
基于UWB与光束控制的物品定位指向系统
2022-01-05 03:34:10何志毅
桂林电子科技大学学报 2021年4期
李 祥, 何志毅,, 何 宁
(1.桂林电子科技大学 信息与通信学院,广西 桂林 541004;2.桂林电子科技大学 广西无线宽带通信与信号处理重点实验室,广西 桂林 541004)
随着商业的繁荣发展,对于位置信息需求不断增加。例如在商品仓储式陈列的超市,顾客自行寻找商品比较盲目,经常需要人工指引,从而增加了超市经营的人工成本。在仓储管理中,人工通过货架等信息寻物,需要查询对照货物和货架编号,费时费力。在电子商务、快递物流量庞大的时候,货物定位和查找效率较难满足实际需求[1]。如果能够在实现室内物品定位的同时,为定位点提供更加直观的指向,将会提高寻找物品的效率。
近年来,室内定位技术获得了快速发展,出现了许多实用的技术[2],其中超宽带(ultra-wideband,简称UWB)定位技术[3]、WLAN定位技术[4]、红外线定位技术、超声波定位技术[5]以及RFID定位技术等[6],被广泛应用于工业领域。表1为各类定位技术特点及其比较,从表1中可见,UWB定位技术具有定位精度高、覆盖范围广、抗干扰能力强等诸多优势[7],适用于复杂环境中的定位需求,已成为目前最具潜力的室内定位技术[8]。
室内物品定位技术已有较多应用研究,文献[9-10]分别将RFID与iBeacon低功耗蓝牙技术应用于仓储物资定位与管理中,实现了数据自动采集与货物定位,有效提高了仓储管理效率。文献[11]将UWB技术应用于危化物堆垛无距测量与监测,改善了危化物品的定位精度。但对于定位后的物品寻找问题,目前尚未提出相应的优化解决方案,还需要依靠传统的方式,根据特定标记号进行指向,如货架号等方式。