
基于样条逼近的全站仪测量误差自动识别研究
2021-12-27 02:31:46何厚学
经纬天地 2021年5期
何厚学
(甘肃铁道综合工程勘察院有限公司,甘肃 兰州 730000)
0.引言
全站仪测距比同层次测量仪器测距更长,在提升操作便利性的同时也能够保证测量工作效率。但全站仪测量容易受到测量环境干扰,从而对全站仪测量精度产生影响。因此,需要对全站仪测量误差识别,以便于后续纠正错误,降低全站仪测量误差造成的损失。
国外对于全站仪测量误差自动识别的研究,尚停留在对全站仪测量仪器的维护上,仅就数据观测中的误差及环境影响做统计,缺少对全站仪导线测量的主要误差源研究。国内图像识别技术较为成熟,能够对测量误差予以精确识别分析。正因如此,国内对全站仪测量误差的研究范围较广,涉及全站仪损坏误差、对中偏心误差及测距误差,其中横轴与竖轴的垂直误差为全站仪测量误差识别的主要内容,这也是目前针对全站仪测量误差研究的主要方向:利用基坑水平位移,对全站仪极坐标检测,同时分析误差并合理控制。
文献[7]中,结合三角高程测量的原理对全站仪测量阐述,通过对工程的测量确定全站仪三角高程测量的过程,对比普通水准测量说明全站仪测量的优点,测量应用缺少对全站仪测量误差的计算。
文献[8]中,根据全站仪测量使用方法总结全站仪的测量原理,对全站仪测量精度的策略制定,以此提高全站仪煤矿测量工作效率,虽然全站仪的测量效率得到提高,但测量过程操作规范度不够,导致测量误差增大。
文献[9]中,对全站仪的测量记录功能说明,对全站仪测量工程的精度单位计算,通过高斯平面校正投影边长,使得矿山测量工程进展流程加快,保证全站仪测量工程的贯通性,但高斯平面校正投影存在大气折射误差。
文献[10]中,对全站仪自由设站的测量工作分析,通过高精度全站仪三角高程测量,设计高程测量误差传播公式,根据公式计算测量误差和大气折光系数,以此为基础提高全站仪水准测量精度。但这种方法存在观测棱镜偏移。
本文通过样条逼近技术布设交叉测量网络,以测量网络为测量平面建立坐标系,计算全站仪测量误差特征向量,规范测量操作过程,在计算大气折射误差的同时,使得全站仪观测棱镜始终保持在中心位置上,为避免因导向边长相差过大引起误差,需保证全站仪观测导线边长相等。
1.基于样条逼近的全站仪测量误差自动识别方法设计
1.1 计算全站仪测量误差特征向量
对测量误差自动识别前,需要识别误差特征向量,因此要对全站仪测量误差特征向量计算。(如图1所示)在测量物体表面设置数个固定测点。测点分别为(M1,M2,…,Mn),n≥4,设置固定测量的垂足点为(M1′,M2′,…,Mn′),由此求得固定测点到垂足点的距离为(M1M1′,M2M2′,…,MnMn′),设测量物体表面到垂足点的距离为r,由此得到该距离条件为r=。计算距离条件为r的全站仪固定测距向量,得到测距向量的集合为,…,。因此,计算得轴线向量的垂直条件,如公式(1)所示:
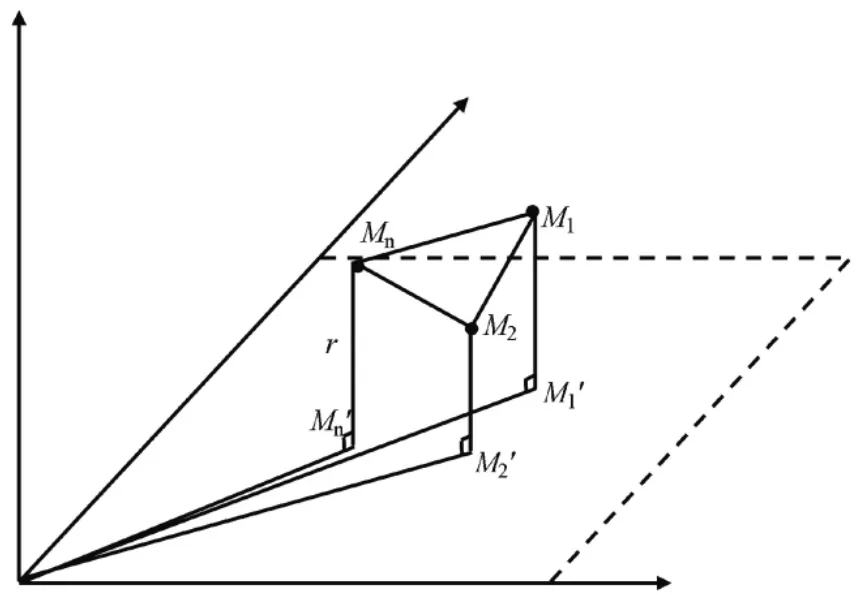
图1 全站仪测量误差特征向量数据
据此,得到全站仪测量固定的共线条件,为轴线上四个垂足的距离相等,即。
测量固定共线条件中常见线性函数,设固定测点的观测值误差为(m1,m2,…,mn)。独立观测值与观测函数值并不相等,由此得到误差mz在函数z中计算公式,如公式(2)所示:

