北斗导航定位系统在我国精准农业自动导航中的应用研究
2021-12-24 23:47朱小韦周荣
科技信息·学术版 2021年3期
朱小韦 周荣


摘要:本文介绍了北斗定位系统在我国精准农业自动导航中的应用现状,介绍了北斗导航定位系统及其在精准农业自动导航中的具体应用,展现了其在精准农业中良好应用前景。
关键词:北斗定位系统;精准农业;自动导航
0 引言
目前中国粮食产量稳定,连续五年稳定在6.5亿吨台阶之上,但是农产品供需结构性矛盾突出,表现在:1)粮食因品质不均一、品质差而导致“卖粮难”:小麦优质率不足10%,优质麦年需求 2000万吨,其中进口 1000万吨;2)高品质消费需求得不到满足:2003年起,城乡居民食物消费升级并不断提升,粮食的安全成为强需求。生物效能产出达到瓶颈,而数字施肥、土壤、播种管理技术对农业生产效能的贡献率连年增高。未来农业升级转型加快,需依靠数字管理技术推进农业高质量发展。
精准农业是将导航、通信与自动化控制技术运用于农业生产,利用现代机械设备与监测系统进行田间管理,针对田间具体环境与作物状况因地制宜,精细准确地开展施肥、施药等土壤管理及播种、收割等作物管理措施。精准农业的目的为降低产业投入条件下获取更优的产出,提升作物产量和质量,保护生态环境,促进农业可持续发展[1-3] 。发展精准农业的本质目的就是通过降低产业投入量,在有限的土地资源和作业条件下,生产出高产量和高质量的农作物,保护农田生态环境,促进农业产业实现可持续发展。
精准农业体系主要包括卫星导航系统、地理信息系统、遥感技术、管理信息系统及自动化控制等[2]。卫星导航系统是精准农业的重要技术支撑,也是现代农业可持续发展的关键技术。2020年6月23日最后一颗北斗卫星升空,作为我国完全自主设计的全球定位系统,全球范围定位精度优于10m(根据最新测算,全球实测定位精度均值为 2.34m),北斗卫星导航系统可提供免费、实时的无源定位服务,必将在推动精准农业机械自动导航的发展中,起到重要的助推剂作用。
1 精准农业国内外现状
(1)国外现状
20世纪80年代美国提出了精准农业的构想,1995年美国在联合收割机上装备GPS,实现了精细化作物收割应用,标志着精准农业技术的诞生。在随后的发展中,利用 GPS、计算机网络和自动化机械的结合逐渐实现了播种、收割、施肥、灌溉等农业作业的精细化,大大降 低了大面积作业下的人力和资源投入,提高了工作效率和经济收益。欧洲、北美、澳大利亚、日本等多个国家相继开展本国精准农业,并基于卫星导航、微机械惯导(MEMSINS)等技术发展相应的自动化农机,实现自动化作业生产,如无人播种机、无人驾驶拖拉机等[4]。
(2)国内现状
中国精准农业发展起步较晚,但在国家“863”计划等重大专项的支持下,中国在精准农业领域取得了较快发展。我国主要集中在将卫星导航技术应用于农 机引导方面,如将卫星导航系统应用于无人驾驶拖拉机自主导航和高精度作业方面,例如:雷沃公司农机直线跟踪精度±2.5cm,接行精度±2.5cm,解决了“播行不直,接行不准”的瓶颈。随着4G/5G网络技术、物联网技术和千寻网络高精度定位技术的发展,结合传感器,自动导航技术正在贯穿于监控终端(播种监控、产量监控等),如下图1,技术日臻完善。
