
载人航天器内菌斑清除装置设计及初步应用验证
2022-01-07 09:14杨建楼孙儒馨张兰涛赵继丁付玉明
航天器环境工程 2021年6期
杨建楼,孙儒馨,张兰涛,赵继丁,付玉明,2*,刘 红,2,3
(1. 北京航空航天大学 生物与医学工程学院; 2. 北京航空航天大学 生物医学工程高精尖创新中心;3. 北京航空航天大学 国际航空生物技术与医学工程联合研究中心:北京 100191;4. 北京空间飞行器总体设计部; 5. 北京卫星环境工程研究所:北京 100094)
0 引言
在空间站内等载人航天器舱内环境条件下的微生物受微重力、空间辐射等因素的影响,其生态系统的种群结构、生理生化性状等会发生明显变化,原本对人体和环境无害的微生物种群会在生长繁殖、毒力、致病性、抗生素敏感性、突变率等方面产生变异[1]。如不加以控制,这些微生物不仅将加剧对材料的腐蚀,损害电子元器件及结构件,影响航天精密仪器的正常使用,还会扩散到舱室内的空气和水中,严重危害航天员健康。因此,需要对载人航天器舱内微生物进行严格防控。
目前,载人航天器舱内微生物控制措施主要分为两大类。一是主动控制[2],主要包括使用空气过滤装置去除空气浮游微生物,使用吸尘器和浸有去污剂或消毒液的擦布清洁舱内表面等[3]。“和平号”空间站[4]在轨运行期间,每周会安排一天(通常为周日)全员参与的大扫除;在国际空间站(ISS)美国舱段,每周会安排4 h 的清洁,使用一种便携式吸尘器、6 种消毒湿巾(消耗型,每次任务补充),以及去污剂和擦布等,对舱内环境进行清洁消毒[5-6]。但是采用真空吸尘器、擦布、湿巾或者棉签擦拭方法很难触及设备背板、一些死角和缝隙中的菌蚀斑,因此这些部位必须在设计建造时采取一些防护措施[7]。另外,这些方法消耗性材料使用较多,且工作量大,也无法快速有效地杀灭菌蚀斑。二是被动控制,主要通过优化舱内环境设计、选择抗菌防霉材料[8]、对舱内材料表面进行处理[9]等措施来抑制微生物生长,防范微生物可能导致的风险[10-11]。被动控制一般是载人航天器飞行前在地面进行处理;而主动控制通常是要求航天员在轨进行操作,相对被动控制而言,其操作空间和清洁手段等有一定局限性[12-13],且直接关系到载人航天器的使用状况,因此主动控制还需要不断优化。