文献[12]将UWB定位技术应用于舞台自动追光,实现了较高精度的位置指向,验证了光束控制技术应用于位置指向的可行性,但采用接收信号到达时间差(time different of arrival,简称TDOA)的测量方式,定位精度在0.2 m左右,商品密集的超市等场景需要更高定位精度,此方案并不适用。
鉴于此,提出了一种实用的定位指向系统的设计方案。其采用对称双边双向测距(symmetric double-sided two-way ranging,简称SDS-TWR)的测量方式,可获得更高的定位精度,定位后的位置指示清晰,有助于快速地寻找目标。借助成熟的光机电一体化舞台光束灯,简化硬件设计,可提供直观的目标指向。光束灯是一种基于DMX512协议的数字电脑灯,可通过协议编码对光束的二维方向进行控制,兼具使用便捷、控制精确和性价比高的特点,可应用于特定位置物品指向。
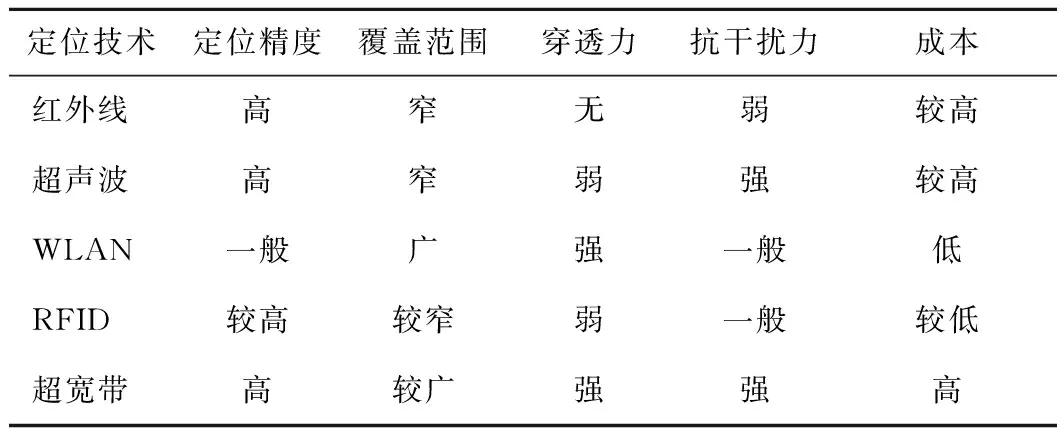
表1 常用定位技术特点对比
1 设计方案与关键技术
1.1 系统设计
系统主要包括UWB超宽带定位模块、PC上位机控制台、STM32下位机、光束灯4个部分。超宽带定位模块由4块搭载DWM1000芯片的定位模块构成,其中3块作为基站,1块作为信标。将信标与所需存放的物品固定在一起,物品存放完后,将信标与各个基站的距离数据通过基站0发送至上位机,以基站0作为坐标原点,通过三边定位算法得出物品的x、y坐标值并保存。光束灯与基站0所处坐标相同,当需要查找该物品时,上位机将坐标值转换为光束灯垂直偏转角度与水平偏转角度,通过串口发送至STM32下位机,进行DMX512协议编码,经RS485电路输出到光束灯,进行指向控制。图1为定位指向系统架构。

图1 定位指向系统架构
1.2 UWB定位原理
