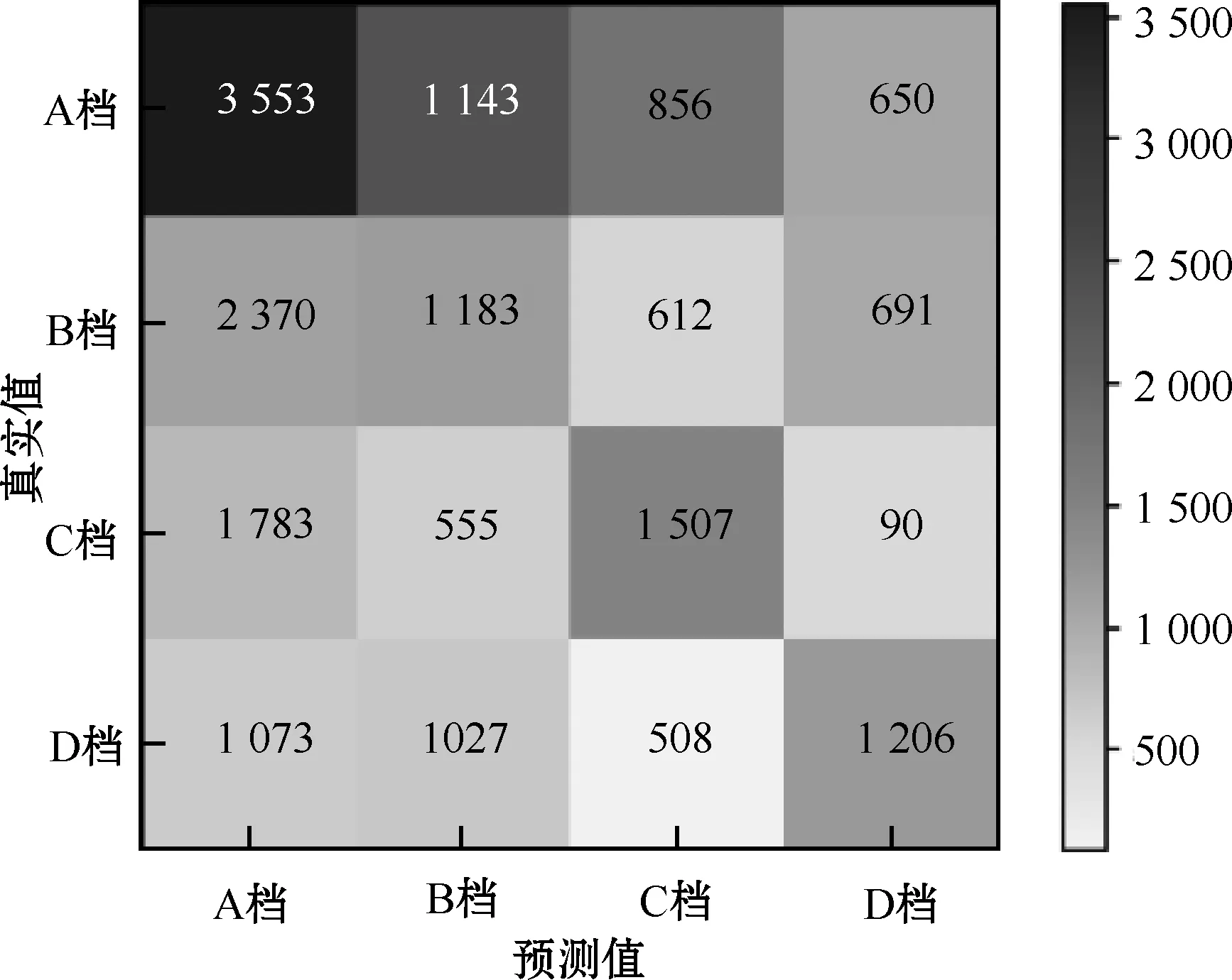
图13 基于线性回归算法的混淆矩阵
4 结束语
本文针对患者下肢术后的被动训练和主动训练,进行了下肢康复机器人训练控制与监测系统的硬件和软件设计。其中硬件设计以STM32F373RBT6主控制芯片为核心,软件系统基于Android平台开发,实现了注册、训练模式选择与控制、数据监测与管理等功能。同时通过对不同速度被动训练下的肌电信号的特征值分析,验证了不同速度下训练效果的差异。通过对IMU信号的识别分类,验证了随机森林算法在运动状态识别方面的优越性,为人机协同控制奠定基础。后续还需要将设计的下肢康复机器人及其控制监测系统应用于患者的实际康复过程,对患者的生理信号进行分析研究。
猜你喜欢
现代临床医学(2022年4期)2022-09-29
现代仪器与医疗(2022年2期)2022-08-11
健康护理(2022年3期)2022-05-26
中国典型病例大全(2022年11期)2022-05-13
中国典型病例大全(2022年13期)2022-05-10
现代仪器与医疗(2022年1期)2022-04-19
护理与康复(2022年3期)2022-03-25
中国听力语言康复科学杂志(2021年6期)2021-12-21
现代仪器与医疗(2021年4期)2021-11-05
现代仪器与医疗(2021年1期)2021-06-09
