低慢小目标复合拦截任务规划仿真分析*
2021-12-29 07:30:36卞伟伟吕鑫刘蝉贾彦翔邱旭阳
现代防御技术 2021年5期
卞伟伟,吕鑫,刘蝉,贾彦翔,邱旭阳
(北京机械设备研究所,北京 100854)
0 引言
为了有效应对低空、慢速、小型无人机带来的威胁,装备可靠的主动防范系统成为各国军方和安防企业关注的焦点[1-3]。目前,用于低慢小目标拦截的手段主要有激光烧蚀毁伤、无线电干扰诱骗、柔性网拦截等。其中,无线电干扰的拦截手段作用力强,成功率相对较高,但易影响其他正常的社会民生活动,并且由于无人机预先设定的程序模式不同,会出现坠落、悬停或返航等不同后果;激光烧蚀毁伤武器易受限于大雾、大雨、尘霾等外界环境的影响,同时,在城市环境下使用时,不宜使用激光进行烧蚀毁伤;柔性网拦截虽能对目标实施较高精度的防二次毁伤处置拦截,但受限于发射动能限制,其拦截范围相对较小。这些拦截手段在防范距离、能效目标、场景/环境适应性、多目标处置等方面性能不一、各有所长,尚难有效可靠地解决典型防控场景下无人机类目标的处置拦截问题[4-6]。可见,面对不同的使用场景与环境约束,单一的拦截手段无法满足目标防控需求,需要研究多种拦截装备协同合作的途径,以增强系统的防控效能[7]。
低慢小目标袭扰事件一般具有突发性,从发现目标到处置拦截的时间较短,对指挥决策的时效性和拦截策略的精确度都提出了很高的要求。传统拦截决策依靠人为控制的方式无法在有限的时间内给出多种拦截装备的任务规划方案,需要研制自动化的指挥决策技术,实现多种拦截手段的有效协同,发挥出系统使用效能,实现对目标的复合拦截。
多体制装备的复合拦截任务规划,属于典型的非线性规划问题,其问题要素及规模以几何级关系决定了其解空间的大小。为了有效地解决复合拦截任务规划问题,需要将动态和静态结合起来研究。枚举法与动态规划法等比较常用的算法,数学逻辑上虽然易于实现,但程序编写繁杂,计算资源要求高,同等条件下算法收敛过程持续时间过长,适用解决的任务分配问题有限[8]。随着智能技术的飞速发展,蚁群、遗传等进化算法被引入于求解拦截任务规划问题,但面对复杂场景,进化算法也难以保证求解精度与时间性能的匹配[9-10]。
本文针对低慢小目标的多体制处置手段的复合拦截任务规划问题,研究引入一种改进的种群控制方法,编辑拦截效能可行域的编码,缩小复合装备的拦截性能与目标距离、航迹和飞行速度等要素构建的非线性规划解空间,对规划算法的主要影响参数进行分析,避免算法早熟,将合适的拦截装备分配给那些满足拦截条件的目标,以提高复合拦截任务规划算法的性能。
1 问题描述
1.1 效能函数
低慢小目标的多体制处置手段的复合拦截任务规划问题,主要是对诸如激光烧蚀毁伤、无线电干扰诱骗、柔性网拦截等异构处置手段的协同任务进行规划,充分协调利用各资源的效能,以期通过多体制处置手段进行复合拦截以及时有效地对目标进行处置。为定量描述拦截装备拦截任务分配问题,需要综合考虑来袭低慢小目标的威胁程度、拦截装备的处置拦截能力,下面讨论求解拦截效能最佳的复合拦截任务规划策略。
假设拦截装备有nM个,拦截装备集合表示为
UM={M1,M2,…,MnM}.
(1)
来袭目标有nT个,且其集合表示为
UT={T1,T2,…,TnT}.
(2)
设Pij代表第i个拦截装备对第j个目标的拦截概率,Pij=0时表示拦截装备不能对相应的目标实施处置拦截,Pij=1时表示拦截装备能对相应的目标实施有效的拦截。则拦截装备对目标的处置拦截性能矩阵可表示为
(3)
设Si为第i个拦截装备拟处置拦截的目标序号,拦截装备拦截任务规划方案描述为
S={S1,S2,…,SnM}.