载人航天器舱内面板背侧(简称背板)和壁板上均密布各种线缆及接线端子,背板和壁板之间的距离较小[14-15],在使用专门装置进行菌蚀斑清除时,要求既能绕过线缆及接线端子进行大范围有效清除与收集腐蚀部位的菌蚀斑,还适合在微重力条件下施用。
2001 年,俄罗斯开始在“和平号”空间站和国际空间站采用一种叫做POTOK 150MK 的空气微生物控制设备,其原理是利用脉冲电产生等离子体杀菌结合过滤网过滤[16]。目前在国际空间站上使用一款干湿两用的吸尘器[17],该吸尘器由直流电机驱动[18],采用两级过滤装置:一级过滤使用一次性袋子来收集潮湿或者干燥的、直径>6 μm 的颗粒物;二级过滤是一种高效空气过滤器(high efficiency particulate air filter, HEPA),可以过滤直径>3 μm的颗粒。另外,该吸尘器还包括针对缝隙的清洁工具、刷子工具、灵活的模块化工具和表面工具。但是这些吸附过滤方法不能杀死微生物,而是将微生物留在滤材中,需要定期更换滤材,由此增加了航天员工作量,且产生大量耗材垃圾,提高了成本。
我国载人航天事业开展较晚,在“神舟”系列飞船任务中,由于飞行时间短,微生物控制的重要性未得到体现,导致我国空间微生物控制技术研究相对薄弱,技术积累不足,且未开展适用于微重力条件的材料表面菌蚀斑清除等研究工作。而随着中国空间站建设的不断推进,我国对航天器微生物控制研究日益重视。本文针对如空间站等载人航天器舱内菌斑清除任务需求,以及航天员在轨对清除装置简单易行、清除率较高从而可提高任务效能的需求,提出一种在轨菌斑清除装置工艺方案,并构建出原型系统进行初步验证。
1 菌斑清除装置
1.1 工艺原理与基本组成