2 北斗简介及技术优势
1.北斗简介
北斗卫星导航系统 (BDS)是中国正在实施的自主发展、独立运行的全球卫星导航系统,是继美国全球卫星导航系统(GPS)和俄罗斯全球卫星导航系统(GLONASS)之后第三个成熟的卫星导航系统。北斗卫星导航系统由空间段、运控段、和用户段组成。北斗卫星导航系统坚持“三步走 ”发展战略,第一步形成区域有源服务能力,2000年,我国建成了由2颗北斗一号GEO轨道卫星组成的国内导航卫星试验系统。2003年和2007年,我国又发射第3颗、第4颗北斗一号GEO轨道卫星,进一步增强了系统的性能;第二步形成区域无源服务能力,2012年,我国建成了由14颗北斗二号卫星(5颗 GEO卫星+5颗 IGSO卫星+4颗MEO卫星)组成的区域导航卫星星座。第三步形成全球无源服务能力,2020年6月,我国建成了由30颗北斗三号卫星(3颗GEO卫星+3颗IGSO卫星+24颗MEO卫星)组成的全球卫星导航星座,北斗三号卫星完成空间星座部分组网,完成建设后的北斗卫星导航系统可在全球范围内全天候、全天时为各类用户提供高精度、高可靠定位、导航、授时服务、并具备短报文通信能力。
2.北斗的技术优势
农机进行作业,对定位精度有一定的要求,精准农业对卫星导航定位精度的需求与作物种类和作业方式高度相关,随着定位性能的提升投入成本也迅速增加,不同的农机作业,需要不同的定位精度。自动化驾驶、变量播种、土地整理需要厘米级定位精度;信息采集、變量控制、产量监控、作业统计需要分米级定位精度;农机监控、调度导航、作业监测等只需要米级定位精度[5]。
相对于别的定位系统,北斗导航定位系统的技术优势体现如下:
覆盖范围广:北斗系统特有的GEO+IGSO+MEO星座分布使得卫星更多地分布在东经 84°-160°区域,在我国信号覆盖范围广,可以实现稳定定位,满足精准农业发展对卫星定位连续性和有效性的需求。
提供三频定位,定位精度高:北斗已可为民用用户提供B1/B2/B3 3个频点的定位服务。对于单点定位,三频有助于将空间导航信号传播的电离层误 差更好地消除,以获得精度更优的定位性能。
3、北斗在我国精准农业导航中的应用
结合我国精准农业和北斗定位技术发展现状,北斗卫星导航系统在精准农业中导航中的规模应用,主要在三个方面,一是精准自动导航应用,二是精准作业应用,三是精准管理应用[6]。
基于北斗卫星导航定位的自动驾驶导航技术直接驱动拖拉机的转向系统,在农机作业时可以代替人工操作方向盘,实现自动驾驶。
1.自动驾驶导航工作原理
在导航显示终端(车载田间计算机)中,设定到航线,通过方向轮转角传感器、北斗接收机、惯导系统获取拖拉机的实时位置和姿态,计算拖拉机与预设导航线
的偏离距离和航向,然后通过导航控制器,驱动拖拉机的转向系统,即时修正拖拉机方向轮的行驶方向自动驾驶导航系统在拖拉机的作业过程中,不断进行测量控制动作,拖拉机的行走路线无限接近于期望和预设的作业路径,如下图2。
