
变电站设备状态智能识别系统技术研究
2021-12-22 11:33:56李新海徐宝军范德和曾令诚肖星邱天怡袁拓来
电气传动 2021年24期
李新海,徐宝军,范德和,曾令诚,肖星,邱天怡,袁拓来
(广东电网有限责任公司中山供电局,广东 中山 528400)
变电站作为电网中的能源转换中心,是电力系统的重要组成部分,其设备状态的有效识别是确保电网安全和稳定的重要基础,也关系着电气设备工作人员及操作人员的生命安全。
目前变电站设备状态识别主要采用人工核对方式,存在以下问题:1)作业效率低。虽然变电站已普遍采用无人值班模式[1-3],但远方遥控进行设备倒闸操作时,设备现场仍需安排工作人员按照操作进度逐项确认设备状态,降低了倒闸操作的工作效率。2)工作质量不高。变电站内设备数量众多,倒闸操作后的设备状态核对、设备定期巡检或专项巡检的设备状态核对等作业任务的工作量较大、工作重复率高,容易使工作人员产生疲倦,导致工作质量不稳定,造成设备状态的漏判和误判[4-6]。3)巡检人员的安全难以保障。巡检的设备一般都是高压带电设备,如遇设备短路故障导致的爆炸将引发人身安全事故[7-8]。
近年来,随着我国视频监控技术及信息技术的大力发展,变电站遥视监控系统已得到普遍应用[9-11],但这类遥视系统目前还是主要作为辅助工具[11],提供对现场的实时监控画面预览,缺少对视频内容的自动分析功能,设备状态仍然依靠人工核对。针对该问题,众多研究者开始研究变电站智能视频识别技术,以实现设备状态的智能识别[12-16]。如文献[13]提出了一套基于视频图像技术的变电站智能化应用系统,但该系统仅用于辅助变电站综合自动化保护系统(简称综自系统)的刀闸状态视频校核,无法识别开关的状态,效果有限。文献[14]提出了一种基于图像处理技术的视频智能分析系统研究和实现方案,通过霍夫变换直线检测、cvBlob目标跟踪等图像处理和特征提取技术对视频流进行分析,实现了设备状态的自动识别功能,但该系统与SCADA系统相互独立、无数据交互,无法实现两个系统的信息联动,自动化程度不高。文献[15]提出了一种基于霍夫森林算法的开关设备检测及状态识别方法,通过图像处理算法检测与定位开关设备、判别开关状态,但未能结合变电站现有综合自动化系统且缺乏实际运行实例。
针对上述问题,本文提出并研制了变电站设备状态智能识别系统,通过与变电站SCADA系统的信息交互,实现了变电站开关、刀闸设备状态的远程智能识别。该系统可在变电设备倒闸操作、定期巡检、专项巡检以及日常设备状态监视中代替人工巡检开关、刀闸设备状态,及时发现并预警设备状态隐患,提高巡检效率和质量,降低运行人员的劳动强度,保障人身及设备安全。文章在介绍了变电站设备状态智能识别系统的结构设计及功能设计的基础上,详细阐述了开关状态综合判断、刀闸状态综合判断、智能巡检和视频联动等关键技术,最后通过500 kV文山变电站的实例运用,验证了该系统的有效性。
1 变电站设备状态智能识别系统结构和功能设计
1.1 系统结构设计