UWB定位技术是根据基站与标签的相对位置信息,通过求解相关数学模型实现定位[13]。获得相对位置主要有接收信号到达时间差(TDOA)与接收信号到达时间(time of arrival,简称TOA)2种测量技术,TDOA测量技术需要定位系统各个基站间达到严格的时间同步,实现难度较大,且坐标求解算法较为复杂[14]。实际应用中常采用TOA测量技术,通过计算无线信号从发送端到接收端的传输时间,结合电磁波传播速度得到设备间的距离[15]。
TOA模型SDS-TWR法具有较高的定位精度,其原理如图2所示。
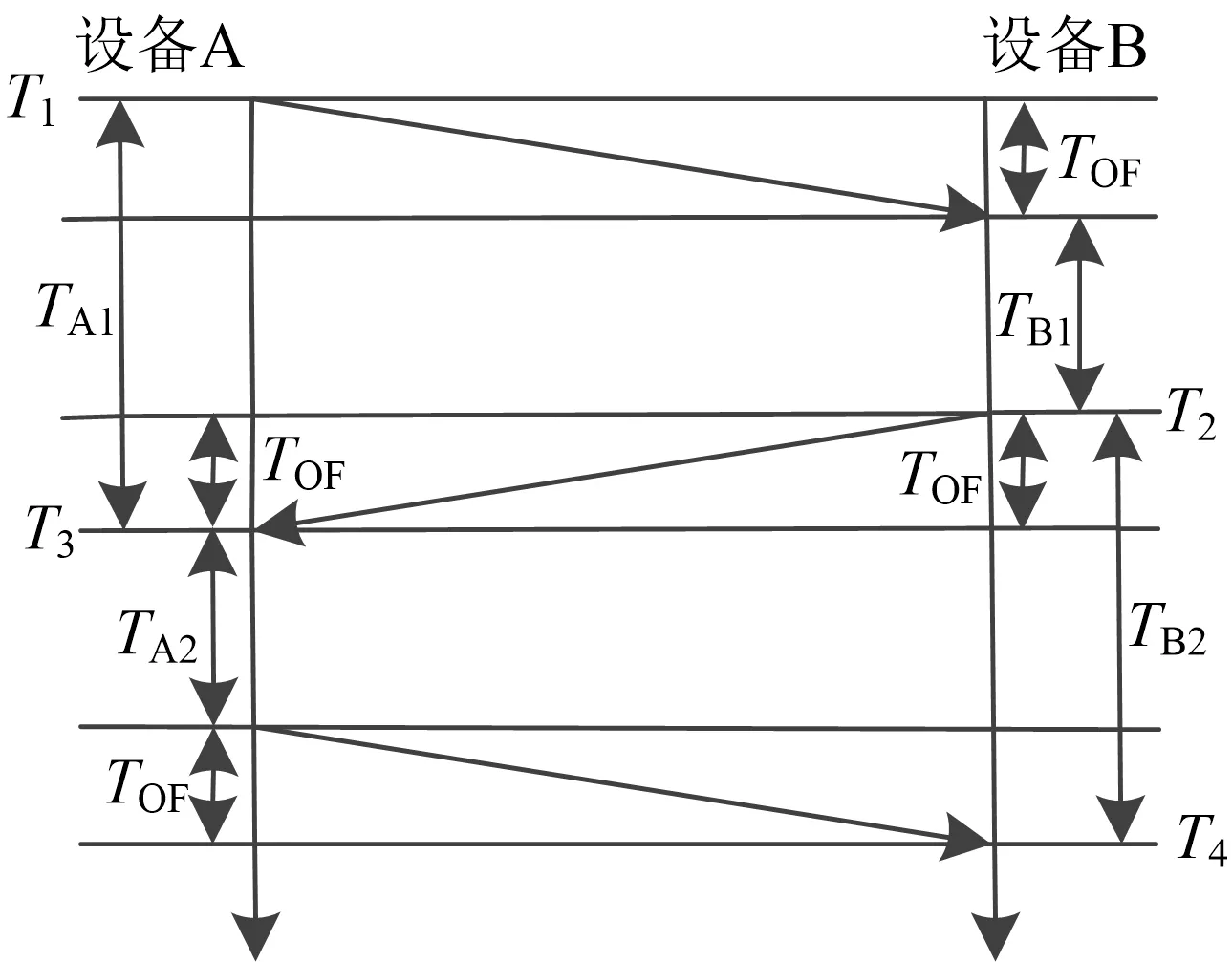
图2 SDS-TWR测距原理
首先,设备A在时间点T1时通过超宽带天线向设备B发送脉冲,设备B在接收到A发送的脉冲后延时TB1后,向设备A发送脉冲,此时记为时间点T2;设备A在时间点T3接收到来自设备B的脉冲后延时TA2后,又向设备B回复脉冲信号,并将设备B接收到最后一次A发送的脉冲时间点记为T4,到此一次完整的SDS-TWR测距完成。将T3-T1记为TA1,T4-T2记为TB2。由此可以计算出无线脉冲的飞行时间TOF:
2TOF=TA1-TB1,
(1)
2TOF=TB2-TA2。
(2)
将式(1)与式(2)相加可得:

(3)
由于不同时钟晶振之间存在着频率偏差,假设设备A的晶振漂移为Δt1,设备B的晶振漂移为Δt2,则考虑误差后的飞行时间为
(TB2-TB1)(1+Δt2)],
(4)
将式(4)减去式(3)可得飞行时间误差值
(5)
TA2与TB1的取值相等,只存在由时钟偏差所产生的误差值。当延时发送时间远大于信号飞行时间TOF时,可近似认为TA1-TA2、TB2-TB1的值与2TOF的值相等。由时钟漂移产生的时钟频率偏差并不会随着设备发送数据延长时间TA2、TB1的增加而增大。因此,通过这种方法可有效减小时钟漂移等偏差造成的测量误差,从而提高飞行时间的测量精度。将测量的飞行时间乘以飞行速度(近似为光速c=3×108m/s),可得到2个设备之间的距离[16]