式(2)中,(k1,k2,k3,…,kn)为对应固定测点误差值(m1,m2,…,mn)的倍率系数,设全站仪独立观测函数z的表达式如公式(3)所示:

式(3)中,(x1,x2,…,xn)为函数总的处理观测值,独立观测函数对应的误差值为(m1,m2,…,mk),利用真差关系处理对应观测值与函数值,得到函数的全微分表达式,如公式(4)所示:

对独立观测函数全微分表达式做真差处理,得到真差替代处理后的关系表达式如公式(5)所示:

式(5)中,独立观测函数对xi的偏导数可以表示为(i=1,2,…,n),确定观测值与函数式,将偏导数整理为常数的形式,将误差计算公式与偏导数建立关系,得到公式(6)所示:

利用公式中的函数中误差,计算全站仪测量误差特征向量,表达式如公式(7)所示:

根据全站仪测量误差的特征向量,分别确定对应观测值的误差值,根据全站仪测量误差特征向量,设计全站仪测量误差自动识别算法。
1.2.设计全站仪测量误差自动识别算法
利用全站仪测量误差特征向量,制定全站仪测量误差特征标签。收集全站仪测量误差特征向量标签中的信息,对类似的特征向量信息予以存储,以此作为方向设计测量误差自动识别算法。
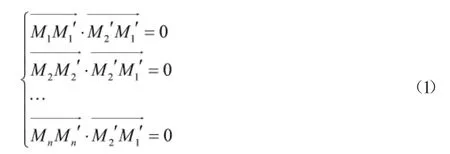
整合测量误差特征向量到同一个训练集中,并设置训练集的标签。(如图2所示)将全站仪测量误差特征向量转换为空间直角三维向量。以方差阵的形式设计每个角度方向的向量表达式B=[β α]T,其中,T为全站仪测量训练集合维度,得到协方差的空间直角三维向量计算,如公式(8)所示:
图2 坐标转换为空间直角三维向量
利用判断全站仪测量误差协方差的空间直角三维向量,确定全站仪测量误差分量识别内容,设全站仪测量误差出现的次数为n,针对测量误差识别特征点xi重复测量,并对比测量标准偏差s(xi),由此得到全站仪测量误差的识别平均值为s(x)。设计全站仪测量误差的识别不确定度的计算,如公式(9)所示:

式(9)中,sj为全站仪测量误差的标准平均值;m为总测量次数,根据不确定度的来源识别合成测量误差的输出量,设Y为待测目标的测量误差结果,整合识别的测量误差输入量N=[X1,X2,…,XN],根据测量误差识别输入量与输出量之间的映射关系,得到线性函数Y=f(X1,X2,…,XN),利用线性函数整理全站仪测量误差自动识别输出量与输入量,如公式(10)所示:
式(10)中,N为线性函数整理全站仪测量误差自动识别输入量个数,XN为识别测量误差输入量的末端值,据此得到全站仪测量误差的自动识别矢量公式,如公式(11)所示:
根据自动识别矢量公式中的单元结构参数,判断空间姿态的识别参数分量。对比分量中的分量常数及单元方向向量,确定全站仪测量误差自动识别的内容。根据全站仪测量自动识别内容,结合样条逼近技术构建自动识别模型,通过全站仪测量误差的自动识别相关性,对全站仪空间分量的测量误差识别。
1.3 构建样条逼近全站仪测量误差自动识别模型
根据全站仪测量误差自动识别算法,分配样条逼近全站仪测量误差自动识别的分量,据此给出相互独立的测量误差自动识别内容,通过输入映射核函数空间特征,实现非线性间隔分类。
针对全站仪测量误差自动识别算法,设计测量误差损失函数,根据选择的不平衡测量参数,区分小类样本测量误差识别与训练集测量误差识别。构建全站仪测量最优参数集合,并据此设计全站仪测量误差识别增长序列g=2-15,2-13,…,23,设为全站仪测量误差自动识别修正值,则识别误差观测点间的距离如公式(12)所示:

式(12)中,K为样条逼近测量误差的修正集合,即K=[K1,K2,K3],转换得到识别误差修正集合的常数矩阵,利用修正集合中的常数项,对误差观点间距离计算识别向量的方差阵予以表达,如公式(13)所示:

设全站仪测量误差自动识别中的测点坐标为T=[x0,y0,z0],根据误差识别测点坐标表达方差阵方向向量,利用测得的全站仪向量方差阵对误差特征予以表达。设定特定的全站仪测量误差自动识别阈值,以阈值为限确定样条逼近的全站仪测量误差的识别结果,判断全站仪测量误差的识别拟合结果,对向量中的拟合维度判断。利用曲线逼近的辨别临界滑动面,判断全站仪测量误差自动识别的特征误差拟合,以此为基础对样条曲线重构,压缩并控制观测点。利用渐进迭代逼近的方法,对测量扩展曲线识别。以此完成对样条逼近全站仪测量误差自动识别模型的构建。
利用构建的样条逼近全站仪测量误差自动识别模型,确定全站仪测量误差自动识别的向量维度,根据维度中测量误差的特征,对应自动识别的测量误差指标,在确定模型的F1-measure小于常规值时,将测量误差的向量维度导入自动识别资料库中。根据资料库中全站仪测量误差维度,确定自动识别的填补项。并针对全站仪测量误差自动识别训练集,对全站仪测量误差特征分类,以确定自动识别对应的特征向量内容。对比特征向量内容与预定阈值大小,完成对全站仪测量误差的自动识别。
1.4 完成全站仪测量误差自动识别
利用全站仪测量误差自动识别模型,对全站仪测量误差自动识别。构建不同种类的全站仪测量误差识别标准,考虑到全站仪的测量视场范围较大,要确定角度仪器的修正范围,设定位瞄准的相关重复性误差系数为0.4,全站仪的自准分辨率在以0.01"下,设全站仪测量误差自动识别中线坐标轨迹的计算,如公式(14)所示:

式(14)中,轨迹检测误差的测量值为g,则水平倾角在轨迹中线以外的测量误差识别,需要以全站仪测量误差独立坐标原点为中心,做坐标转换处理,如公式(15)所示:

式(15)中,R为全站仪测量误差旋转矩阵,据测判断全站仪测量误差自动识别后的内积结果Z=XiXc+YiYc+ZiZc。根据测量误差的自动识别内积结果设定测量误差外积处理内容,针对自动识别的内积设定结果计算测量误差自动识别的不确定度。
将全站仪测量误差自动识别的算法转换为矩阵乘法,根据全站仪视准轴的空间位姿确定不确定度的单元动态位姿,确定全站仪测量误差初始向量水平轴方向。得到样条逼近的全站仪测量误差自动识别不确定度的公式,如公式(16)所示:
式(16)中,∂为全站仪测量误差的包含因子;θ为测量误差扩展角度,利用样条逼近的全站仪测量误差自动识别的不确定度,对样条逼近的全站仪测量误差计算,以此确定测量误差识别的矢量大小。根据置信概率重新构建自动识别误差矢量矩阵,得到自动识别测量误差的动态坐标(如图3所示):
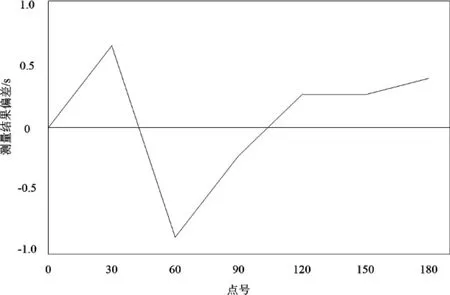
图3 自动识别测量误差的动态坐标
图3中,按照点号的顺序,对全站仪测量误差自动识别,识别结果自动生成折线,根据测量结果的偏差,对全站仪的测量误差计算。至此,完成对基于样条逼近的全站仪测量误差自动识别方法设计。
2.实验分析
为提高误差识别的速率,设计对比实验,对比数据分析识别法、二值化检测识别法、基于样条逼近的全站仪测量误差自动识别方法的测量误差识别SVN(SVN全名Subversion,即版本控制系统)检出量。
2.1.准备过程
应用全站仪对某目标进行测量,对全站仪测量现场中自动识别需要的基础数值(如图4所示)进行测量。
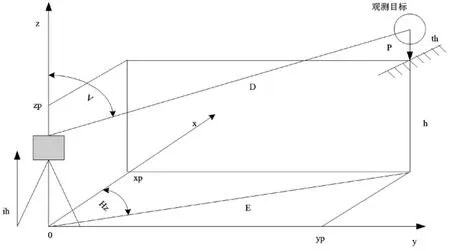
图4 全站仪自动识别基础数据采集示意图
处理图中的基础数据,根据观测目标到全站仪的距离D,确定观测目标的实际测量测距,E为全站仪到观测目标的实际距离;yp为观测目标到测量平面y的垂足;xp为观测目标到测量平面x的垂足;v和Hz分别为全站仪测量角度和观测目标;0为全站仪测量所在的坐标原点;P为观测目标所在的点;th为观测目标距离最短平面的距离;ih为全站仪观测平面到地面的距离。
整理好基础数据后,移动观测目标,并对上述基础数值进行移动后的测量,针对全站仪移动线路计算,得到全站仪测量误差自动识别的线路偏差结果(如图5所示):
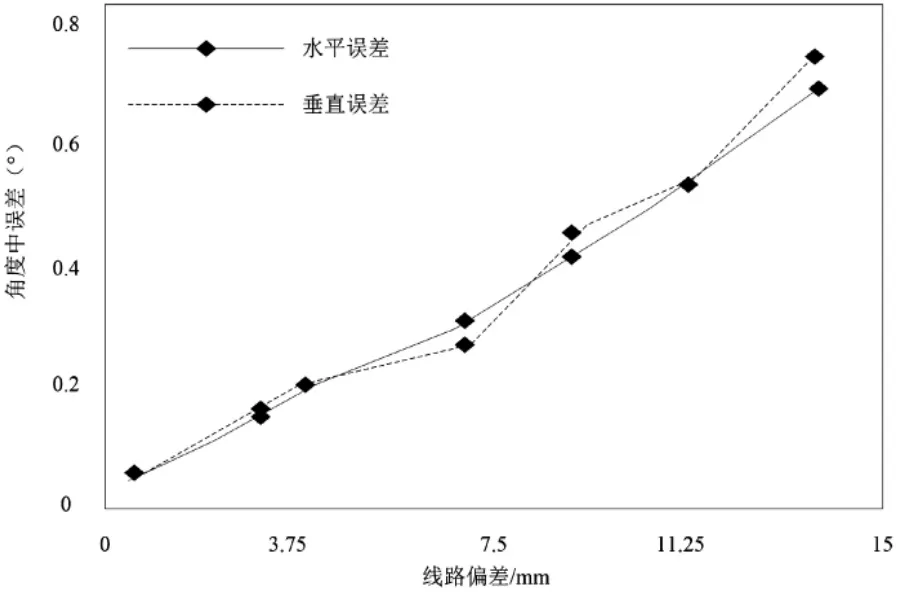
图5 全站仪测量误差自动识别的线路偏差结果