变电站设备状态智能识别系统结构如图1所示,该系统由智能巡检监控平台、智能图像识别服务器、视频服务器、监视终端等部分组成。
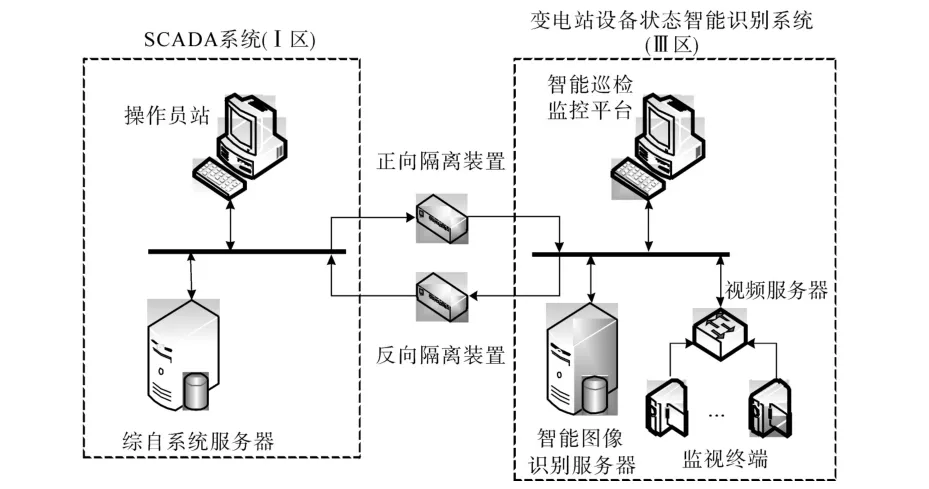
图1 变电站设备状态智能识别系统结构图Fig.1 Structural diagram of intelligent recognition system for equipment status in substation
智能巡检监控平台主要负责实现巡检视频监控管理,包括视频监控汇聚、信令控制管理、流媒体转发、远程巡视及操作配置实现、报警管理、与SCADA系统联动、图像识别告警接收处理、电子地图等功能。
智能图像识别服务器主要负责对开关、刀闸等设备的分合状态进行远程智能图像识别,通过采集开关分合位置指示牌、刀闸拐臂位置上专项加装的指示盘等设备图像进行关键特征点比对,从而完成对现场开关、刀闸分合状态结果的输出。如果开关、刀闸发生异位或三相位置不对应等情况,则自动推送报警信息,同时联动摄像机抓拍、录像。
视频服务器主要负责控制监视终端、缓存摄像头拍摄的视频图像;将监视终端抓拍的图片、边缘计算摄像头识别的设备状态反馈至智能巡检监控平台及智能图像识别服务器。
监视终端主要包括卡片摄像机、白光云台摄像机、红外筒型摄像机等,主要负责不同环境下设备图像拍摄及视频录制,并通过光纤通信将视频及图像数据传输至视频服务器。
变电站设备状态智能识别系统的智能巡检监控平台、智能图像识别服务器、视频服务器等设备通过专用以太网进行数据传输,变电站设备状态智能识别系统部署在变电站电力二次系统的管理信息大区的安全区Ⅲ,与位于电力二次系统的生产控制大区安全区Ⅰ的SCADA系统通过正向隔离装置和反向隔离装置实现数据的传输[16]。
1.2 系统功能设计
变电站设备状态智能识别系统工作流程图如图2所示。设备状态智能识别系统将从SCA⁃DA系统接收的信号按报文重要性分成设备异常告警信号、设备状态变位信号、设备遥控预置命令报文等不同优先级,并以此开展设备状态识别的特殊巡检并将结果信息通过反向隔离装置反馈至生产控制大区安全区Ⅰ的SCADA系统。如设备状态智能识别系统未从SCADA系统接收到任何任务,则优先开展自定义巡检任务,如无自定义巡检任务则按周期计划开展定期巡检并生成巡检报告。
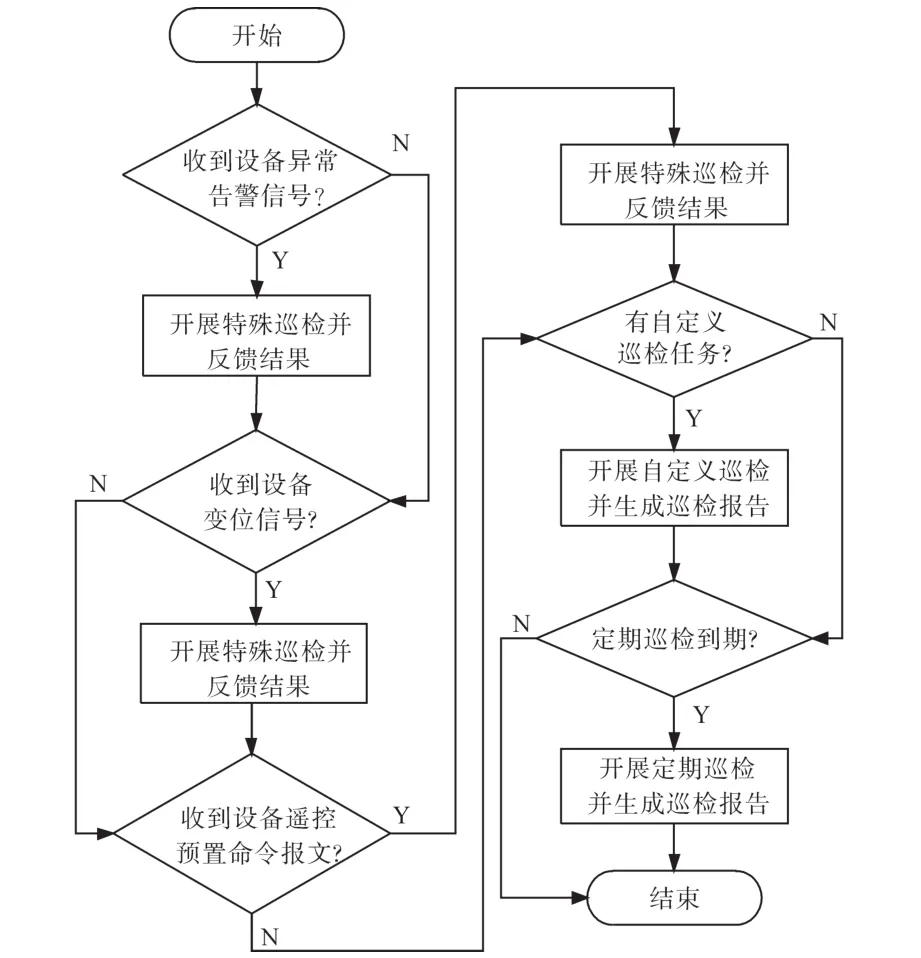
图2 变电站设备状态智能识别系统工作流程图Fig.2 Workflow diagram of intelligent recognition system for equipment status in substation
变电站设备状态智能识别系统主要实现以下功能:
1)设备状态智能识别功能。其主要针对变电站开关、刀闸等设备状态进行智能图像识别,通过开关、刀闸等设备关键特征点比对,完成对现场开关、刀闸等监视对象的分合闸位置的自动识别。在设备遥控预置操作时,该系统可将相关设备的状态识别结果反馈给SCADA系统,并将设备的相关视频输出至智能巡检监控平台的视频监视窗口;在设备状态变位后,自动获取设备的图像信息并智能判断设备状态与遥控指令是否一致,同时将结果反馈至SCADA系统。