D=c×TOF。
(6)
1.3 三边定位法
TOA的定位系统常采用三边定位的方法,通过信标与基站间的距离,计算得到位置坐标[17-19]。在三边定位法中,首先需要在定位区域确定3个坐标位置已知的基点,将3个带有DW1000模块的基站放在基点上,用于接收来自标签的脉冲信息。图3为三边测量定位原理图。
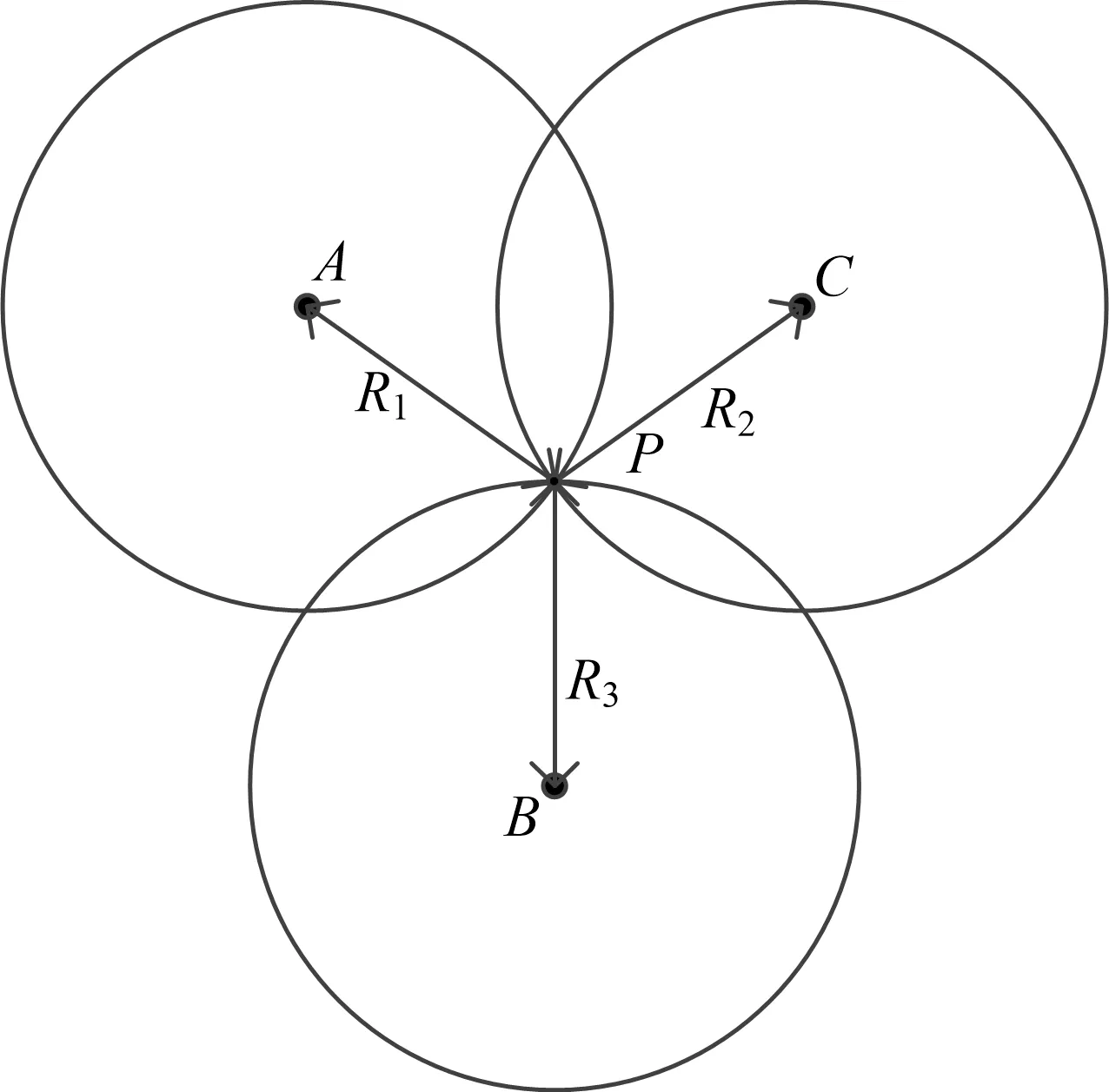
图3 三边测量定位原理
在图3中,已知3个点A(x1,y1)、B(x2,y2)、C(x3,y3)的位置。未知点P(x,y)到3个已知点A、B、C的距离已知, 分别为d1、d2、d3。分别以A、B、C为圆心,以d1、d2、d3为半径作3个圆,根据毕达哥拉斯定理可知,3个圆的交点即为未知点的位置[20],可表达为
(7)
采用最小二乘法对式(7)进行求解,将式中第2项与第3项分别与第1项相减,移项后转为矩阵形式:
(8)
将式(8)表示为HX=b,考虑存在误差,可得到误差向量模型ε=b-HX。为了计算并解出最小误差解,令
f(X)=(HX-b)T(HX-b),
(9)
对式(9)求导,可得
X=(>HTH)-1HTb。
(10)
由此,通过SDS-TWR测距得出标签与基站间距离,采用三边定位算法建立数学模型,使用最小二乘法求得方程组最优解,最终得到标签的坐标。
1.4 DMX512协议