针对微重力条件下背板、狭缝等位置高黏度菌蚀斑腐蚀的有效清除,以及在清除过程中避免微粒扩散到空气中漂浮、存活的需求,本文提出的工艺原理是:利用“机械摩擦+负压抽吸+有效杀灭”的方式完成材料与设备表面菌斑清除、收集与杀灭,即:采用毛刷高频振动清除菌蚀斑,清除下来的菌斑微粒被负压抽吸气流吸入带有250~280 nm AlGaN紫外LED 灯珠的管道内部,最后由滤网对菌斑进行拦截收集,滤网附近的紫外LED(或者管道的等离子体发生器)对被拦截收集的微生物进行消杀。在太空在轨条件下,根据航天任务,用探测装置或者肉眼识别易滋生菌斑的位置后利用该装置进行菌斑清除。该装置不用时可置于铝合金外包盒内,外包盒可通电从而可对装置进行紫外消杀;其供电方式采用有线航空插头,直流24 V。
本文提出的未来可用于空间站的菌斑清除装置结构主要由振动清除系统、负压收集系统、紫外(或等离子体)杀菌系统和电路控制系统组成,采用分体式结构思想,由刷头杀菌盖、清洗头、快拆收集箱、座体组成(见图1(a))。刷头杀菌盖(见图1(b))内安装有紫外线灯,可通过MicroUSB 为紫外线灯供电,对非工作状态下的刷头进行杀菌处理。清洗头(见图1(c))由快拆刷头、刷头电机、同步带轮机构和旋转调节头组成,其中:快拆刷头可根据任务需求快速拆装;刷头电机利用同步带轮带动刷头旋转,具有过载保护功能;旋转调节头提供0°、45°和90°三个可调角度,便于深入拐角处进行清洁。快拆收集箱(见图1(d))可以对收集到的菌斑进行杀菌和储藏,包括快拆外壳、紫外线灯环、过滤网(材料为HEPA 滤网)和4 个电气触点,其中:5 个1 W 的并联紫外线灯珠均匀布置在灯环上,并通过2 个电气触点供电;另外2 个电气触点则分别为清洗头电机和紫外线灯珠供电;过滤网为可拆卸式,需要更换时倒置快拆收集箱即可取出。

图1 菌斑清除装置结构Fig. 1 Structure of plaque removal device
1.2 原理样机载荷强度仿真
由于使用过程中,清洗头直接与舱内材料和设施表面的菌斑刚性接触,所以有必要对装置结构进行强度校核分析,以验证该装置在特定工况下是否可以安全、稳定地完成指定任务。此外,在满足功能要求的基础上,还需尽量减轻机体重量,优化外观,以进一步满足操作人员舒适便捷的使用需求。
