
视觉传感技术在深基坑坑周土体沉降监测中的应用研究
2022-01-09 08:55凌壮志
地基处理 2021年6期
凌壮志,刘 贺,王 旭
(1. 杭州地方铁路开发有限公司,浙江 杭州 310007;2. 中铁十局集团第三建设有限公司,安徽 合肥 250101;3. 浙江大学 建筑工程学院,浙江 杭州 310058)
0 引 言
随着我国城镇化进程的加快,地下综合体、地下综合管廊、地下轨道交通、超高层建筑等基础工程建设项目日益增多,基坑工程的规模不断扩大,带来一系列新的技术问题和挑战[1]。我国幅员辽阔,地质情况多样,在城市中开展工程建设又面临着周围环境复杂问题,开挖风险较高,且基坑开挖引起的环境效应问题在城市地下工程建设中备受关注。软土地区地下空间开发由于施工过程中土体的应力释放而引起地层变形,严重时会危及邻近建(构)筑物、道路和地下管线等的正常使用[2-4]。近年来,实时和周期性监测手段被越来越多地应用在基坑开挖过程中,对基坑工程安全与稳定性起着重要的作用[5-7]。随着我国基础设施建设的快速发展,众多新技术和新设备被应用到基坑及其周围环境变形监测[8-9]中,如静力水准仪监测技术、激光传感监测技术以及结合了图像识别技术[10]的视觉传感技术等,都大大提高了监测的精度与效率。
鉴于传统接触式传感器种类多、数量多、成本高、安装与维护困难、设备安装数量受限制、精度与稳定性受环境影响大等特点,本文引入了非接触式的视觉传感监测技术,以期补充目前涉铁工程监(检)测项目的方法体系。非接触式视觉感知体系的优势[8]主要体现在2个方面:(1)视觉传感器将有效减少监测方案中传感器布设点位的数量,降低监测硬件的投入成本;(2)视觉传感器的非接触远距离观测特性,可以在距离数十米或百米之外,对基坑周边土体、高铁桥梁结构进行远距离监(检)测,最大程度地避免受到基坑现场施工的影响,同时也为现场设备的安装与维护提供了便利,为基础设施领域的行业监测带来新的思路。
本文以嘉兴市域外配水工程D6盾构井基坑开挖工程为试验案例,以静力水准仪与视觉传感技术为监测手段,来验证视觉传感技术在深基坑周围土体沉降监测中的适用性。
1 工程概况
嘉兴市域外配水工程(杭州方向)取水口为杭州闲林配水井,起点为杭州仁和节点,终点为嘉兴市各自来水厂。输水线路总长为172.2 km,其中杭州段长为23.1 km,嘉兴段长为148.5 km。输水隧道采用盾构掘进技术开挖。本文取盾构线路中的D6盾构井作为试验场地,D6盾构井北侧约80 m为沪昆高铁桥梁段,西侧约26 m为新河南路路基段,南侧约32 m为S16杭浦高速路基段。隧道施工与运营高铁对周围土体变形影响大,在隧道施工期间,因高铁减速运行及车辆段减速运行,两者直接作用于周围土体,会加剧周边土体的变形,间接影响高架桥墩桩基础承受的荷载,进而威胁高铁桥梁的结构安全。工程概况详见图1所示。
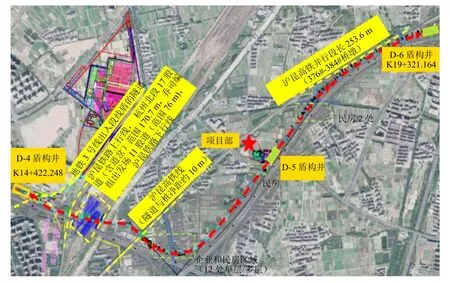
图1 工程概况平面图Fig. 1 Overview of the research site
本项目采用明挖法开展基坑施工,分为 10个施工阶段,分别为:(1)从开始开挖到第二道钢支撑架设完成;(2)从第二层土开挖到第三道钢支撑架设完成;(3)从第三层土开挖到第四道环框梁完成;(4)从第四道环框梁完成到第四道钢支撑架设完成;(5)从第四层土开挖到第五道钢支撑架设完成;(6)从第五层土开挖到第六道钢支撑架设完成;(7)从第六层土开挖到底板浇筑完成;(8)从底板浇筑完成到第五、六道钢支撑拆除完成;(9)从第五道钢支撑拆除完成到第三、四道钢支撑拆除完成;(10)从第三、四道钢支撑拆除完成到顶板浇筑完成。
2 监测方案
2.1 监测目的
高铁高架桥的变形控制要求高,需要尽量减小邻近基坑工程的施工影响。传统接触式传感器种类多、数量多、成本高、安装与维护困难、设备安装数量受限制、精度与稳定性受环境影响大、易掉线。因此,为实时、动态监测基坑施工引起的土体变形,第一时间掌握监测数据,保证工程邻近高铁高架桥的安全运行,引入原位监测系统和视觉传感器系统共同监测土体位移。
2.2 原位沉降监测系统
(1)仪器设备
原位监测采用静力水准系统,该系统采用高精度磁性位移传感器来测量目标监测点位置的高低变化。系统包含多台磁浮子液位传感器(图 2)并由一根Φ14 mm的通液管与Φ6 mm的通气管连接在一起,通气管的作用是保持系统中所有储液罐内部气压相同以保持液面一致。
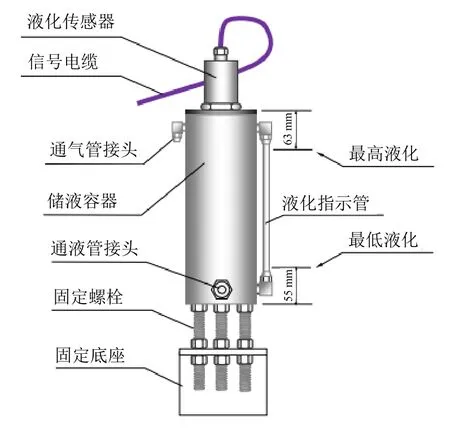
图2 电磁式静力水准传感器组成图Fig. 2 Composition diagram of electromagnetic static leveling sensor
传感器输出为数字接口,每部仪器都有一个可写入的地址,所有传感器只需使用1根4芯电缆即可将测值传输到数据采集装置上。每个静力水准系统必须设置基准测点,当测点处产生相对于基准点沉降或抬升时,测点处储液灌液位随之改变,液位变化带动内部的浮子改变,并被内部的敏感器件所感应最终通过电缆输出。
(2)初始读数获取
液体灌注完毕并确认排气合格,然后让系统平衡几个小时后读取传感器的初始读数。确保读数是在系统处于平衡状态或夜晚等影响比较小的时段进行。信号以水位mm为单位输出。
(3)沉降量计算
任意测点的变化量减去基准测点的变化量即为该测点相对基准测点的沉降量。任意测点的沉降量Sn计算公式为:

式中:Sn为测点n的沉降量,mm;R1n为测点n的当前读数,mm;R0n为测点n的初始读数,mm;R1ref为基准点当前读数,mm;R0ref为基准点初始读数,mm。
其中(R1n-R0n)为测点液位变化量,(R1ref-R0ref)为基准点的液位变化量,即测点的沉降量始终与基准点密切相关。
2.3 视觉监测系统
(1)监测原理
视觉变形监测系统是使用相机拍摄目标结构体,利用计算机视觉感知方法捕捉连续视频流中结构体上的目标点,同步计算出每一时刻目标监测点的空间相对坐标(水平和竖向),并转化为物理坐标系下在水平和竖直两个方向上的实际位移,绘制目标监测点的位移时程曲线。单目相机视觉定位原理见图 3。目前,市面上的视觉监测系统测量距离最远可达500 m,分辨率可达到±0.1 mm(50 m距离),测量精度可达到±0.5 mm(50 m距离)。

图3 单目相机定位常用方法Fig. 3 Common positioning methods of monocular camera
(2)视觉定位
根据监测对象的特点,本文采用了一款人工二维码标靶用来标识目标监测点(图4)。此二维码图案具有唯一性,由计算机系统生成,使用时将其黏贴在目标监测点位置用于定位。相比于直接拍摄目标特征点的方法,二维码标靶对比度高、角点清晰、不受使用场景限制,还可通过设置其编码实现多个靶点同时定位。

图4 定制化二维码标靶Fig. 4 Two-dimensional code for positioning the monitoring target
(3)坐标转换
目标点在二维图像中的位移需通过坐标转换转化为三维物理世界中的真实位移。本文通过solvePnP[11]算法求得了标靶坐标系、相机坐标系、世界坐标系三者之间的变换关系,从而获得目标监测点的三维动态变形信息。
基于物联网技术平台,采用视觉监测技术的位移长期监控系统,可以实现对基坑沉降、公(铁)路桥梁、隧道、地下管廊、建筑物、水利大坝、高塔等大型结构体的位移、振动的实时监测。
2.4 现场部署
D6盾构井围护结构采用1 000 mm厚地下连续墙,2道混凝土支撑和4道钢支撑,地下2层矩形结构,结构外包长度为35.5 m×13 m,顶板覆土厚约 2.5 m,基坑深约 21.65 m。D6盾构井北侧约80 m为沪昆高铁桥梁段。在项目现场,为监测基坑开挖引起的土体变形对邻近高铁桥的影响,将测线设置为从D6盾构井基坑至高架桥桥墩的一根直线。沿着测线安装5个静力水准仪(编号为SL-01、SL-02、SL-03、SL-04、SL-05)和4个视觉标靶点(编号为LT-02、LT-03、LT-04、LT-05)对施工引起的周围地表沉降进行监测,其中SL-01为原位监测基准点。监测点平面布置图如图5所示。