DMX512协议是一种异步串行传输协议,常用于光束灯的数字控制。该协议的数据传输速率为250 kbit/s,数据更新率达44 帧/s,每个数据帧包含的通道数据最多可达512个,每个通道数取值范围为0~255[21]。其中一个完整的数据帧如图4所示,主要包括MTBP位、BREAK位、MAB位、SC位以及512个数据通道帧,每个数据帧又由1个START位、8个数据位、2个停止位组成。其中MTBP位高电平,表示上一帧数据传输结束,此时处于空闲状态。BREAK位为起始位,其周期必须大于88 μs。SC位为第1个数据通道帧,表示数据0x00。为了区分BREAK与SC位,在其中间添加一段高电平脉冲MAB[22],达到分离作用。

图4 数据帧时序
表2给出了灯具的11个控制通道定义,可对其X轴偏转角度、Y轴偏转角度、颜色、亮度等信息进行控制。
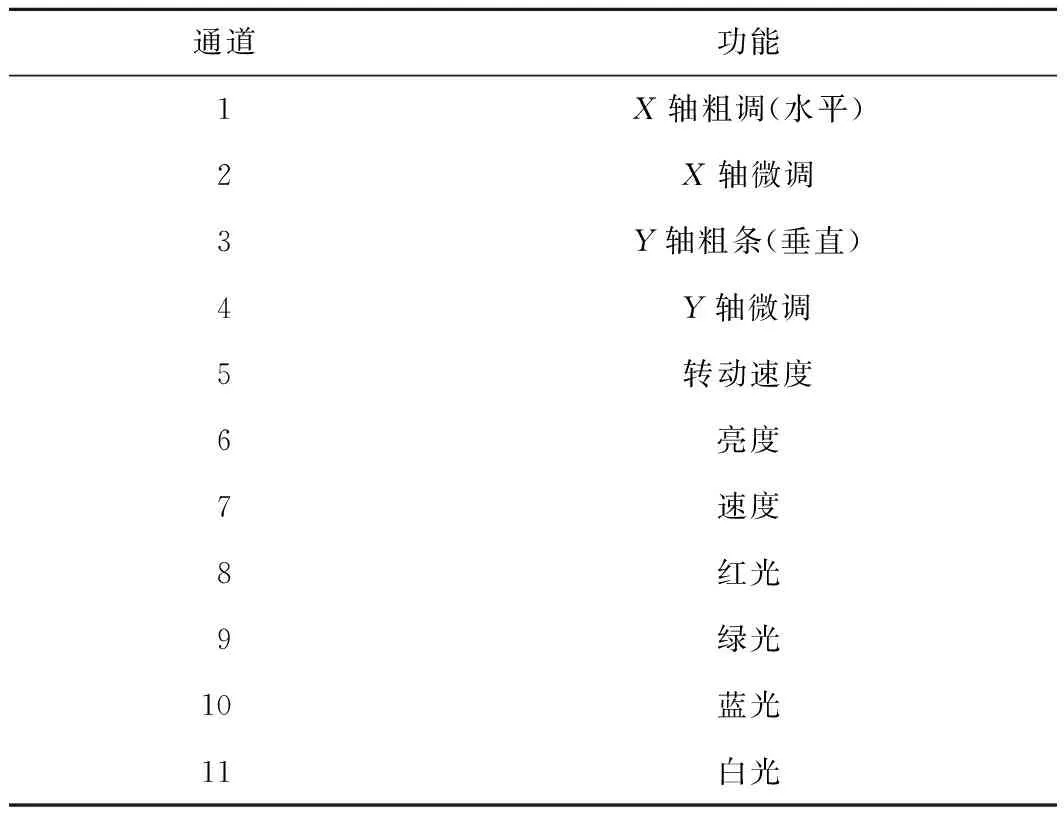
表2 通道功能定义
1.5 光束指向算法
图5为灯具的三维坐标系。光束灯的方向控制是在以灯具为圆心的一个直角坐标系中实现的,需要指向时,将二维坐标转换为二维的控制偏转角度。光束灯放在距离地面z米高的地方,坐标为(0,0,z),3个基站z坐标轴固定,分别按G0(0,0,0)、G1(5,0,0)、G2(2.5,2.5,0)位置固定,坐标单位为m,信标G的坐标可记为(x,y)。
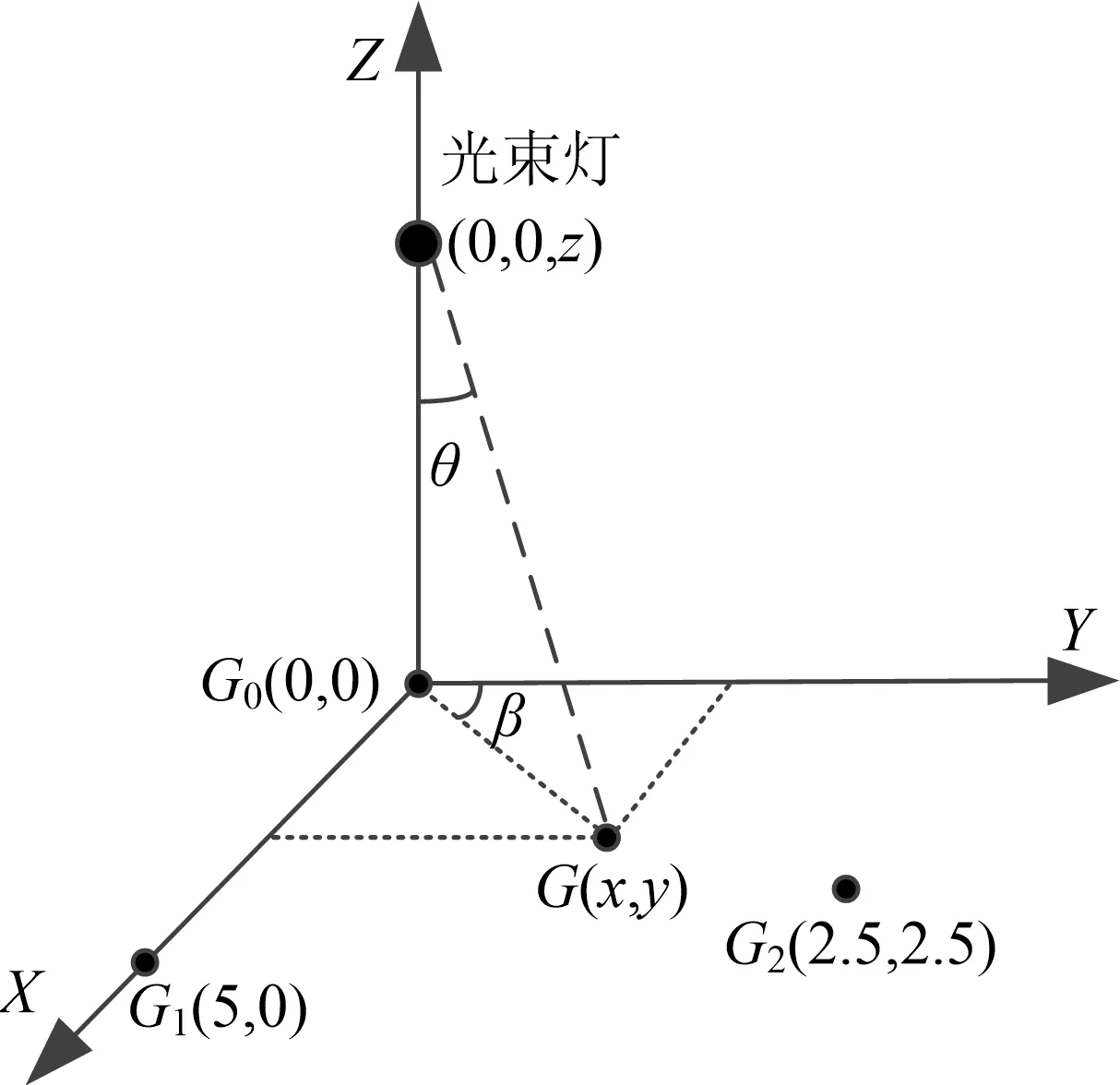
图5 光束灯三维坐标系
由正切三角函数的反函数可得:
(11)
(12)
由此,可通过UWB定位模块将获得的坐标信息转换为水平偏转角度与垂直偏转角度。光束灯的方向采用8 bit数据进行控制,需要将计算得到的角度转换为相对应的数值,最终完成光束灯的定点指向。转换公式如下:
X=27.05θ,
(13)
Y=122-65.57β。
(14)
2 实验结果与分析
2.1 实验环境