利用ANSYS Workbench 有限元分析[19]软件中的静力学分析模块模拟了菌斑清除样机在实际使用过程中的受力情况,材料设置为树脂。
首先对菌斑清除装置的样机在握持时的结构受力状态进行强度校核。仿真时,固定菌斑清除样机尾部,并在清洗头处施加30 N 垂直向下的力,仿真结果如图2 所示。可以看出,清洗头处最大位移为0.9 mm,最大应力为3.8 MPa,远远小于树脂材料的屈服强度(271 MPa),满足使用要求。
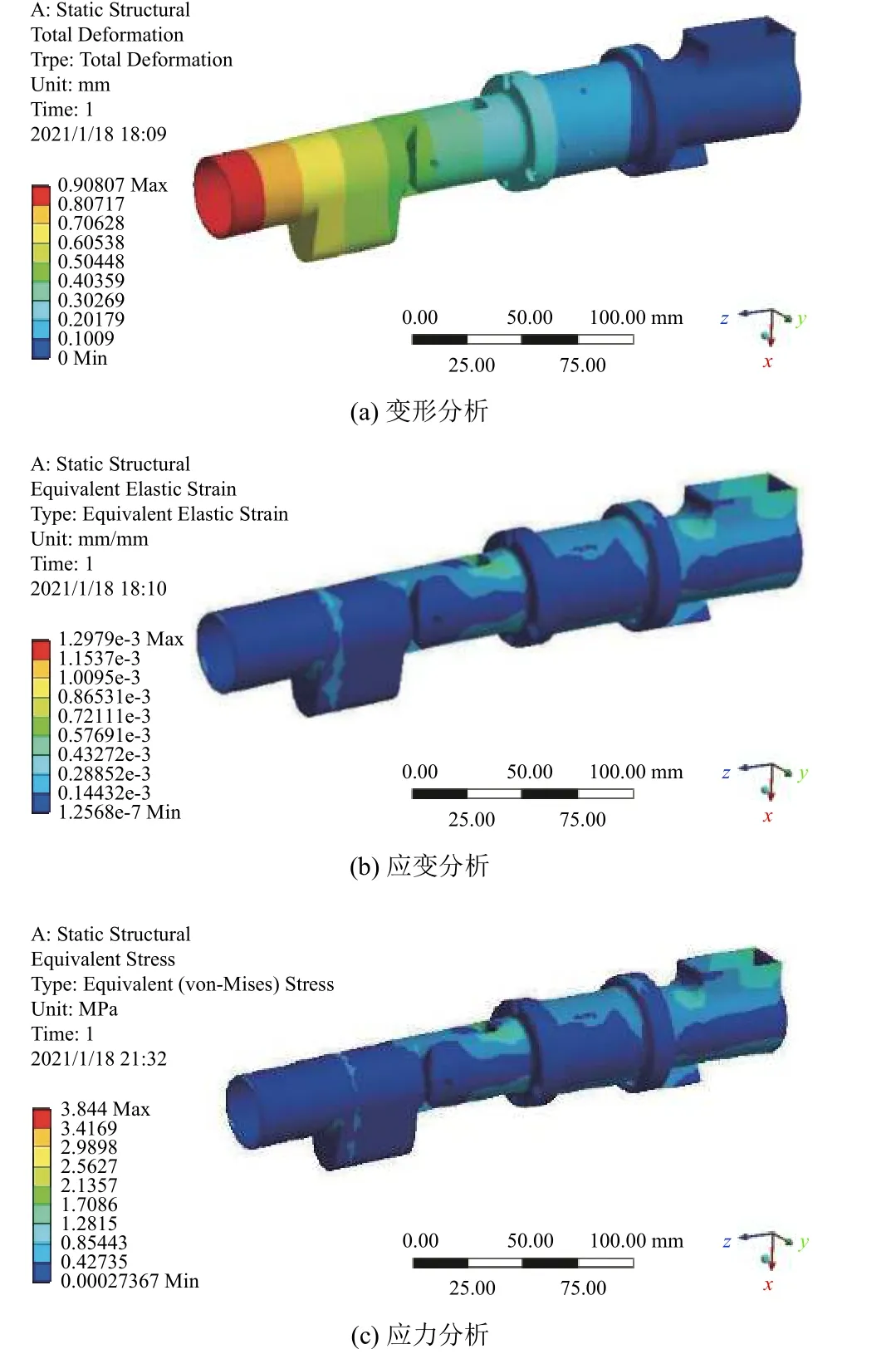
图2 握持时菌斑清除样机力学分析Fig. 2 Mechanical analysis of the plaque removal prototype during gripping
然后对菌斑清除样机的3 种使用状态(旋转调节头夹角分别为0°、45°和90°)进行强度校核。仿真时,固定菌斑清除样机尾部,并在清洗头处垂直于清洗头施加0.7 MPa 的压力,结果如图3 所示。
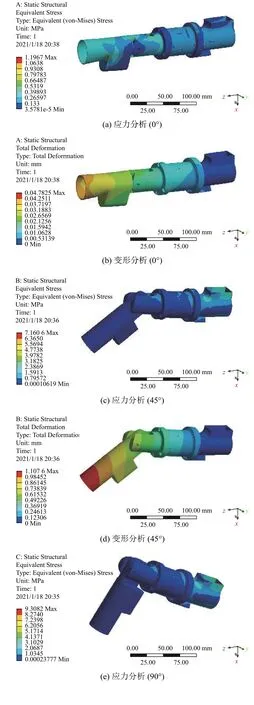
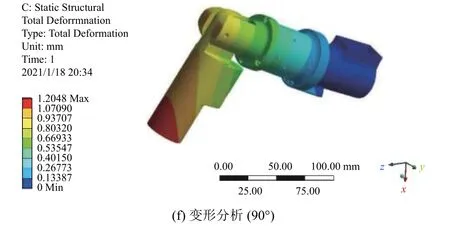
图3 菌斑清除样机应力和变形分析(旋转调节头夹角分别为0°、45°和90°)Fig. 3 Stress and deformation analysis of the plaque removal prototype when used at angles of 0°, 45° and 90°
由图3 可以看出,菌斑清除样机在3 种使用状态下的应力均远小于材料的屈服强度,装置总体变形在允许范围(10~15 mm)之内,工艺满足使用要求。
2 原理样机参数优化
2.1 负压抽吸风速参数优化