2)设备状态智能巡检功能。其主要实现设备日常运行状况的智能巡检,主要有定期巡检、自定义巡检、特殊巡检等3种巡检方式。定期巡检按用户定制间隔时间周期开展;自定义巡检按用户需求个性化定制开展;特殊巡检用于设备出现异常、遥控操作、设备状态变位时由设备状态智能识别系统自动开展,并将结果反馈至SCADA系统,同时联动摄像机抓拍、录像,实现事前预警、事中跟踪、事后查询功能,为工作人员调整设备运维检修策略提供依据。
3)系统管理功能。其主要实现历史任务查询、报告查询、视频展示、告警、历史告警记录统计分析等。
2 变电站设备状态智能识别系统关键技术
2.1 开关状态综合判断技术
变电站设备状态智能识别系统主要采集开关位置遥信、开关遥测数据、智能图像识别服务器基于图像识别的开关位置等数据综合判断开关状态。其中开关位置遥信为站端SCADA系统采集的开关分合闸位置;开关遥测数据为站端SCADA系统采集的开关三相电流或电压,其电流取自本间隔电流互感器,其电压取自本间隔电压互感器或母线电压互感器;智能图像识别服务器利用单点多框检测器(single shot multibox detector,SSD)图像处理算法[17-18],通过分析开关在分闸位置、合闸位置时指示牌的不同特征信息识别开关状态。
SSD网络结构模型如图3所示,首先建立批量开关图像训练样本集并导入到SSD网络基础卷积层、辅助卷积层、预测卷积层,通过计算损失函数的位置误差与置信度误差更新SSD网络结构模型参数,反复训练,确定开关分合位置图像识别SSD网络结构模型。其次,将开关图像通过SSD网络结构模型定位图像中开关分合位置指示牌区域,并识别开关分合位状态。
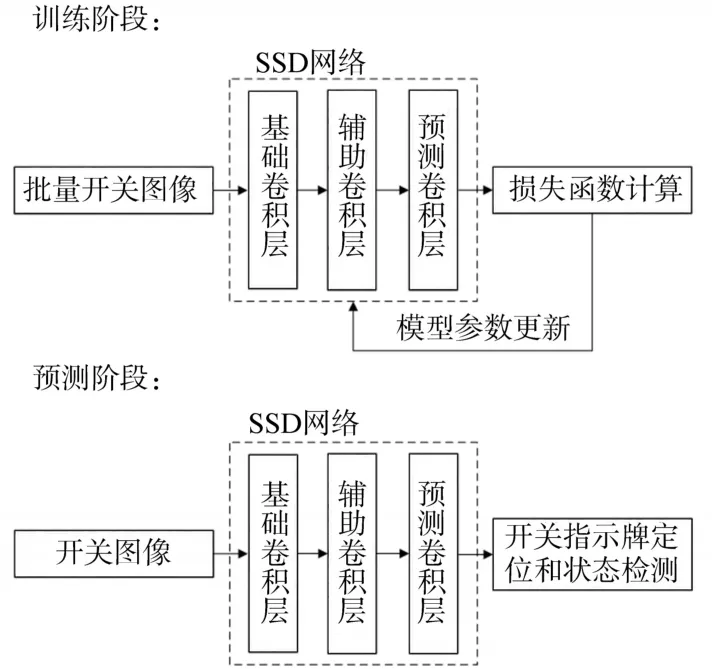
图3 基于SSD的开关状态识别算法网络结构Fig.3 Network structure of switch status identification algorithm based on SSD
开关状态综合判断逻辑图如图4所示。当开关位置遥信由合变分、智能图像识别服务器识别的开关位置为分位且满足“三相电流由有到无、母线电压由有到无、线路电压由有到无”中的任一条件,则确认开关位置为分位。当开关位置遥信由分变合、智能图像识别服务器识别的开关位置为合位且满足“三相电流由无到有、母线电压由无到有、线路电压由无到有”中的任一条件,则确认开关位置为合位。如以上开关分合位置判别结果不一致则报开关位置异常,提醒工作人员到现场检查消缺,避免开关分合不到位导致电力安全事故发生。

图4 开关状态综合判断逻辑图Fig.4 Logic diagram of comprehensive judgment of switch status
2.2 刀闸状态综合判断技术
变电站设备状态智能识别系统主要采集刀闸位置遥信、智能图像识别服务器识别的刀闸位置等数据综合分析确定刀闸状态。其中刀闸位置遥信为站端SCADA系统采集的刀闸分合闸位置;智能图像识别服务器则利用图像处理算法,通过分析刀闸在分闸位置、合闸位置时不同特征信息识别刀闸分合状态。