2.自动驾驶导航系统的基本组成
(1)差分信号源
差分信号是拖拉机自动驾驶的基础。差分信号播发途径主要包括:
①通过无线电台播发,拖拉机需要配置一套无线数传电台;
②通过移动互联网播发,通过内置的移动通信模块接入差分信号;
③通过卫星播发,接收机通过北斗天线接收星基增强信号。
(2)GNSS天线
GNSS天线安装于拖拉机车顶的中心位置,可以接受北斗双频或三频信号。
(3)无线电台
差分信号以无线电台播发时,拖拉机也配置使用同样频率的无线数传接受电台。
(4)GNSS接收机
自动驾驶系统使用双频接收机,利用差分信号,实时计算精确的三维坐标。
(5)转角传感器
转角传感器用于实时检测方向轮的转向方向和转向角度。转角传感器通常安装于拖拉机的两个方向轮之间。
(6)导航控制器
导航控制器内置高灵敏度惯性测量传感器进行地形补偿,接收并处理转角传感器、北斗接收机和导航路径信息,向电动机或者液压阀等转向控制器输出控制信号。
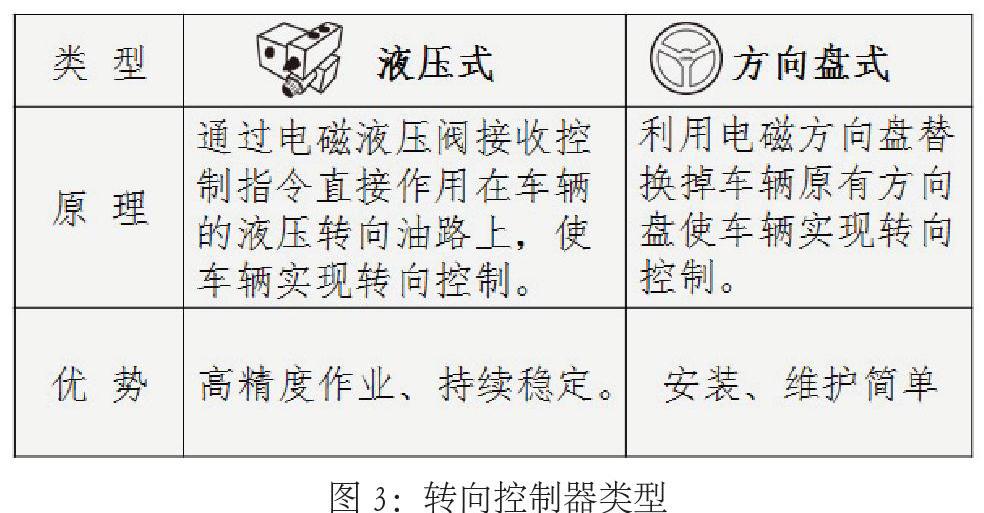
(7)转向控制装置
转向控制裝置主要包括电动机驱动和液压驱动两类,如下图3,分别实现机械式辅助驾驶导航和液压式自动驾驶导航。
(8)导航显示终端
导航显示终端主要是由计算机单元、显控屏幕、I/○接口等硬件组成。部分显示终端还与卫星接收机、光靶及惯导系统集成在一起。
通过通信、导航定位、自动控制的整合,可实现自动化农机的自主驾驶和自主作业,实现自动化精准农业生产。目前我国用于精准农业的北斗导航定位装备: 支持北斗/GPS双模定位;支持单点定位/动态RTK 位;支持基准站/ 流动站切换;单点定位精度,水平1.8m垂直3.6m;动态RTK定位精度,水平 10mm±1ppm 垂直 20mm±1ppm。大规横的应用推广的区域主要分布在黑龙江和新疆,其应用领域主要集中在播种环节,如玉米棉花马铃薯、水稻的播种。
4、结语
北斗应用于精准农业导航,有效提高了作业质量和改善了作物生长环境,大大提高了作业效率,但还存在一些问题:
(1)应用装备领域行业标准缺失,产品良莠不齐;
(2)在差分增强基础设施建设方面,缺少技术和管理协调,基准站重复建设现象严重;设备故障维修成本高等。
随着相关技术的进步,上述问题会不断得到解决,北斗在精细农业中的应用将会更加广泛。
参考文献:
[1]郭信平 曹红杰.卫星导航系统应用大全[M].北京: 电子工业出版社,2011.
[2]闵士权.卫星遥感与卫星定位在我国农业信息化建设中的应用[C].2007卫星通信与农村信息化发展研讨会,2007.2009(8):242-244.
[3]李强 李永奎.我国农业机械GPS导航技术的发展[J].农机化研究,2009(8):242-244.
[4]何成龙.北斗导航系统在我国精准农业中的应用[J].卫星应用,2014(12):24-27.
[5]吴才聪.美国标准农业技术应用概况及北斗农业应用思考 [J].卫星应用,2015.
[6]董柳柳 沈 飞.北斗技术在精准农业中的应用与展望[J].农机科技推广,2019(10):44-46.