选取空间站常见的具有腐蚀性的微生物菌种黑曲霉(aspergillus niger)、芽枝状枝孢霉(botrytis cinerea)和金灰青霉(penicillium aureus)[20-22],以及常用于空间站的有机材料(橡胶与聚氨酯),在模拟空间辐射舱室环境的培养箱中[23]进行材料表面染菌实验。首先模拟微生物腐蚀过程,制备实验所需的微生物腐蚀材料;然后设置不同的风速对材料表面的菌蚀斑进行清除收集,以优化风速。
制作的被真菌腐蚀的材料如图4 所示,真菌在其表面大量繁殖,产生大量的真菌孢子。微生物数量计算方法是:采用马铃薯葡萄糖琼脂培养基(potato dextrose agar; PDA)涂布,28 ℃培养3~5 天后计数。
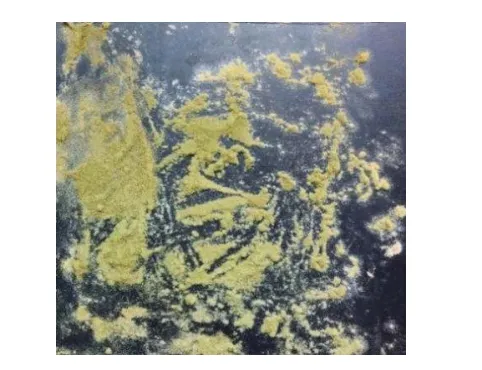
图4 人为制备的橡胶材料表面菌斑(金灰青霉)Fig. 4 Artificially prepared plaque on the surface of rubber material (penicillium aureus)
在实验中,针对4 种不同风速进行分析,收集与清除效率A=(1-n/N)×100%,其中n和N分别为清除后和清除前的材料表面微生物量,CFU/mL。结果如图5 所示:随着风速的增加,菌斑的收集与清除效率越高,但是在较高风速(20 m/s 和25 m/s)的情况下,通过t 检验p值大于0.05,表明收集率无显著差异(p=0.4724),二者收集率均值分别在91%和92%。考虑到风速越高,装置能耗越大,因此认为20 m/s 已经满足设备的风速需求。
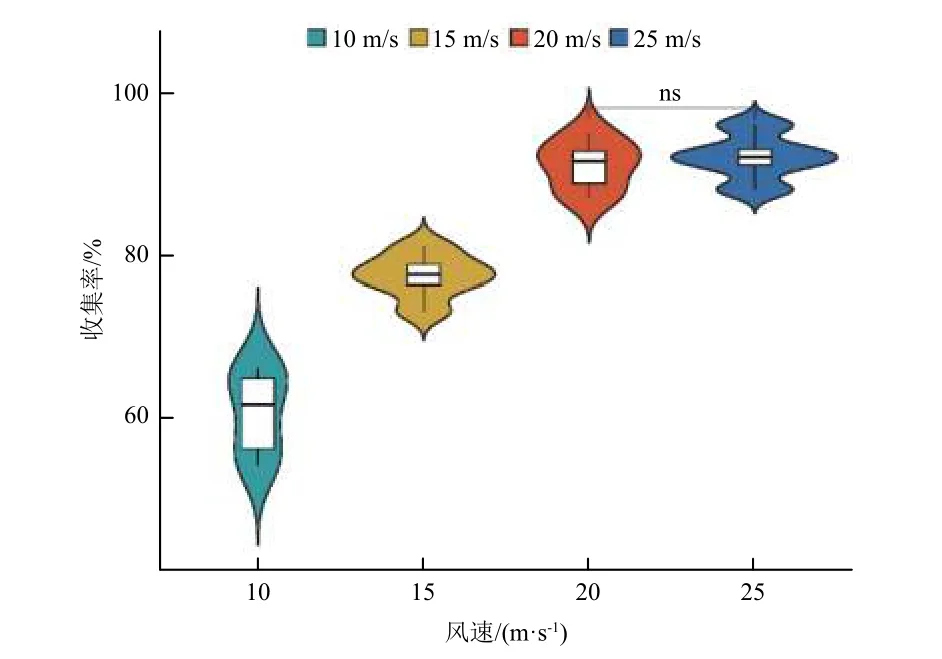
图5 风速对收集效率的影响Fig. 5 Effect of wind speed on filtration efficiency
2.2 紫外LED 灯功率和光照时间优化
以不同的紫外灯功率(3 W、4 W、5 W)和光照时间(1 min、3 min、10 min)对滤菌后的滤膜进行处理。采用培养计数方法对杀菌前、后滤膜上微生物进行计数。杀菌效率B=(1−n/N)×100%,其中:n和N分别为杀菌后和杀菌前的材料表面微生物量,CFU/mL。
