消费级无人机倾斜摄影三维建模与测图分析
2022-01-08 05:44:26刘攀王倩
中国建材科技 2021年2期
刘攀 王倩
(1甘肃建筑职业技术学院,甘肃 兰州 730050;2军地联动应急测绘技术协同创新中心,甘肃 兰州 730050)
伴随电子信息技术、无人机技术的进步,无人机摄影测量技术发展迅速。常规数字测图采用RTK、全站仪等测量仪器进行数据采集和数字化成图产品单一、生产成本高、劳动强度大等缺点不断显现出来[1]。无人机航空摄影测量技术可以有效克服常规测量手段的缺点,成为大比例尺测图的重要手段,采用消费级多旋翼无人机进行小区域三维模型建立,在地形图测绘、地质灾害调查、古建筑保护等方面的应用越来越广泛[2-4]。
当前,倾斜摄影测量主要选用工业级固定翼或多旋翼无人机作为平台,搭载五镜头倾斜摄影相机。工业级无人机和倾斜摄影五镜头相机价格昂贵,各品牌价格从几万到几十万不等。而消费级无人机价格经济,智能化程度高,操纵简便,影像分辨率也高,如民用无人机龙头企业大疆公司的Phantom(精灵)系列就具备高效、便捷等优势[5]。
1 系统简介
1.1 消费级无人机倾斜摄影测量
Phantom系列无人机有一个可调节俯仰角的镜头,通过软件控制镜头,分别在前后左右和垂直方向航拍5遍,以实现与专业五镜头类似的效果。后期的内业处理中采用几何纠正、影像匹配等方式,能从纹理照片数据中进行纹理特征提取并自动贴片,从而构建可视化实景三维模型。
1.2 系统构成
飞行平台:大疆Phantom4 Pro提供飞行动力,接受航线规划软件的指令和飞行航线控制。

图1 无人机倾斜摄影示意图
地面站:通过航线规划软件设置并发送飞行、航线等指令,接收飞机的状态参数,实时显示无人机器飞行状态。
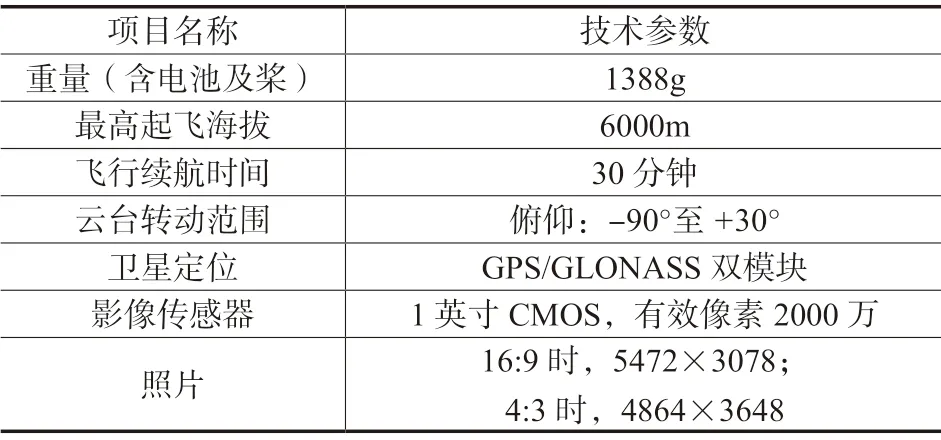
表1 大疆Phantom4 Pro主要参数
三维建模软件:Context Capture,通过导入影像、选刺像控点、空三加密及模型构建等操作即可建立真三维模型,兼容不同来源的影响数据,后期可采用多源数据融合对模型进行改进。
立体测图软件:EPS,可实现裸眼3D在实景三维模型上进行采集作业,对操作人员的要求大大降低。
2 项目实例分析
以兰州市七里河区某区域进行三维实景模型构建为例,测区长、宽均为0.7km,面积约0.5km2,地势平坦,建筑物多,测区中有两栋高层建筑物。技术路线见图2。
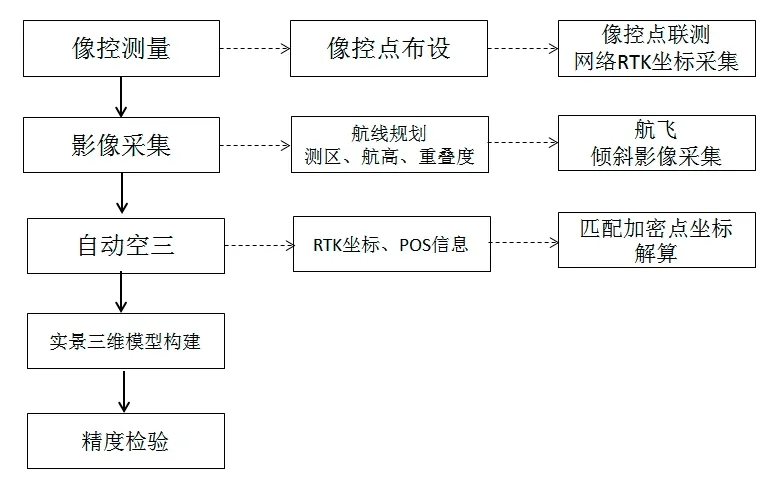
图2 技术路线
2.1 地面像控点布设
借助google地图采用区域网法对测区像控点布设进行设计,在测区周围布设平高点,内部根据需要设置足量的像控点。现场结合油漆喷绘、像控板、道路标记线等多种形式进行布设,优先选取道路标记线,当没有标记线时进行喷绘。共选取16个像控点,采用网络RTK平滑5次测得平均三维坐标以保证精度,其中8个点将用于成果点位精度检验。
