关于超声波测距报警系统的教学课题设计
2022-01-07 03:19杨立君孟建建
电气电子教学学报 2021年6期
郭 林,杨立君,王 城,孟建建
(1.南京邮电大学 现代邮政学院,江苏 南京 210003;2.南京邮电大学 物联网学院,江苏 南京 210003)
0 引言
随着当前社会发展,小汽车正开始融入每一个家庭,车辆日益增多,但是汽车造成的道路安全正在逐年增加[1]。随着我国汽车生产量和持有量的快速增长,高速公路的快速延伸,如果不加大汽车交通安全控制,交通安全事故会大量增加,造成更多的伤亡和经济损失。交通事故主要表现形式是碰撞,其中大部分是车-车碰撞和人-车碰撞。
专家对汽车交通事故的分析结果表明:若驾驶员能提早1秒钟意识到会有交通事故发生,及时采取正确的应急措施,则绝大多数事故都是可能避免发生的[2]。
发展智能交通系统与智能车辆技术能够有效解决我国交通安全问题。本文设计基于超声波测距技术的智能化汽车车距报警系统,组建大学生创新研究团队并实现设计目标。理论证明,这套系统能够有效避免追尾事故的发生,对人民生命安全做出更好的保障。
1 汽车超声波测距智能报警系统原理
汽车距离测量报警系统是在汽车行驶过程中,对汽车前方向的物体进行距离检测,在汽车与前面物品距离达到一定值时进行声音报警,提示驾驶员危险物的距离以及危险程度,以便让驾驶员采取相应的措施,避免交通事故的发生。
汽车防撞预警系统由信息采集、信息处理、信息判断、预警信息等四个部分组成[3]。本设计的系统框架如图1所示。系统采用STC89C52单片机为控制核心,单片机内含有Flash程序存储器,SRAM,UART,SPI,AD,PWM等模块。系统的信息采集采用超声波测距技术系统,超声波探头选用的是UCM40T/R[4-5]。
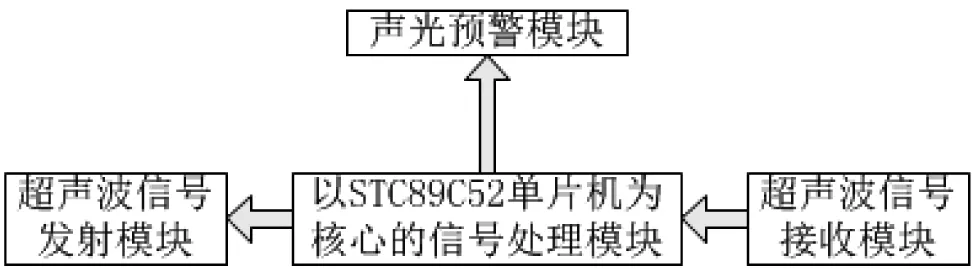
图1 系统框图
2 信息采集
目前,汽车测距多采用红外线和超声波传感器,因红外线测距信号速度快,不易捕捉,易受背景光影响,抗干扰性差,并且反射光强度受被探测物外表光滑度、颜色等因素影响。超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,利用超声波检测往往比较迅速、方便、计算简单、易于做到实时控制,并且在测量精度方面能达到工业实用的要求。所以本课题使用超声波技术来测量汽车车距。
超声波在空气中传播功率及精度与频率成正比,比较和分析几个常用超声波频率的特点,最终选取频率为40 kHz。
超声波测距仪器一般由发射器、接收器和信号处理与系统控制装置三部分组成,如图2所示[6]。