图5 监测布点图Fig. 5 Deployment of the monitoring devices
本项目将视觉监测主机安装在高铁桥墩上,一则有一定高度用于俯视各测点,二则相对稳定。监测主机的供电从施工工地外接电线,公路部分铺设钢管和减速带过渡至桥墩墩顶。其余4个靶点均在工地内,设墩台串管铺设电线即可。基准点则安装在视觉监测主机附近,不易受施工影响的位置。视觉监测主机和SL-02/LT-02之间的距离为13.2 m,SL-02/LT-02和SL-03/LT-03之间的距离为13.43 m,SL-03/LT-03和SL-04/LT-04之间的距离为20.50 m,SL-04/LT-04和SL-05/LT-05之间的距离为38.17 m。SL-04/LT-04和SL-05/LT-05之间为一水塘,分别在水塘两侧安装监测设备。
3 监测数据分析
D6盾构井从2020年8月23日开挖,到2020年11月7日完成顶板,共计1 825 h。图6为SL-02/LT-02、SL-03/LT-03、SL-04/LT-04、SL-05/LT-05号监测点在这1 825 h内的沉降值监测数据。图6中黑点表示由静力水准仪获取的沉降值数据,红点表示由视觉传感系统采集并经坐标转换获得的沉降值数据。图6中横轴为监测时长,h,纵轴为地表沉降值,mm。

图6 监测点视觉监测与原位监测沉降数据Fig. 6 Record of the visual monitoring data and in-situ monitoring data
表 1和表 2记录了各施工阶段不同测点处获得的两种监测方式极值。其中SL表示原位监测方式(静力水准仪),TL表示非接触式视觉传感监测方式。

表1 1-5施工阶段不同测点处两种监测方式极值Table 1 Extreme values of the two monitoring methods at different measuring points in the construction stage 1-5

表2 6-10施工阶段不同测点处两种监测方式极值Table 2 Extreme values of the two monitoring methods at different measuring points in the construction stage 6-10
从图6可以看出:
(1)静力水准仪和视觉监测系统获得的监测数据整体趋势基本一致,均是随着土体的不断开挖,地表沉降值逐渐增大,但随着底板、侧墙和顶板的不断浇筑完成,地表沉降值不断减小。
(2)静力水准仪由于液体受温度、振动的影响较大,故波动比视觉监测要大,导致在每一个测点沉降值整体比视觉监测系统获得的值要大;而视觉监测系统由于识别频率高、受温度和环境振动影响较小,因此稳定性更好,在本次监测中体现出了这一优势。
4 结 论
(1)对于深基坑开挖引起的周边土体沉降变形的长期监测,视觉传感监测和静力水准仪监测获得的变形趋势与现场人工检测数据吻合,证明视觉传感监测系统可用于深基坑开挖引起周围土体变形的实时动态监测。
(2)相较于传统的基于静力水准仪的沉降监测,视觉监测系统的精度可以达到毫米级,在数据的稳定性上有明显的优势。
(3)基于静力水准仪和视觉传感技术的实时沉降监测对控制基坑开挖引起的周围土体变形起到了重要的数据支撑作用,可用于指导施工过程。
(4)从长期监测和定期检测这两个应用需求来看,视觉监测系统的监测设备较少,综合成本要比安装原位传感器低,且安装方式更简单,结合图像识别技术,可作为基坑监测的一种主要手段推广应用。
猜你喜欢
煤气与热力(2022年4期)2022-05-23
防爆电机(2022年1期)2022-02-16
水利水电科技进展(2021年6期)2022-01-07
昆钢科技(2021年6期)2021-03-09
装备制造技术(2020年4期)2020-12-25
仪器仪表用户(2020年11期)2020-11-12
水电站设计(2020年4期)2020-07-16
上海计量测试(2019年5期)2019-11-04
新商务周刊(2018年7期)2018-12-08
湖南畜牧兽医(2016年3期)2016-06-05
