
电力电子变流技术中的三相电压型PWM可控整流器研究
2022-01-10 08:08:46高有清
无线互联科技 2021年21期
崔 红,高有清
(1.辽宁省交通高等专科学校,辽宁 沈阳 110122;2.沈阳光大环保科技股份有限公司,辽宁 沈阳 110026)
0 引言
在工业领域的许多场合,需要变流器进行电能变换,如高速电机的功率变换系统。但传统的电能变换方式会对电网造成较大的谐波污染。将PWM技术应用到整流器中,能够达到减小谐波的目的。随着新型电力电子器件的开发,先进控制算法的应用,使PWM整流器的性能逐步提升。
1 三相电压型PWM可控整流器的电路结构
PWM可控整流器通常分为两类:电流型和电压型。与电流型PWM可控整流器相比,电压型PWM可控整流器具有结构简单、控制方便的特点。三相电压型PWM可控整流器电路结构如图1所示。
图1中,ua,ub,uc表示三相电网电压,ia,ib,ic表示三相输入电流,La,Lb,Lc表示交流侧滤波电感,RLa,RLb,RLc表示滤波电感的等效内阻,Cdc表示直流侧的滤波电容,VT1~VT6表示可控整流器的6个功率开关器件,R0表示负载电阻,EL表示直流电动势,id为母线侧电流,0表示电网的中性点,N表示下桥臂的节点。三相电压型PWM可控整流器拓扑结构具有输入交流侧谐波小、输出直流侧电压稳定的特点,适合在大功率的场合应用。

图1 三相电压型PWM可控整流器的电路结构
2 三相电压型PWM可控整流器的原理分析
根据三相电压型PWM可控整流器的电路结构,通过对功率开关器件VT1~VT6进行PWM控制,由于电感的存在,交流侧电流不能突变,能够使电流波形接近于正弦化[1]。而且,能够跟踪交流侧电压波形的变化,使功率因数接近于1。开关频率越高,电流波形越接近于正弦。通常用空间矢量描述整流桥的开关状态。每一相桥臂有两种开关模式,上桥臂导通、下桥臂关断用1表示,下桥臂导通、上桥臂关断用0表示。三相PWM整流器共有(000-111)8种工作状态,其中包括6种非零状态矢量(001-110)和2种零状态矢量(000)和(111)。
3 三相电压型PWM可控整流器的数学模型
为便于建立三相ABC静止坐标系下的数学模型,做以下假设:(1)电网电压三相平稳对称;(2)功率开关器件是理想开关,无开关损耗;(3)网侧电感是线性滤波电感;(4)直流侧负载由电阻和反电势串联等效。
开关函数分别定义为Sa,Sb,Sc,上、下桥臂的逻辑关系相反。上、下桥臂通断状态分别用1和0表示,上桥臂通为1,下桥臂通为0。


从式(6)可知,在三相ABC静止坐标系下,三相电流ia,ib,ic相互耦合,需要对ia,ib,ic进行解耦。为了有利于控制系统设计,可以将三相ABC静止坐标系通过坐标变换转换成同步旋转dq坐标系。
4 三相电压型PWM可控整流器控制器的设计
对于高速电机的功率变换系统,为了减小电流谐波对高速电机产生的影响,设计合理的PWM可控整流器控制器非常重要。
三相电压型PWM可控整流器控制器通常采用双闭环控制策略。电压外环可控制三相整流器的母线电压,电流内环可按照外环的电流指令控制电流,实现高功率因数的电流控制。电压电流双闭环控制结构如图2所示。

图2 电压电流双闭环控制结构
5 系统仿真
基于Matlab/Simulink仿真平台搭建了三相电压型PWM可控整流器系统的仿真模型[2]。仿真参数为:输入电压(线电压)为380V,输入电压频率f=200 Hz,输出直流电压U= 600 V,直流母线电容C=2 200 μF,滤波电感L=5 mH,串联 5 Ω电阻,采样频率为10 kHz,直流电源电压为300 V。三相电压型PWM可控整流器直流侧输出电压波形如图3所示。网侧相电压和相电流波形如图4所示。
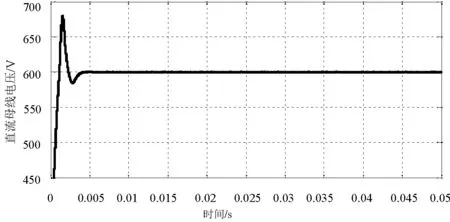
图3 整流时直流母线电压波形

图4 相电压和相电流波形
由仿真结果可知,整流器直流侧的母线电压在经过小幅度的超调后稳定在设定值,网侧相电流和相电压的相位基本相同,网侧功率因数接近于1。表明三相PWM可控整流器的谐波抑制能力很强。
6 结语
对于高速电机功率变换系统,研究了三相电压型PWM可控整流器的电路结构、工作原理、数学模型以及三相电压型PWM可控整流器控制器的设计,对三相电压型PWM可控整流器系统进行了仿真研究[3]。仿真结果说明,整流器输出侧的直流电压稳定,网侧相电流的相位能够较好地跟随相电压的相位,采用三相电压型PWM可控整流器具有很强的谐波抑制能力,能够提高系统的控制精度。
猜你喜欢
防爆电机(2023年6期)2023-11-30 03:05:28
新型工业化(2021年8期)2021-10-23 10:27:10
电子与封装(2021年7期)2021-07-29 10:58:48
科学家(2021年24期)2021-04-25 17:55:12
哈尔滨铁道科技(2020年4期)2020-07-22 02:22:28
通信电源技术(2016年4期)2016-04-04 02:57:16
电源技术(2015年1期)2015-08-22 11:16:26
电源技术(2015年12期)2015-08-21 08:58:44
电测与仪表(2015年12期)2015-04-09 11:44:44
电测与仪表(2014年21期)2014-04-04 12:32:08