2.2 航线规划与影像获取
使用Altizure软件进行航线设计,采用折线型航线进行影像采集。本次航飞的相对航高是120m,航向重叠80%,旁相重叠70%,地面分辨率达到3cm,满足CH/Z 3005-2010《低空数字航空摄影规范》中地面分辨率的要求。
2.3 内业处理
2.3.1 空三测量
运用:Context Capture加载测区的影像,选刺8个像控点,采用光束法区域网平差,将模型纳入地面坐标系。
2.3.2 影像匹配
同名点自动匹配,极大降低工作量,提取大量特征点构成密集点云,在地形复杂、地物繁杂的地区进行密集匹配。见图3。

图3 三维模型
2.3.3 纹理映射
通过计算和匹配后构建三角格网TIN,进而生成白模型,再将纹理从采集的影像中进行提取、映射,得到实景三维模型。
2.3.4 三维成图
采用EPS进行地形图测绘,导入三维模型后进行各种参数设置,绘图员在三维模型上进行各类要素的采集,大大降低了外业工作量,减轻了外业劳动轻度。绘制完成后需要进行外业调绘,对有疑问部分和遮挡部分进行补测等处理。
2.4 精度检验
使用RTK测量8个未使用的像控点进行检查,此8个点均匀分布在测区内,在三维模型基础生成的地形图上采集8个点的坐标。
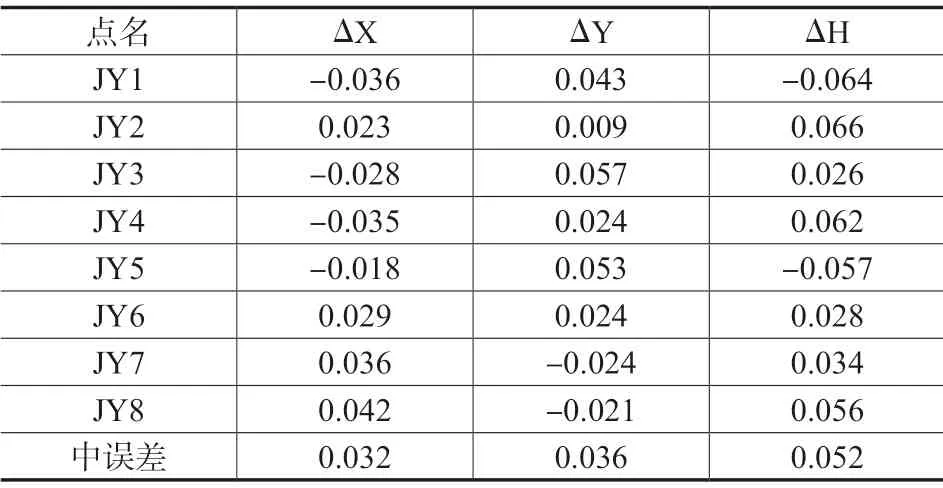
表2 实测坐标与三维模型坐标对比表
X方向中误差为0.032m,最大误差为0.042;Y方向中误差为0.036m,最大误差为0.057m;H中误差为0.052m,最大误差为0.066m。
3 结论
在小范围采用消费级无人机进行倾斜摄影,构建测区的实景三维模型,并进行大比例尺测图,能够满足大比例尺地形图测绘的精度要求,并具有以下优点:硬件价格低,有效降低生产成本;外业劳动强度小,提高作业效率;数据获取智能化程度高;入门简单,影像获取迅速便捷。
猜你喜欢
山东煤炭科技(2022年6期)2022-07-14 03:10:40
江苏安全生产(2022年5期)2022-06-16 07:51:04
华人时刊(2021年23期)2021-03-08 09:27:24
河北地质(2021年4期)2021-03-08 01:59:14
西部交通科技(2021年9期)2021-01-11 12:55:36
中国铁道科学(2019年5期)2019-10-19 07:55:14
智能建筑与智慧城市(2018年11期)2018-11-28 09:04:14
测绘通报(2018年10期)2018-11-02 10:07:28
中国资源综合利用(2017年2期)2018-01-22 02:45:02
北方音乐(2017年4期)2017-05-04 03:40:09