
无人机载Li DAR密林区大比例尺地形测绘方法与试验
2021-12-27 02:31贺媛卉黄庆飞段锦章卫思雨
经纬天地 2021年5期
贺媛卉 钟 良 黄庆飞 段锦章 卫思雨
(1.长江空间信息技术工程有限公司,湖北 武汉 430014;2.广东省国土资源测绘院,广东 广州 510500)
0.引言
密林地区大比例尺地形测绘一直是水利工程勘测工作中的“卡脖子”问题。(1)密林地区植被茂盛、地势起伏较大且难以到达,采用传统测量方法往往需要投入大量的人力和物力,工作强度大、周期长、成本高;(2)密林地区缺少明显纹理特征,采用航空摄影方法较难选取适合的地面控制点进行空三计算,无法获取地表数据[1]。
LiDAR(Light Detection and Ranging,激光探测及测距)是一种主动式遥感技术,它与定姿定位技术(POS/IMU)结合,通过发射激光脉冲并接收回波获取目标物体表面的三维点云数据,具有获取数据量大、测量精度高且具有一定穿透性等特点,在工程勘测、自然资源调查、城市规划、应急救灾等领域有着较为广泛地应用[2]。根据搭载平台和作业方式的不同,Li DAR可分为机载激光雷达、地面架站式激光雷达、地面移动式激光雷达等[3]。常规机载激光雷达由于飞行航速和相对航高较高导致点云密度较小,穿透密林到达地表的点非常稀少[4],无法满足大比例尺地形测绘的技术要求;而随着无人机平台续航时间、稳定性的不断提高和任务载荷持续向小型化、轻量化发展,无人机载激光雷达与常规机载激光雷达相比则具有获取点云密度更高,航线设计和作业规划更为灵活等特点[5,6]。本文以实际项目为例,对基于无人机载LiDAR技术开展密林地区大比例尺地形测绘的设备选型、航线设计、数据处理等几个方面进行探讨,并根据实测数据对实施效果进行考察。
1.项目概述
本试验任务总面积约12平方千米,要求获取1∶2000地形数据。任务区域地处山区,最低海拔200米左右,最高海拔900米左右,地形起伏较大,植被茂密,交通不便,采用无人机载LiDAR系统进行航摄。
2.设备选型
本试验采用云影飞扬C200垂直起降无人机平台搭载RIEGL_VUX-1LR 1350激光扫描系统,设备技术参数(如表1所示):

表1 设备技术参数
3.试验与分析
本试验采用垂直起降固定翼无人机搭载LiDAR系统对测区进行航空扫描,获取地面点云与影像数据,并基于地面基站数据对获取的机载POS数据进行差分处理,生成包含坐标与姿态信息的轨迹文件,与激光测距文件和检校参数进行联合解算,生成激光点云.las数据。分别进行自动点云分类和手工精细点云分类,分类出地面点,自动构建三角网生成DEM,并进一步生成等高线,通过对等高线进行编辑,形成最终地形测绘成果。技术流程(如图1所示):

图1 项目技术流程
3.1 参数设定及航线设计
航速和扫描角一定时,点云密度与激光器脉冲频率成正比,与相对航高成反比。而本试验航摄时间为7月,正值树叶茂密期,激光脉冲的传播损耗较大,激光器脉冲频率升高会造成单个激光脉冲的能量减少,从而导致回波率的显著降低,造成地表点密度的减少,因此脉冲频率并非越大越好,而应结合测区地形、相对航高等因素综合考虑,选取相对较优方案。本文分别对100kHz-200米相对航高(方案一)及200kHz-300米相对航高(方案二)两种方案获取的地面点密度进行考察,两次点云对比剖面(如图2所示):
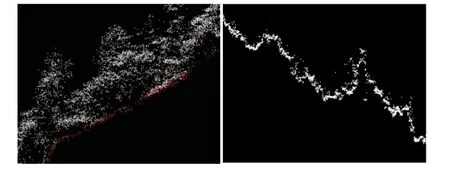
图2 方案一与方案二点云对比剖面
采用多次重复扫描方式提高点密度以满足SL197-2013规范中1∶2000地形测绘要求,结果(如表2所示)。可以看到,采用方案一获取的实际地面点密度更高,且重复扫描3次时,平均点间距为1.4米,满足规范要求。

