无人机巡检系统在铁路混凝土桥梁检测中的应用
2022-01-08 07:36:52马学志范剑雄柴雪松李会强暴学志李健超
铁道建筑 2021年12期
马学志 范剑雄 柴雪松 李会强 暴学志 李健超
1.中国铁道科学研究院集团有限公司铁道建筑研究所,北京 100081;2.中铁科学技术开发有限公司,北京 100081;3.中国铁路上海局集团有限公司,上海 200071;4.中国铁路广州局集团有限公司,广州 510699
21世纪以来,随着我国铁路技术快速发展,铁路运营里程不断增加。我国地域辽阔、地形复杂,铁路桥梁数量也随之不断增加。为保障列车运行和出行人员的安全,铁路桥梁安全隐患排查成为铁路工作者的工作重点。传统桥梁检测手段存在效率低、作业危险性高、盲区多等问题。近年来,无人机技术日益成熟,在工程中越来越多地得到应用[1],使得无人机巡检代替传统检测手段进行铁路桥梁病害检测成为可能。
无人机是通过人远程控制或程序自动控制的不载人飞行器,通过安装在无人机上的高清相机、激光测距仪等传感器获取待测物体相关信息。本文从铁路桥梁检测方面将无人机巡检和现有桥梁检测手段进行对比,介绍无人机数据处理方法,并通过现场试验证明处理算法的可行性。
1 铁路桥梁检测现状
我国现有铁路桥梁超过20万座。随着运营时间增加,桥梁中裂缝、蜂窝麻面、钢筋锈蚀、支座异常变位等病害呈多发趋势,存在一定的安全隐患,甚至危及行车安全。因此铁路桥梁定期检测,及时发现、处理问题显得尤为重要。目前主要通过简易检测平台、桥梁检测车、桥底检修通道[2]进行铁路桥梁病害检测。
简易检测平台主要是借助梯子、脚手架,使检测人员靠近桥梁,通过目视观察或利用尺子、测宽仪等工具检测桥梁病害。该检测方式的缺点是:①效率低下,梯子和脚手架体积较大,搬运、搭建比较耗时;②人员成本较高,需要多人配合完成;③使用场景受限,只适用于净空较低且桥梁底部环境相对简单的桥梁检测;④安全性较差,登高作业存在一定风险。
桥梁检测车上搭载有机械平台或检测设备,作业时机械臂伸展至桥梁附近,使检测人员或检测设备靠近桥梁进行检测[3]。机械臂伸展开时可缓慢行驶,相比于简易检测平台其效率和安全性得到提升,但也存在缺点:①桥梁检测车价格较高;②使用场景受限,只适用于车辆可接近的铁路桥梁。
桥底检修通道是建设期或运营期设计建造的,贴近桥梁底面或桥墩,方便桥梁底部检测的悬挂式通道。其不足之处在于:①检修通道位置固定,只能检测通道附近位置;②只有个别桥梁拥有检修通道,不能推广应用。
随着飞行控制、无线遥感等技术的快速发展以及机载传感设备的轻量化、多样化,国内外许多学者都在积极探索其在桥梁检测中的应用。2015年Waheed等[4]在无人机上安装非接触式多光谱传感器,用于快速识别桥梁表面开裂及内部分层情况。2016年美国特拉华河湾管理局利用无人机对特拉华纪念桥进行检查,确认桥梁状态。2017年Oreifej等[5]在无人机上搭载热成像仪对两座桥梁进行检测,核查混凝土桥梁面板中的分层情况。2017福建省南平市公路局利用无人机检测金溪大桥时发现多处裂缝、加固钢板锈蚀、弦杆贯穿性断裂、混凝土剥落等病害[6]。2018年张平等[7]利用两架无人机分别采集了重庆万州长江公路大桥的视频和高清图像,发现多处裂缝、钢筋锈蚀等病害。2020年刘威等[8]耗时2 h,依据预先规划的8条无人机飞行路径,完成了惠平路藻浜大桥的全面检测,检测精度可达厘米级。