实验得到不同紫外灯功率和光照时间下样机杀菌模块的灭菌效率,整合数据绘图各组杀菌效率如图6 所示。可以看出,紫外灯功率的升高和光照时间的延长都可以提高微生物的杀灭效率,利用5 W紫外灯照射10 min 后的杀菌率可以达到99.5%,在本组实验中效果最佳。
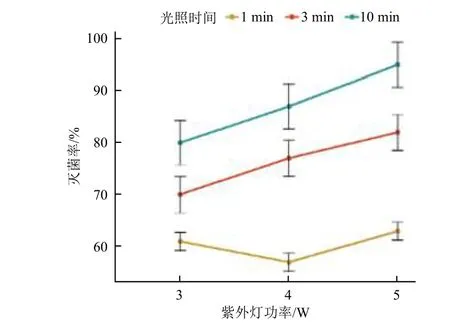
图6 紫外灯功率及光照时间对灭菌率的影响Fig. 6 Effect of UV lamp power and lighting time on sterilization rate
3 样机清除效果验证实验
3.1 快速染菌菌斑的清除效果
在上述参数确定的条件下,使用样机进行菌斑清除,清除前后分别用棉签对表面微生物进行取样,梯度稀释后涂平板计数,以检验清除效果。清除前,使用橡胶与聚氨酯材料在超净台中进行快速染菌腐蚀实验,4 周后从培养箱的自封袋中将带着菌斑的材料取出;然后采用标准涂抹法,用棉签蘸取少许无菌生理盐水涂抹材料平滑表面(按照一定面积),反复涂抹两次,在涂抹时要转动棉签使各部位能均匀沾取微生物;完成后用不锈钢剪去取样人员手持部段,再将棉签投入10 mL 生理盐水中,盖上试管盖,梯度稀释后涂平板计数。菌斑清除后,采用同样方法取样,然后计数。
对清除前后的表面微生物使用平板菌落计数法测量其微生物数量,然后计算清除率,结果如图7 所示。可以看出,样机对橡胶与聚氨酯上的单一芽枝状枝孢霉、黑曲霉、金灰青霉的菌斑清除率和杀菌率均在90%以上。实验证明样机具有良好的菌斑清除、消杀效果。
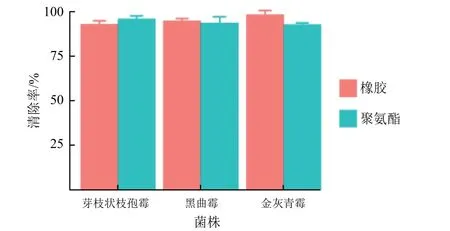
图7 不同材料上菌斑的清除效率Fig. 7 Efficiency of plaque removal on different materials
3.2 实际密闭隔离舱室的菌斑清除效果