表2 不同参数下的点云密度情况
3.2 点云数据解算
航迹文件解算及点云生成流程(如图3所示):

图3 点云数据解算流程
(1)航迹解算。解算前,需要将静态基站架设获取的原始GNSS数据进行格式转换,输入已知精确坐标和天线高,选择天线类型和量测位置,进行航迹数据的差分计算。航迹解算是影响最终点云精度的重要因素,当最终点云精度不理想时,应采用不同方法(选择不同基站数据或采用PPK等)进行解算并选择最优解,避免航迹解算不佳影响最终点云精度。
(2)在后处理软件里进行LiDAR系统安置误差检校。
(3)航带数据的匹配平差:导入航迹文件和原始激光测距文件,解算出激光点云数据(若相邻航带高差差异很大,需重新解算),解算好的激光点云将在软件里进行航带数据的匹配平差。一般要求相邻航线的激光点云匹配误差均在0.05米之内,才能进行后续的制图工作。
(4)无人机LiDAR获取的原始数据通常为标准UTM投影下的大地高,而此项目制图成果为工程独立坐标系下的正常高,需要通过平面和高程控制点测量,将原始LiDAR数据进行坐标和高程转换。
(5)经过坐标、高程系统转换后,根据测区实测的检查点,检验点云高程和平面精度是否符合要求。
3.3 点云滤波
3.3.1 点云自动分类
在滤波软件中编写适合测区地形条件的宏命令,自动对点云数据进行分类,分离多路径效应产生的低点,分类地面点。需对各个参数进行多次试验,以找到最优的宏参数。运行分类宏命令时,相邻数据块之间的重叠区需设置为50米,以减少数据块之间的接边差。
3.3.2 手工精细分类
主要目的为消除自动分类时错分成地面点的噪点和低矮植被,以及由于地形复杂(分类参数无法顾及所有地形)导致的山顶、陡坎、悬崖等漏分情况。编辑时,一般同时集合两种方式作参考,互相取长补短,并通过对以下内容的检查来保证点云分类的质量:(1)分类结果与正射影像是否对应;(2)地面点云表面模型是否连续、光滑;(3)地面点的剖面图形态是否合理。
3.4 点云数据精度
选取5个区域点云地面点DEM,采用内插高程点方式与1981个外业实测点比较,精度(如表3所示)。依据SL197-2013规范,山地图幅等高线高程允许中误差为±h(h为基本等高距,本试验中为2米。),密林地区放宽1.5倍后允许中误差为h。因此,本项目地形测绘成果满足1∶2000精度要求。

表3 不同参数下的点云密度情况
将点云数据生成的等高线与传统立体测图方法获取的 等高线叠加(如图4所示):

图4 两种方式生成等高线叠加
图中红色是LiDAR地面点点云,橙色为地面点DEM处理后的曲线,绿色为传统立体测图处理曲线,可以看到相较于传统立体测图模式,基于无人机载LiDAR技术生成的等高线明显具有更高精度和更丰富细节。
4.结论
本文根据实际工作中对山区地形测绘的任务要求,利用无人机载激光雷达作为新型的测绘手段,获取了山区的点云数据,在对点云数据进行处理后,得到了山区的地表点云数据并对其做了检验与分析。试验结果表明:利用无人机载激光雷达获取的点云经过后处理后,得到的山区地表点有着较好的精度和密度,能够满足山区地形图绘制的要求,这为山区地形的测绘提供了更加先进和便捷的手段,同时通过此次密林区域数据处理分析可以看出,在利用激光测绘山区大比例尺地形资料时,因茂密的植被会对获取的点云质量产生明显影响和差异,所以在设置采集参数时,应充分考虑无人机相对航高的设置、扫描频率的变化、目标地物的特征,才能获取足够的地面点密度,使其能克服植被影响,保障后续滤波算法得以顺利执行,充分发挥机载激光扫描特性。
猜你喜欢
北京测绘(2022年5期)2022-11-22
汽车观察(2021年8期)2021-09-01
青年歌声(2019年12期)2019-12-17
广东教学报·教育综合(2019年87期)2019-09-10
中国交通信息化(2019年1期)2019-03-26
测绘通报(2019年1期)2019-02-15
电子制作(2018年16期)2018-09-26
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2016年6期)2016-11-16
地理教育(2016年10期)2016-11-09