(4)
定义决策变量如下:当且仅当Si=j(表示第i个拦截装备处置第j个目标)时,决策变量dij=1,否则dij=0。
定义目标的威胁系数为WT,表征来袭目标对防控区域的威胁权重:
WT={w1,w2,…,wnT}.
(5)
定义复合拦截效能函数为使拦截装备对所有目标处置拦截概率之和为最大:
(6)
1.2 约束条件
考虑上述处置手段的任务适应性,低慢小目标多体制处置手段的复合拦截任务规划可转化为一个受约束的优化问题,约束条件归纳如下:
(1) 拦截装备与目标配对的0-1规划问题[11],对于处置拦截低慢小目标的激光烧蚀毁伤、电子干扰诱骗、柔性网拦截等装备来说,处于工作模式下时,每个拦截装备Mi每次仅能处置拦截一个目标Tj:
(7)
式中:i=1,2,…,nM,j=1,2,…,nT,k=1,2,…,nT。
(2) 分配给激光、电子干扰诱骗、柔性网等拦截装备Mi的目标必须在其拦截能力范围内,且有
pij>0,(dij=1).
(8)
以式(6)作为目标函数,式(7),(8)为约束条件,即构成了复合拦截任务规划数学模型。
2 粒子群优化算法
2.1 粒子群算法
规定nD维解空间中存在n个不同变量的粒子x=(x1,x2,…,xnD),对应的第m个粒子为xm=(xm1,xm2,…,xmnD),其位置为pm=(pm1,pm2,…,pmnD),速度为vm=(vm1,vm2,…,vmnD),种群全局最优粒子为pg=(pg1,pg2,…,pgnD)。
设l为粒子进化代数,则粒子群优化进化如下:
(9)
式中:变量b=1,2,…,nM为拦截装备维数;随机数r1,r2在[0,1]区间内均匀分布;学习因子c1,c2分别是粒子的自我认知和群体协同能力,w为粒子惯性权重。
设定粒子速度及位置约束如下:
(10)
(11)
在进化算法更新过程中,为保证进化算法结构保持连续粒子位置和速度更新中的迭代运算,采用直接离散化的方法以满足获取整数配对的需要,可通过对式(10),(11)中的粒子位置进行取整,并通过粒子对应的目标函数来评价此解的质量。
第l代的惯性权重系数更新的策略为
w=wini+(wend-wini)·l/lmax,
(12)
式中:wini,wend分别为对粒子群算法进化起始代到终止代惯性权重的限制;lmax为总进化代数。
2.2 改进的粒子群算法

(13)

如图1所示,为了缩小任务规划的映射空间,提升算法迭代速度,基于拦截效能可行域进行编码。
图1 粒子编码Fig.1 Particle coding process

在群体数量不变的情况下,样本浓度随着搜索空间的增大而降低。为控制算法的搜索过程,以增强群体的覆盖范围,定义第l代群体的样本浓度为1/ρl,并引进度量公式为
(14)

为了避免算法发生早熟从而陷入局部最优,通过浓度允许值改变粒子群的收缩与扩展运动,以增大群体聚集时的样本空间,具体策略如下:
(1) 当ρl<ρmin时,可采用速度更新策略如下:
(15)
(2) 当ρl>ρmin时,采用式(10),(11)更新策略。
3 仿真分析

由表1可知,序号为2,3,6和7的武器可拦截第1个目标,序号为1,3,4,7和8的武器可拦截第2个目标,序号为1,4,6和9的武器拦截可第3个目标,序号为2,5,6和8的武器可拦截第4个目标,序号为2,3,5,7和9的武器可拦截第5个目标,序号为1,6和8的武器可拦截第6个目标,序号为2,4,5和7的武器可拦截第7个目标。
表1 拦截武器-目标毁伤概率Table 1 Weapon-target damage probability %