分析图中线路偏差结果可知:水平误差与垂直误差的线路偏差结果相近。由此可知线路测量选点操作与误差检出的线路偏差波动集中在3.75mm~7.50mm之间,为了保证线路偏差结果更接近测量误差标准,选择角度中误差在0.4°~0.6°的线路偏差区间作为实验测量内容。线路偏差区间中的测量误差数据分为10组。通过整理全站仪测量的自动识别测量结果,根据测量选点确定偏差波动的数据特征,针对上述数据特征做自动识别监测。针对全站仪测量误差自动识别中的水平误差与垂直误差做区分处理,分别计算线路偏差与角度中误差,由此整理得到十组测量误差识别SVN检出量。
2.2 分析结果
整理得到全站仪测量识别误差SVN检出量(如图6所示):
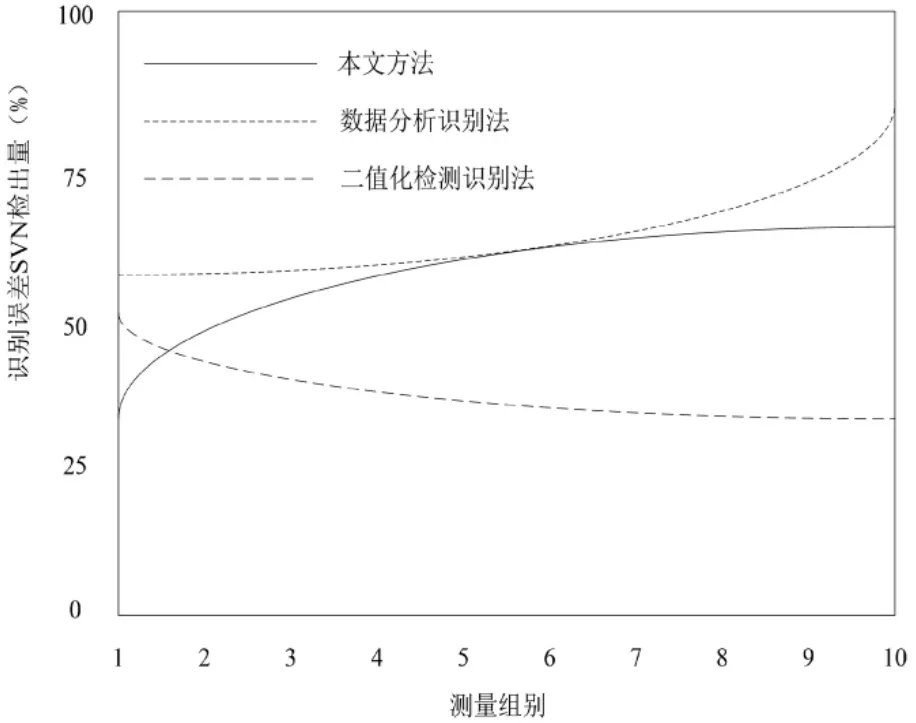
图6 测量误差自动识别前后的误差SVN检出量
由图6可知:数据分析识别法的全站仪测量识别误差SVN检出量在0.60以下,由于检出量受测量次数干扰逐渐趋于平稳,因此在后续的7~10组测量检出无明显变化,对后续测量结果的误差检出始终保持不变。可见应用数据分析识别法对全站测量误差的检出效果并不明显。
应用二值化检测识别法的全站仪测量识别误差SVN检出量在0.50以下,测量检出率在达到第7组时趋于平稳,整理测量识别检出率低于数据分析识别法。
应用基于样条逼近的全站测量误差自动识别方法,全站测量误差自动识别前后的误差SVN检出量在前几组保持稳定,处于0.60左右,在第5组测量检出结果后,误差SVN检出量明显上升,在第10组达到检出最高为0.88。因此,基于样条逼近的全站仪测量误差自动识别方法更优异。
3.结束语
通过本文研究,提高了全站仪测量误差自动识别的检出量。构建样条逼近全站仪测量误差自动识别模型,为全站仪测量误差自动识别提供基础数据。今后应继续研究提高全站仪测量精度,制定全站仪的测量识别指标,以此为基础建立基坑水平位移测量模型,利用测绘的空间地理信息提高全站仪的利用率。
猜你喜欢
安徽师范大学学报(自然科学版)(2022年3期)2022-07-14 03:54:42
中学生数理化·八年级物理人教版(2021年12期)2021-12-31 03:23:02
应用数学(2020年2期)2020-06-24 06:02:40
特别健康(2018年3期)2018-07-04 00:40:18
制造技术与机床(2017年7期)2018-01-19 02:30:00
软件(2017年6期)2017-09-23 20:56:27
计算机测量与控制(2017年6期)2017-07-01 16:24:14
发明与创新(2016年26期)2016-08-22 03:23:28
电测与仪表(2016年6期)2016-04-11 12:06:38
电测与仪表(2015年18期)2015-04-12 00:45:28