目前无人机在桥梁检测中主要用于检测较大尺寸的病害,对毫米级甚至不足1 mm宽度的裂缝检测效果不佳,因此本文主要研究宽度不足1 mm的裂缝等细小病害的数据采集、自动识别及特征信息的提取。
2 无人机巡检系统
无人机巡检系统由数据采集、处理两个子系统构成。数据采集子系统集成在无人机上,主要用于完成铁路桥梁图像数据的快速采集、存储,数据处理子系统部署于机房,用于完成铁路桥梁图像数据的自动分析,识别出其中的病害并计算其长宽等特征信息。
2.1 数据采集子系统
数据采集子系统由无人机、相机模块及机载计算机控制软件组成。
1)无人机
无人机选用大疆经纬M300,该无人机具备24 h全天候长续航能力,能够满足铁路桥梁检测长时间作业要求,配备双惯性测量单元(Inertial Measurement Unit,IMU)、气压计及指南针,配合智能电机驱动器,提供了敏捷、稳定、安全的飞行性能。这些配置可避免对铁路桥梁检测时无人机侵入铁路限界,对行车安全造成威胁。
2)相机模块
相机模块选用大疆禅思H20,该相机模块集成2 000万像素变焦相机、1 200万像素广角相机、30 Hz热成像相机及探测距离达1 200 m的激光测距仪于一体,同时配备水平方向±320°,垂直方向-120°~+30°大角度云台,可满足不同检测需求。
相机成像是将世界坐标系下的物体转换到图像像素坐标系下,用像素的多少来表示物体的实际大小。由于广角镜头存在畸变,导致图像变形,严重影响桥梁病害的自动识别,故铁路桥梁病害检测中需使用相机模块中的变焦相机。依据相机成像原理,只有当相机云台角度为0(相机光轴垂直于待检桥梁表面)时采集到的图像才不会发生变形,才可以准确提取病害长宽等特征信息,故须保持相机云台角度始终为0,“正视”待检桥梁表面。相机模块配合M300无人机可实现打点定位、精准复拍功能,方便桥梁多次检测作业,便于历史检测数据的对比分析。
3)机载计算机控制软件
机载计算机控制软件主要用于依据设定的图像采集策略,自动控制数据的采集,减少操作人员的工作量。
无人机巡检距离(与待检桥梁的水平距离)和镜头焦距是直接影响成像清晰度的关键参数。巡检距离不变,焦距越大,像素精度越高,成像越清晰;同样,焦距不变,巡检距离越近,像素精度越高,成像也越清晰,但单张图像分辨率固定时像素精度越高意味着视野越小,采集效率越低,故须选择合适的巡检距离和镜头焦距。
铁路桥梁表观裂缝宽度通常在0.2~1.0 mm,因此必须保证图像具备足够高的像素精度,才能使裂缝等细小病害清晰成像。采用打印有不同宽度横线的A4纸靶标模拟铁路桥梁裂缝,见图1(a)。通过改变无人机巡检距离、镜头焦距等参数获取试验状态下的不同图像。