当学习因子设置为c1=c2=2时,计算得到全局最优粒子为Pg=(1,3,1,3,3,3,1,3,1),复合拦截分配方案为S=(2,5,1,7,7,4,1,6,3),复合拦截概率为f=87.17%,其复合拦截任务规划方案如表2所示。

表2 不同学习因子对应的任务规划方案Table 2 Assignment schemes with different learning factors
由表3可知,威胁值大的目标期望的拦截概率越大,由于第1和第7个目标的威胁值较高,所以分配了较多的武器:第1个目标由第3,7个武器复合拦截;第7个目标由第4,5个武器复合拦截,规划结果符合实际作战情况。
表3 任务规划方案Table 3 Weapon-target assignment scheme
由图2,3可知,采用新的粒子编码策略,缩小了规划任务问题的解空间的同时,效能函数具有更快的收敛速度,迭代过程具有全局寻优能力。

图2 复合拦截效能Fig.2 Composite interception efficiency with different c1 & c2
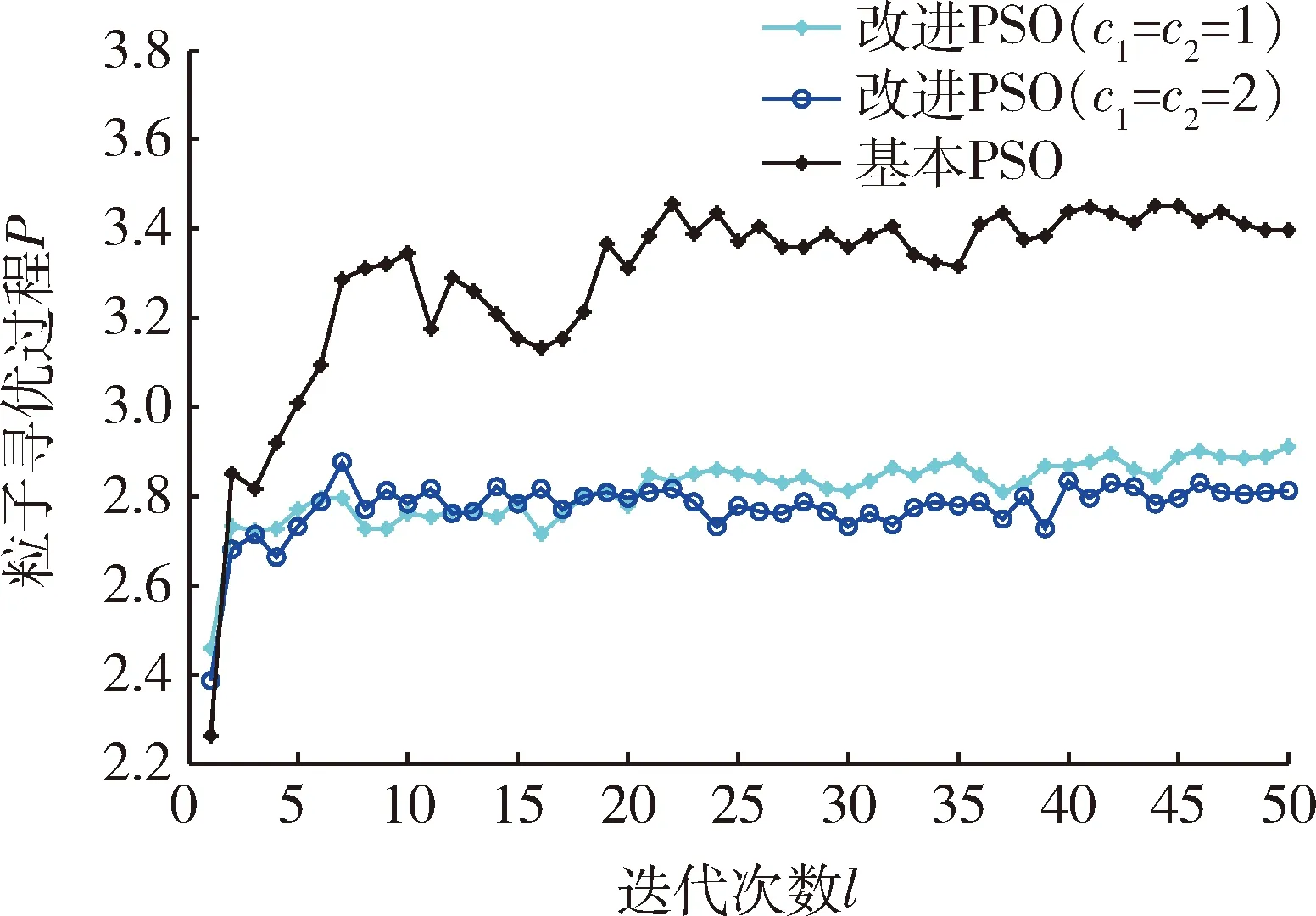
图3 粒子群寻优过程Fig.3 Particle swarm optimization process with different c1 & c2
通常而言,学习因子的取值越大,代表粒子的学习能力就越强,而对粒子群算法的影响相对较小。不失一般性,学习因子取值c1=c2=2。表4为不同种群规模对应的进化算法计算时间。

表4 不同群体规模对应的程序运算时间Table 4 Assignment schemes with different group size