利用样机对密闭舱室内灯板上形成的菌斑进行清除。采用标准涂抹法,用棉签蘸取少许无菌生理盐水涂抹清除前后的位置,在涂抹时要转动棉签,使各部位能均匀沾取微生物,梯度稀释后涂平板计数。菌斑清除结果如图8 所示。可见:样机能够有效清除实际形成的菌斑,菌斑清除率为99%,并且物理清除方式不会产生抗逆性。而化学清除方式[24]则不同:尽管消毒后污染水平下降,但某些位置的污染恢复能力可能表明细菌对所用消毒剂具有抵抗力或存在有利于细菌的生长条件(例如湿度)或两者兼而有之。
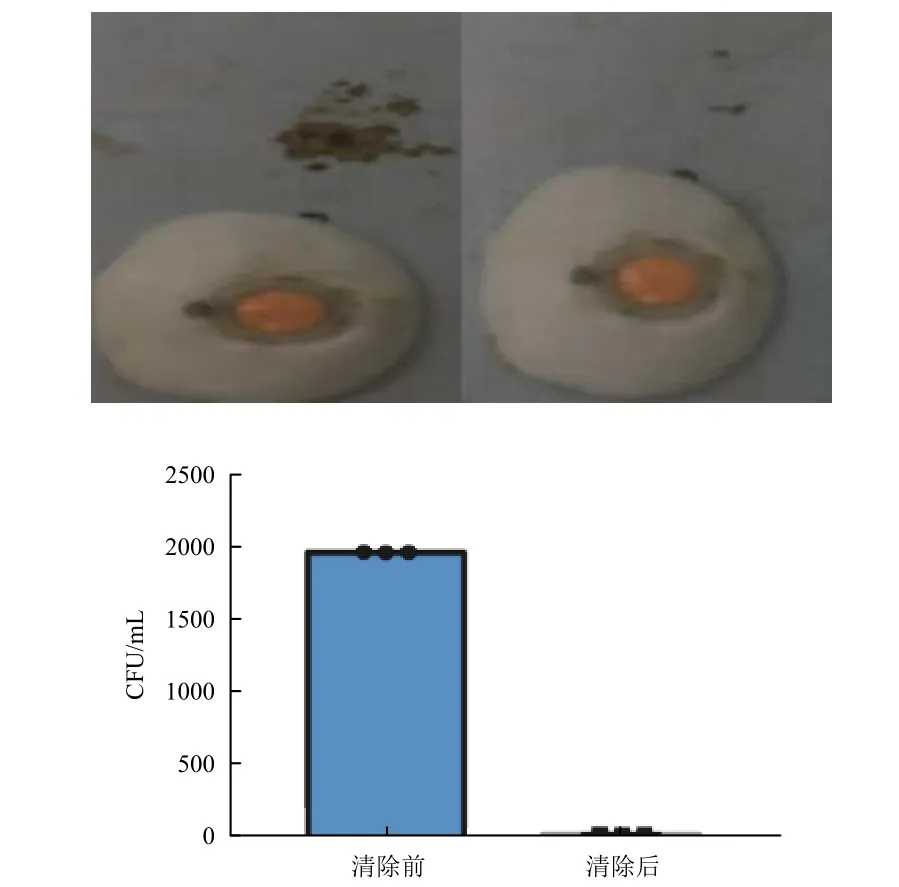
图8 样机清除菌斑前后对比及结果统计Fig. 8 Comparison and statistics of results before and after plaque removal from samples
3.3 材料表面清除前后活死菌染色
自1961 年尤里·加加林的第一次太空飞行以来,在美国和苏联(俄罗斯)航天器内的微生物一直用基于传统上培养的技术进行分析[25],而超过95%的微生物物种不能在常规生长培养基中培养,并且基于培养的技术涉及潜在有害微生物的生长,必须安全处置,因此采用活死菌染色的方法可以直观观察所有活菌和死菌的情况并通过分析软件进行量化。
用组合染料染色(LIVE / DEAD Baclight 细菌生存力试剂盒,分子探针,L13152)研究了吸附在铝合金、橡胶、硅胶、聚氨酯材料表面细菌的分布和生存力。在27 ℃下108cell/mL 细菌悬液中浸泡1 d后,材料用无菌去离子水冲洗,用50 μL 的组合染料染色,然后用奥林巴斯FluoView FV500 共聚焦激光扫描显微镜观测(如图9 所示),使用ImageJ软件对荧光面积进行统计分析。结果表明:铝合金和聚氨酯上菌斑的清除率都为100%,无活菌存在;橡胶和硅胶上菌斑的清除率分别为97.2%和98.0%。
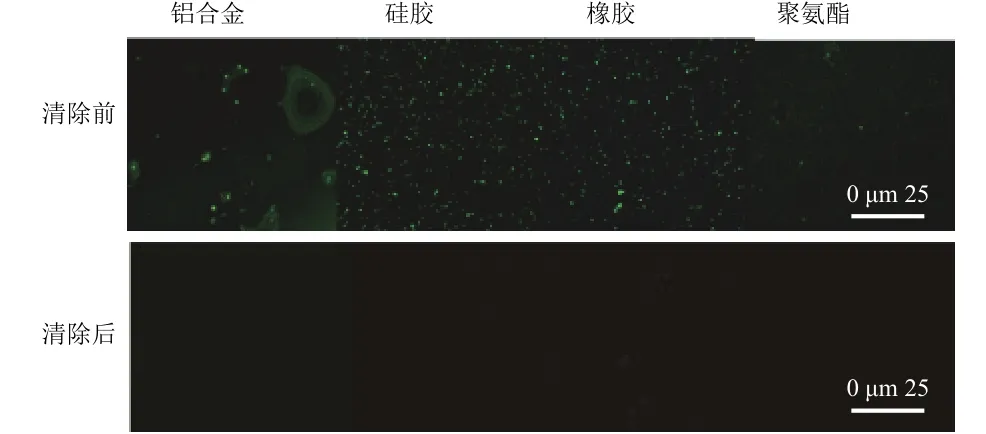
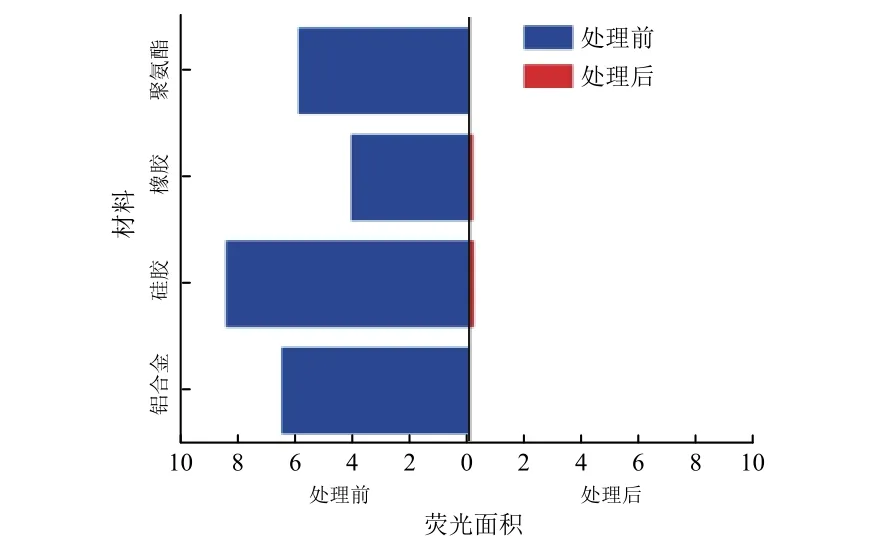