以不同巡检距离、镜头焦距拍摄悬挂于垂直墙面上的裂缝靶标。巡检距离过近存在无人机碰撞隐患,过远则会导致图像不清晰;焦距过大会影响采集效率,过小会导致图像精度不足。经过多次试验,无人机巡检距离为5 m,镜头焦距为150 mm时图像清晰度和采集效率比较好。利用此参数采集到的铁路桥梁裂缝见图1(b)。经现场测量L1裂缝宽0.2 mm。该裂缝在图中清晰可见,证明无人机巡检距离为5 m,镜头焦距为150 mm时采集到的图像像素精度优于0.2 mm,将此参数组合设置为机载计算机控制软件的默认参数。

图1 试验用靶标及采集到的混凝土铁路桥梁裂缝
H20相机模块单张图像分辨率为5 188×3 888,若要满足像素精度优于0.2 mm,则单张图像视野约1 m,极有可能无法包含完整病害,影响自动识别结果。为保证检测出完整病害,得到病害准确位置与尺寸,须将多张原始图像拼接成完整大图,在大图中检测病害并获取其准确位置。这就要求采集图像时相邻图像有一部分重合。经多次计算,相邻图像重合25%左右可确保拼接准确。在机载计算机控制软件中设置相机等距离采集图像数据,同时获取无人机当前位置经纬坐标、测距传感器距离、相机云台角度、镜头焦距等数据,同步保存至图像属性信息中,并完成各类数据的匹配融合,用于后续数据处理。
2.2 数据处理子系统
数据处理子系统包括数据处理服务器和数据存储单元。
1)数据处理服务器
数据处理服务器主要用于完成无人机图像拼接、病害自动识别及其特征信息的提取。
①图像拼接
图像拼接采用sift匹配算法[9-11]。首先在两幅图像中大概重合区域分别检测sift特征点,同一特征点的特征向量必然是相同或相似的,故需寻找两幅图像中特征向量最相近的两个点组成一个匹配点对,见图2。其中每条线两端连接的就是一个匹配点对,由多个匹配点对计算得到表示两幅图像相对关系的变换矩阵。利用该矩阵可将两幅图像统一到同一个坐标系下,进而完成两幅图像的准确拼接,见图3。

图2 相邻图像匹配结果

图3 图像拼接效果
重复拼接过程,即可得到反映整座桥梁的完整大图。对大图进行自动识别,可检测出完整病害,并对病害准确定位。
②病害自动识别及特征信息提取
采用了基于PSPNet的语义分割网络[12]对病害样本库进行训练。由于组成PSPNet网络的ResNet101参数多,严重影响训练速度,故采用改进后的ResNet18作为分割网络的特征提取网络(主干网络)。由于裂缝、掉块等病害尺寸相差较大,故采用PPM网络作为解码网络。解码网络可以将卷积神经网络中提取的特征信息转换为分割结果,并且可以处理不同尺度的图像,提取不同子区域之间的上下文信息,最终生成精确的分割图。
病害自动识别算法流程见图4。首先建立样本库,使用标注工具对超过1 000张图像进行像素级语义分割标注,建立桥梁病害样本数据集,按一定比例分为训练集和验证集;然后构建基于编码(ResNet18网络)-解码(PPM网络)架构的深度神经网络伤损分割模型[13-14],将训练集中的图片输入到分割模型的编码网络中提取特征信息,输入到解码网络中生成对象分割结果,持续进行模型训练;最后通过验证集对模型识别能力进行评估,找到最优的模型参数,实现对裂缝、梁缝、掉块等不同桥梁病害的自动化检测、病害趋势分析和状态评定。