由表4可见,随着种群规模的增大,程序运算时间易随之增长,这是由于算法计算的空间复杂度增加了。效能函数与粒子群寻优过程见图4,5。
由图4,5可见,随着粒子数种群规模的增大,算法收敛速度变快;如果种群规模较小,算法的收敛速度也将随之变小,同时算法的收敛精度也相对较低。种群规模可根据问题的复杂程度尝试取值。

图4 不同种群规模对应的复合拦截效能Fig.4 Composite interception efficiency with different N
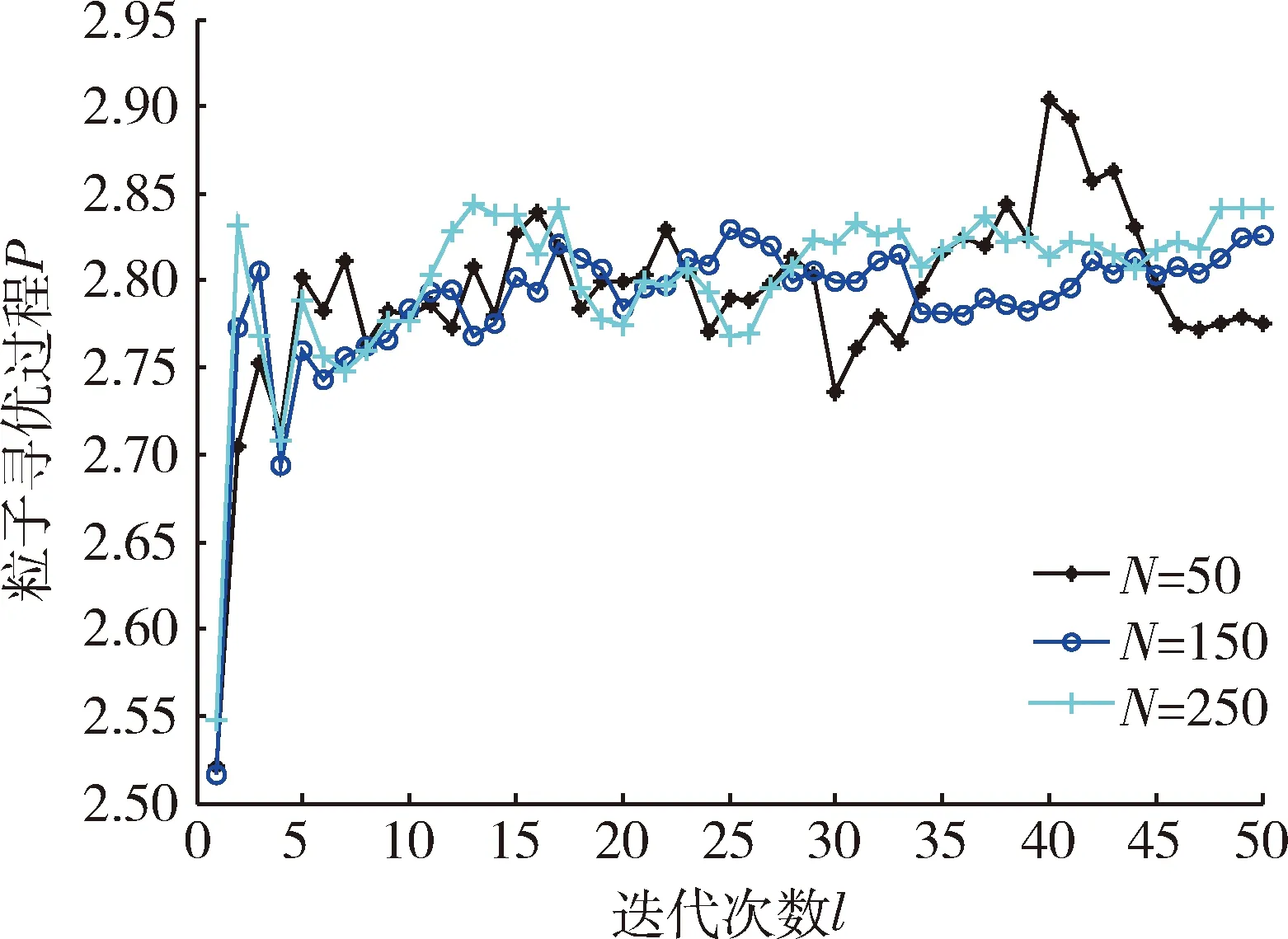
图5 不同种群规模对应的粒子群寻优过程Fig.5 Particle swarm optimization process with different N
表5给出了不同惯性权重所对应的任务规划方案,图6,7为不同惯性权重所对应的效能函数变化情况与粒子群寻优过程。

表5 不同惯性权重对应的任务规划方案Table 5 Assignment schemes with different w
由图6,7可见,随着惯性权重的增大,粒子收敛速度变快,说明其继承当前速度的程度相对较大,其局部的搜索能力也相对较强;反言之,惯性权重取值较小时,粒子的全局搜索能力相对较强,局部搜索能力变弱。本文后续算法中,惯性权重采用线性递减法取值,且wmax=0.9,wmin=0.4,wt=wmax-t(wmax-wmin)/tmax。
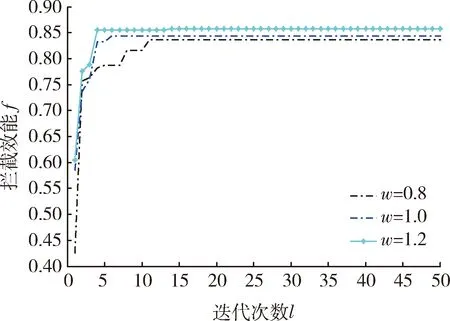
图6 不同惯性权重对应的复合拦截效能Fig.6 Composite interception efficiency with different w