在长宽各为5 m的范围内进行实验数据采集。以基站0作为三维坐标的原点O,光束灯放在距离地面3.3 m的高处,坐标为(0,0,3.3),则基站0坐标为(0,0,0)、基站1坐标为(0,5,0)、基站2坐标为(2.5,2.5,0),其中坐标单位为m。将基站0通过数据线与电脑相连,进行数据通信,同时将上位机串口与STM32下位机相连,经RS485模块连接至光束灯。图6为实验环境。

图6 实验环境
2.2 UWB定位实验
预先设置好基站坐标,打开串口,接收来自基站0发送的信标与各基站的距离数据,通过三边定位算法可得到信标的二维坐标数据。图7为MFC上位机定位模块设置界面。
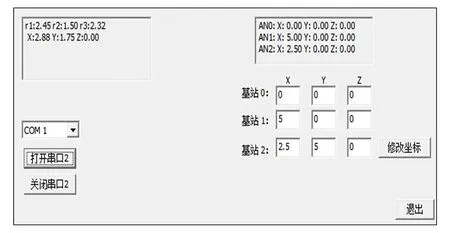
图7 定位基站设置界面
根据实际现场测试,得到20组UWB定位信息,计算的位置数据与实地测量的位置数据在X轴与Y轴的误差,如图8所示。
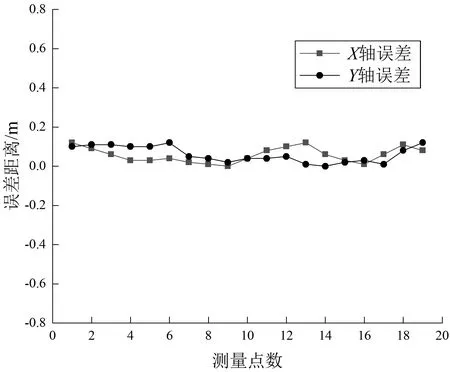
图8 UWB定位误差
采用均方根误差进行定位精度评估,对于X坐标有
(15)
同理,对于Y坐标有
(16)
对于二维定位精度有
(17)
由此可知,UWB定位模块在X坐标的最大定位误差为0.12 m,最小误差为0 m,均方根误差约为0.057 m,在Y坐标的最大定位误差为0.12 m,最小误差为0 m,均方根误差约为0.061 m,二维均方根误差约为0.091 m。实验结果表明,UWB定位模块的定位精度较高,基本达到了预期,能够在仓储货物定位等应用中获取准确的物品位置信息,满足光束指向对于定位精度的需求。
2.3 光束指向实验
获取信标的二维坐标后,在上位机中通过光束指向算法将二维坐标值转换为光束灯控制数据,发送至STM32下位机来实现指向控制。以测量信标点到光束边缘的距离作为指向误差值,当光束与信标点重合时,认为误差值为零。经过多次测量,误差如图9所示。