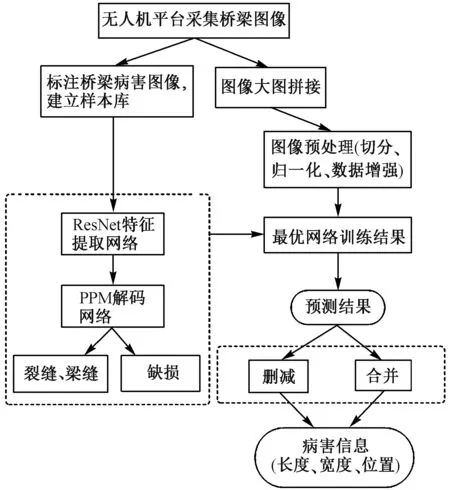
图4 自动识别算法流程
针对识别出的裂缝病害,采用基于中轴线的裂缝宽度计算方法,结合三次cardinal样条插值拟合裂缝边缘,从而获取反映裂缝实际宽度的亚像素宽度。
2)数据存储单元
数据存储单元主要用于存放无人机历次检测原始图像数据及其处理结果,需满足容量大、安全性高的要求。选用工业级磁盘阵列充当数据存储单元,容量不低于40 TB,可存放不少于500 km铁路桥梁无人机数据。数据存放过程中按照线路名称-检测时间分级存放,方便进行历史检测数据的对比,重点关注新增病害和旧病害的持续发展。
3 现场试验
为测试无人机巡检效果,2021年4月对朔黄铁路潴龙河特大桥进行了试验,该桥为44×32 m预应力钢筋混凝土桥,全长1 452 m。试验中检测了第8跨、第9跨梁体的上下行线。梁体检测分4次完成,每次检测一跨一侧。由于要求像素精度小于0.2 mm,故检测单侧梁体时也需采集多张图片。
检测过程中按从小里程往大里程的方向进行,由机载计算机依据预先设置的参数组合自动采集图像数据。检测过程中无人机飞行轨迹如图5所示。图中一个小方格代表一张图像,检测一跨单侧梁体用时30 min,检测桥梁两跨共用时2 h。

图5 无人机飞行轨迹示意
两跨梁体数据处理时长见表1。计算可得:处理一跨32 m梁体单侧数据总用时249.25 s。

表1 两跨梁体数据处理时长 s
裂缝现场实测值与无人机巡检系统检测值对比见表2。可见:现场实测的裂缝均被准确识别出来,且实测值与检测值的长度误差不超过50 mm,宽度误差不超过0.1 mm。这表明无人机巡检系统采集的图像数据清晰有效,数据处理算法满足需求。
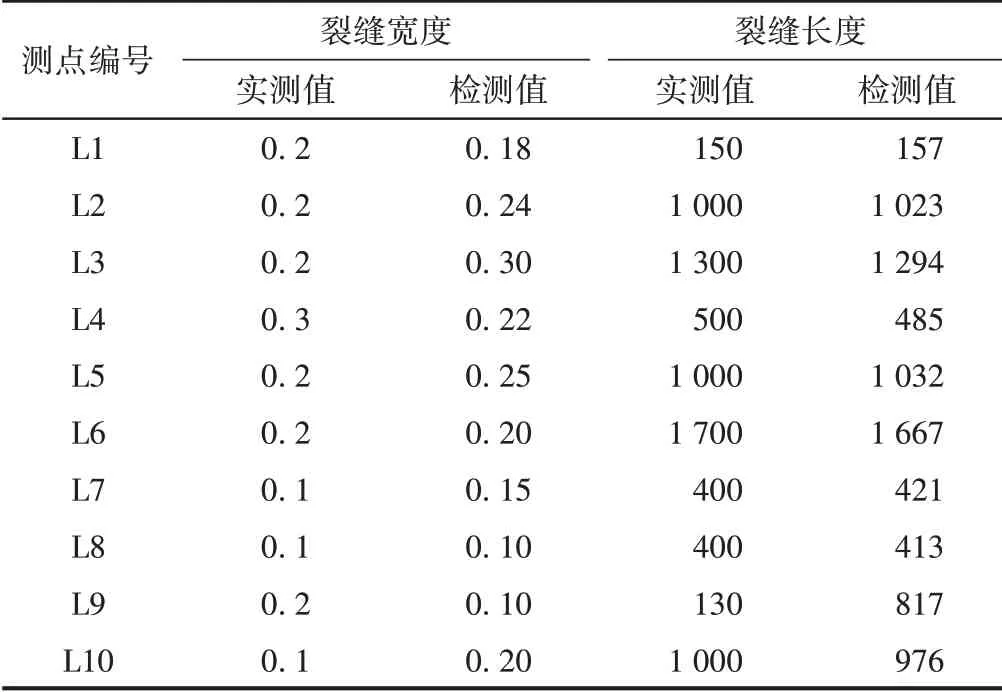
表2 裂缝现场实测值与无人机巡检系统检测值对比mm
4 结语
针对传统铁路桥梁检测手段的局限性,结合国内外无人机在桥梁检测方面的应用现状,设计了无人机巡检系统,用于检测铁路桥梁表面病害。该系统通过选用合适的参数组合,合理安排无人机图像采集路径,可检测并自动识别出宽度0.2 mm裂缝等细小病害,对铁路桥梁养护维修具有实用价值。
猜你喜欢
心理学报(2022年4期)2022-04-12 07:38:02
摄影与摄像(2021年12期)2021-10-01 14:23:33
艺术品鉴(2021年21期)2021-08-15 05:54:58
水泵技术(2021年3期)2021-08-14 02:09:20
铁道通信信号(2020年1期)2020-09-21 08:54:50
锦绣·上旬刊(2020年3期)2020-06-08 09:43:52
智能城市(2018年7期)2018-07-10 08:30:26
铁路技术创新(2015年3期)2015-12-21 12:55:48
中国惯性技术学报(2015年1期)2015-12-19 13:12:17
中国塑料(2015年11期)2015-10-14 01:14:11