图2 超声波测距系统框图
工作时,超声波发射器不断发出一系列连续的脉冲,并给测量逻辑电路提供一个短U脉冲。超声波接收器在接收到遇障碍物反射回来被探头接收,转换为电信号,由低噪声运放OP07构成的两级同相比例电路放大,再由LM567音频译码器选频滤波,消除噪声后,由I/O端口送入STC89C52单片机,单片机由超声波发出到接收的所用时间,经数据处理得出障碍物与小车距离。
3 信息处理
研究表明[7]声音在标准大气压下空气中的传播速度为:V=340 m/s。当汽车前方有障碍物时,根据STC89C52单片机的计时器记录的时间T可以计算出发射点距离障碍物的距离x2。即:
(1)
在汽车行驶中,系统通过仪表盘反馈的汽车速度,根据《物理学》[8]有加速度公式:
V2=2×a×x1
(2)
摩擦力公式:
f=μ×m×g
(3)
根据式(2)和(3)计算出安全车距x1。
4 信息判断
每当汽车行驶时,前方有另外汽车时,通过超声波测距仪测得两车距离x2的数值,并在STC89C52单片机上做一个数据分析,进行安全预警。当x2小于x1时,单片机就会控制蜂鸣器,数码管发出预警信息[9-10]。
5 预警信息
预警信息部分主要进行危险级别判断、危险方向以及相应的声光报警。该系统的预警部分由蜂鸣器,数码管组成。
单片机将与障碍物的距离显示在数码管上,并且当x2小于x1时,控制蜂鸣器发出声音提醒驾驶员。未来可嵌入汽车制动模块,在紧急情况下控制汽车进行强制制动[11-12]。
6 程序设计
程序启动后,进入工作状态,开始进行超声波距离测定,流程如图3所示。当检测到障碍物,进入数据处理,如果得到的安全距离大于预设阈值或无障碍物,程序进入超声波测距循环。如果安全距离小于阈值,程序进入报警状态,数码管显示汽车与障碍物之间的距离并用蜂鸣器发出声音提醒驾驶员。
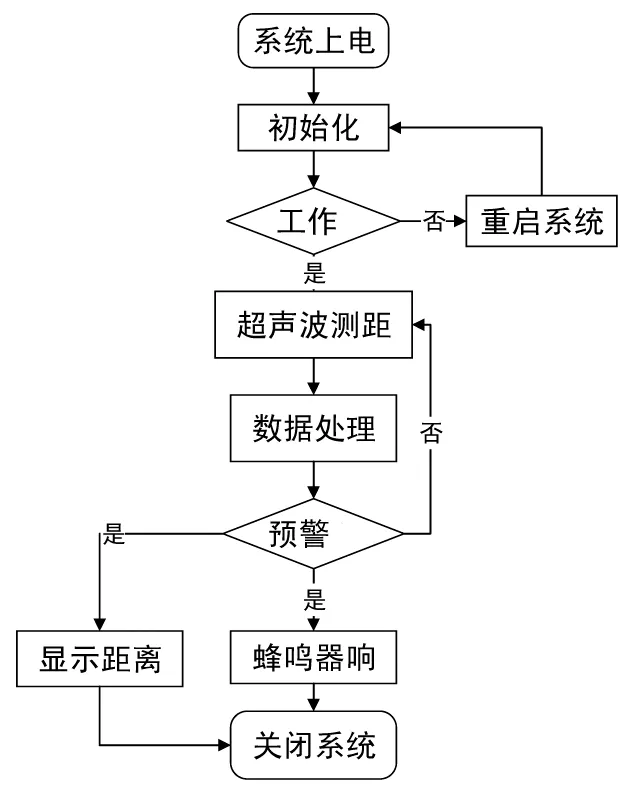
图3 系统程序流程
7 系统测试
汽车超声波测距系统测试在实验室里模拟进行,汽车用智能小车来替代。首先设计好小车行驶路径,障碍物用相同材质、颜色、形状放置于小车前进路径中,测试结果数据如表1所示。

表1 测试结果
结果表明,该系统在较低的误差下,能有效的测量与障碍物之间的距离。
当超声波传感器探测出前车安全距离小于阈值,系统在数码管上显示距离结果进行报警操作,如图4所示,且报警操作的响应时间延迟为ms量级,具备足够的灵敏度以提醒驾驶员减速规避汽车行驶中的潜在风险。

图4 超声波传感器及距离显示数码管
8 结语
本课题所设计的基于超声波测距技术的智能化汽车车距报警系统具有精度高,可靠性好,成本低,技术成熟等特点。系统将超声波模块、STC89C52单片机、数码管显示模块、蜂鸣器模块连接起来,系统通过超声波测距技术得到与障碍物的距离,再把距离与安全距离做比较,如果汽车与障碍物的距离小于安全距离,系统将控制蜂鸣器报警。
随着汽车防碰撞系统功能的不断健全和提升,道路交通安全事故将会得到有效的控制,从而使我们的行车生活处于舒适、安全之中。本课题设计是从电子技术知识综合应用角度出发来实现的,课题的成功研发大大提高了大学生创新团队分析工程实践中遇到的问题并综合运用所掌握的知识解决问题的能力。
猜你喜欢
疯狂英语·初中天地(2022年9期)2022-08-29
科教导刊·电子版(2021年36期)2021-01-02
电脑报(2020年12期)2020-06-30
科学(2020年3期)2020-01-06
电脑报(2019年2期)2019-09-10
科技风(2019年13期)2019-06-11
时代农机(2019年2期)2019-04-24
时代农机(2019年2期)2019-04-24
电子制作(2017年7期)2017-06-05
汽车维护与修理(2016年10期)2016-07-10