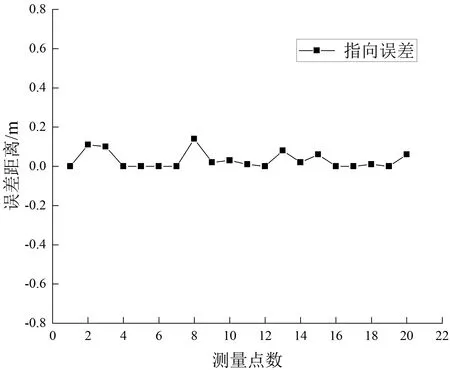
图9 光束灯指向误差
同样采用均方根误差公式对指向精度进行评估,可得
(18)
光束灯指向的最大误差值为0.14 m,最小误差值为0,均方根误差值约为0.032 m。由于光束的光斑具有一定面积,对于定位误差具有容错度,在定位存在较小误差时,依旧能准确指向物品位置。实验数据表明,指向模块精度基本到达预期,在误差为0.14 m时,也基本不会影响物品判别,能够满足取货时的指向需求。
2.4 物品存放实验
MFC上位机中可实现对货物的增、删、改、查等功能,将信标放在测量范围内某点来模拟物品存放的场景,在货物管理界面选择库存添加,系统会将此时信标坐标与物品信息一同保存。当需要提取货物时,选择需要提取的货物,系统将会控制光束灯指向该位置。图10为库存添加界面。
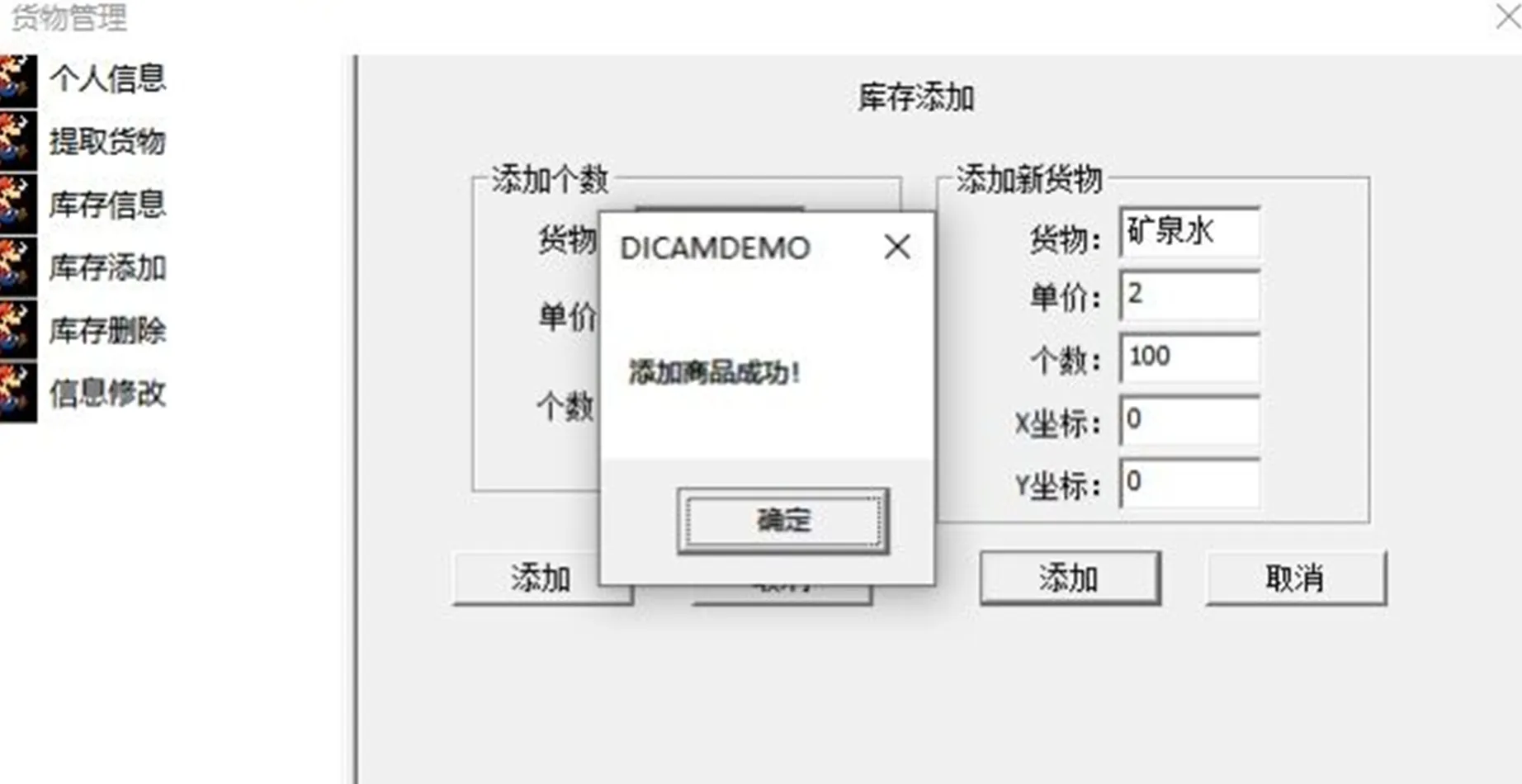
图10 库存添加界面
传统人工寻物通常通过特定标注,如货架编号来进行查找,为验证光束指向对物品寻找效率的提升幅度,将传统寻物与光束指向寻找进行实验对比,将定位区域划分为10×10的方格,用贴纸对行、列编号进行标注,每个小方格模拟一个储物柜。通过定位模块采集每个储物柜的位置坐标,并保存为特定商品。分别采用光束灯与货架编号2种指向方式寻找物品,统计从点击“提取货物”到信号抵达存储物柜的时间。为保证数据可靠,先采用光束指向进行随机实验,避免因不熟悉环境而造成传统寻物时间延长。图11为储物柜模拟结构。
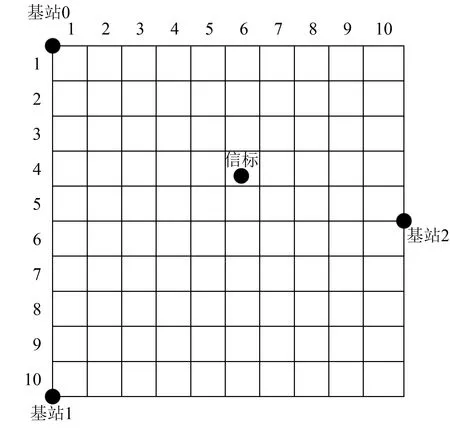
图11 储物柜模拟结构