图9 样机清除菌斑前后活/死菌染色激光共聚焦扫描显微镜图及清除前后统计分析Fig. 9 Confocal laser scanning microscopy of live/dead bacteria staining before and after plaque removal
3.4 材料清除前后表面形貌观测
为了观察菌斑清除前后是否对材料表面造成损伤,对非金属材料采用喷金处理,然后使用场发射扫描电子显微镜(FESEM)进行观察,结果如图10 所示。由图可见,清除前后材料表面并没有出现损伤。
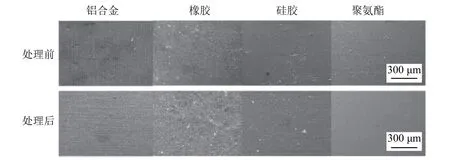
图10 样机清除菌斑前后材料表面扫描电子显微镜图Fig. 10 Scanning electron micrograph of the surface of the material before and after the plaque removal
4 结束语
本文从菌斑清除的潜在应用以及便于航天员操作的角度出发,研制了用于空间站等载人航天器舱内的菌斑清除装置,提出了装置工艺总体方案,对其样机的载荷强度进行了仿真分析,以及风速、紫外LED 灯功率和光照时间参数的优化,并开展了舱内菌斑清除效果实验验证。结果表明:本装置在最优参数条件下对菌斑的清除率和杀灭率高,易操作且对材料表面无损伤,可以较好地解决空间环境中背板和缝隙中的菌蚀斑很难触及的问题,同时能避免使用较多消耗性材料,减轻航天员工作量,可提升我国载人航天器在轨防控微生物污染与腐蚀的能力,间接提升空间站任务效能。
猜你喜欢
国际太空(2022年7期)2022-08-16
国际太空(2022年2期)2022-03-15
航天器工程(2022年1期)2022-02-21
国际太空(2021年11期)2022-01-19
电脑爱好者(2021年18期)2021-09-23
计算机与网络(2018年4期)2018-09-10
中国计算机报(2018年20期)2018-08-28
中外医学研究(2017年6期)2017-03-30
大陆桥视野·下(2016年5期)2016-07-05
中国现代医生(2014年18期)2014-09-12