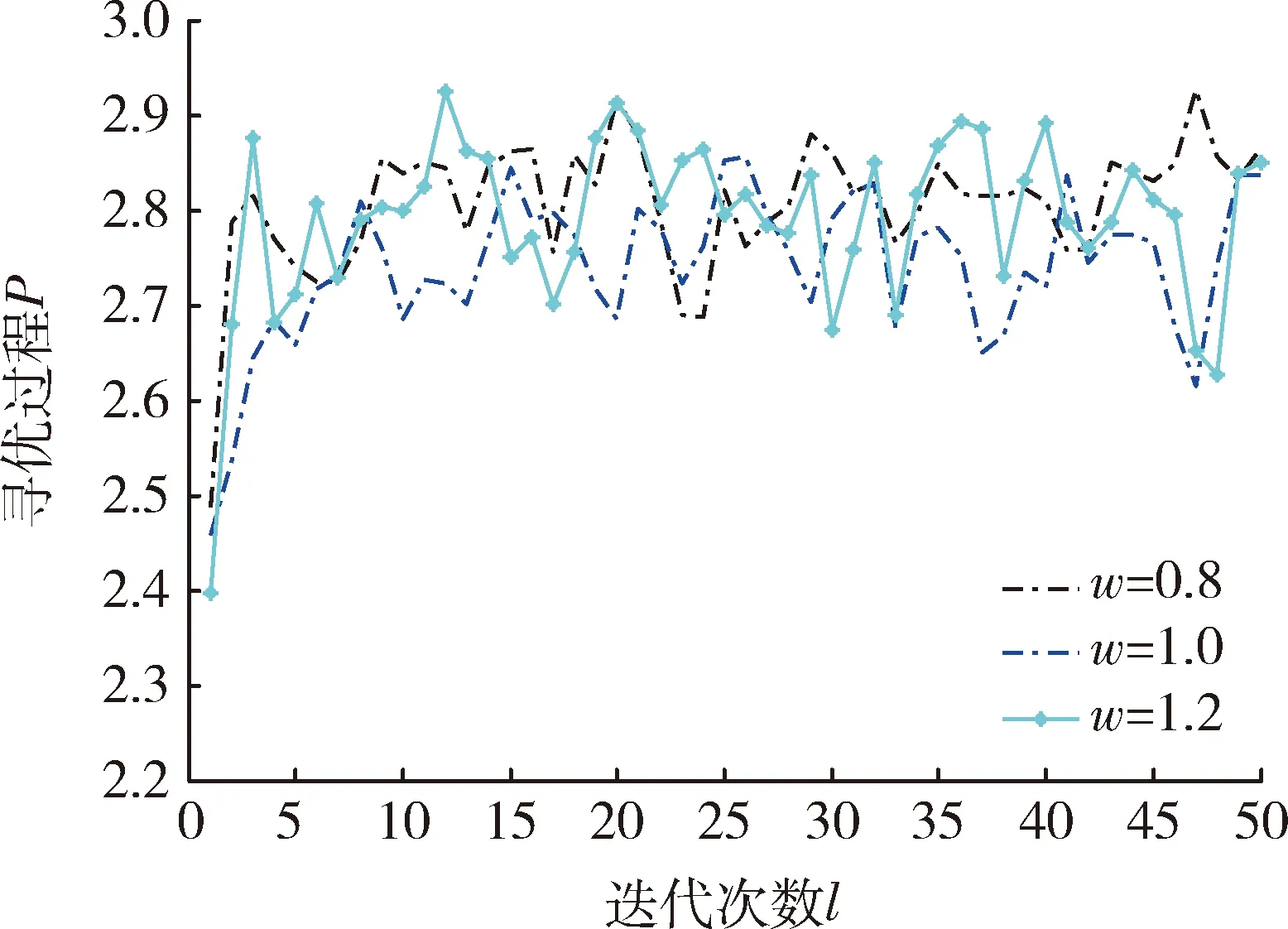
图7 不同惯性权重对应的粒子群寻优过程Fig.7 Particle swarm optimization process with different w
4 结束语
低慢小目标区域协同防控过程多体制拦截装备复合拦截任务规划是一个非常典型的多约束条件下的0-1整数规划问题,其目的是尽可能发挥系统的最大防控作战效能。本文研究引入了一种基于常见拦截装备拦截效能可行域的粒子编码方法,以缩小规划问题的解空间,加快粒子寻优过程的搜索速度,避免了算法早熟现象,获得更高效的全局寻优能力的同时摆脱局部最优限制,对于低慢小目标协同防控过程多体制拦截装备复合拦截的任务规划可提供一定的参考。
猜你喜欢
中学生数理化·八年级物理人教版(2023年3期)2023-03-21 00:40:16
今日农业(2022年15期)2022-09-20 06:54:16
中学生数理化·中考版(2022年8期)2022-06-14 06:55:54
中学生数理化·八年级物理人教版(2022年3期)2022-03-16 05:55:06
中国医学影像学杂志(2021年6期)2021-08-13 08:43:38
今日农业(2020年22期)2020-12-14 16:45:58
红土地(2018年7期)2018-09-26 03:07:38
中学生数理化·八年级物理人教版(2017年3期)2017-11-09 03:05:23
小学科学(学生版)(2016年1期)2016-10-09 01:53:02
当代经济(2015年4期)2015-04-16 05:57:04