对采用传统方式与光束指向方式寻找储物柜的耗时分别进行统计,结果表明,传统方式平均耗时约为5.98 s,28次寻物总耗时为161.34 s;而采用光束指向方式时,平均耗时约2.87 s,总耗时为77.5 s。实验结果表明,光束指向寻物相比传统方式,耗时减少一半多,具备更高的寻找效率。图12给出了2种方法的耗时统计结果。
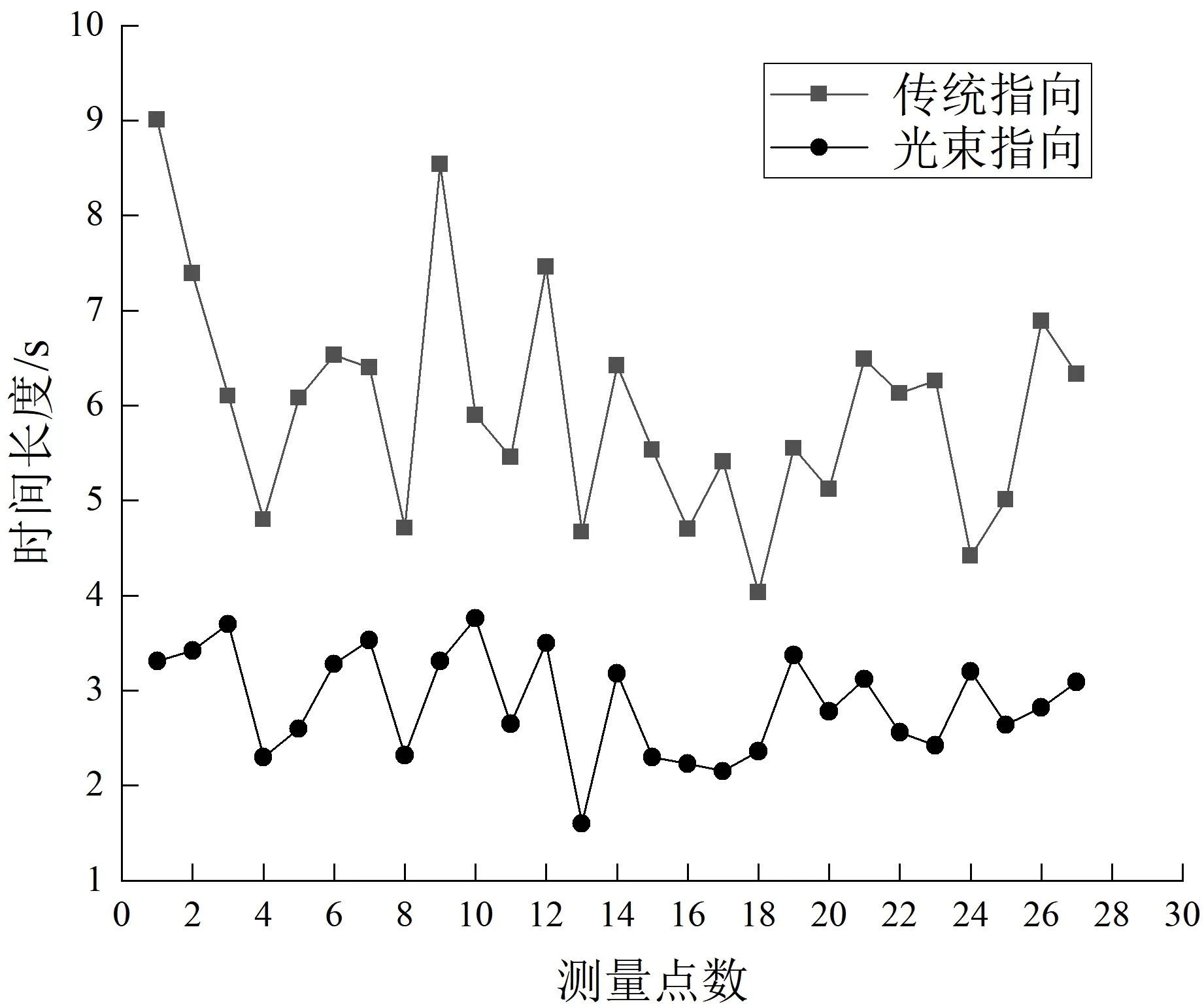
图12 寻物耗时统计
3 结束语
针对目前室内仓储等环境物品定位后,采用传统人工通过货架号指向方式寻物效率低的问题,提出了一种更加直观和高效的光束指向解决方案。基于SDS-TWR测量方式的UWB定位技术获取物品准确位置,通过光束灯指向算法控制光束精确指向物品,可视化物品位置信息。经过实验测试,系统定位精度在0.12 m以内,指向精度在0.14 m以内,满足正常寻物的使用需要。与传统特定标记号指向相比,采用光束指向的定位系统可以减少大量人工寻物时间,提高寻找效率,验证了系统的可行性。考虑实验环境较为空旷,在布局复杂的仓储环境中,可采用多灯放置在不同位置同时指向,避免环境障碍物遮挡光束。
猜你喜欢
激光技术(2024年1期)2024-04-03 12:09:02
军事文摘(2023年4期)2023-04-05 13:57:35
奥秘(2021年3期)2021-04-12 15:10:26
智富时代(2019年4期)2019-06-01 07:35:00
测控技术(2018年4期)2018-11-25 09:47:22
铁道通信信号(2018年3期)2018-04-19 02:32:56
光学精密工程(2016年6期)2016-11-07 09:08:16
长春理工大学学报(自然科学版)(2015年4期)2015-12-07 06:57:06
红领巾·探索(2014年1期)2015-03-16 16:35:14
水道港口(2015年1期)2015-02-06 01:25:45