针对敞开式开关设备(air insulated switch⁃gear,AIS),由于其母线及刀闸裸露,直接与空气接触,智能图像识别服务器通过采集刀闸导电臂及触头图像并采用霍夫变换直线检测算法[14],对比待检测图像与模板图像,识别刀闸状态。针对气体绝缘金属封闭开关设备(gas insulated switch⁃gear,GIS),由于其开关、刀闸、接地刀闸等设备或部件全部封闭在金属接地的外壳中[19],智能图像识别服务器通过采集刀闸拐臂位置上专项加装的指示盘图像、采用SSD算法,定位图像中刀闸位置指示盘区域,并识别刀闸分合位状态。
刀闸状态综合判断逻辑图如图5所示,当刀闸位置遥信由合变为分且智能图像识别服务器识别的刀闸位置为分位,则确认刀闸位置为分位;当刀闸位置遥信由分变为合且智能图像识别服务器识别的刀闸位置为合位,则确认刀闸位置为合位。如以上刀闸分合位置判别结果不一致则报刀闸位置异常,提醒工作人员到现场检查消缺,避免刀闸分合不到位导致的电力安全事故发生。
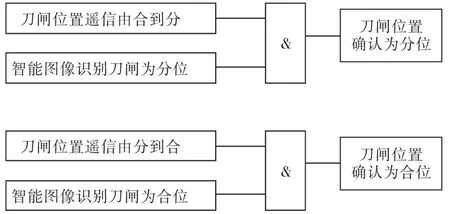
图5 刀闸状态综合判断逻辑图Fig.5 Logic diagram of comprehensive judgment of knife switch state
2.3 智能巡检技术
在设备正常运行时,工作人员可利用变电站设备状态智能识别系统开展设备智能巡检,设备状态智能识别系统支持定期巡检任务与自定义巡检任务,其中定期巡检任务可定制巡检周期、巡检内容、巡检顺序等项目,如定制每月20日对变电站全站开关、刀闸的设备状态巡检任务,该系统可按照相关巡检作业指导书进行巡检并生成报告。自定义巡检任务可随时新增设备巡检任务,如运行人员需对某间隔进行冷备用转热备用的操作,可在操作前人工定制一项对该间隔所有开关、刀闸状态进行巡检的任务,设备状态智能识别系统能迅速生成相应巡检任务,开展巡检并形成巡检报告。
当SCADA系统收到站端设备遥控预置、状态变位、告警、保护动作跳闸等运行状况信号时,可利用变电站设备状态智能识别系统联动复核相关设备状态,通过SCADA系统与变电站设备状态智能识别系统的数据交互及多维数据综合应用,智能巡检相关设备,为运行人员上报信息、检修人员消缺、管理人员制定检修策略提供有力支持,从而实现设备缺陷处理的快速应急响应。以变电站开关、刀闸、变压器等设备为例,SCADA系统发送给变电站设备状态智能识别系统的信息内容主要有:开关、刀闸的遥控预置命令,开关、刀闸、接地刀闸等一次设备的变位信号,主变压器、开关、刀闸等一次设备的非电量告警信号、保护动作跳闸信号等,具体信息如表1所示。如某个设备出现故障,变电站设备状态智能识别系统将收到SCADA系统转发的设备故障报文,设备状态智能识别系统可立即弹出该设备的相关视频图像信息,并将智能判断的设备状态信息结果反馈至SCADA系统,便于工作人员第一时间掌握故障信息并作出应急处理。
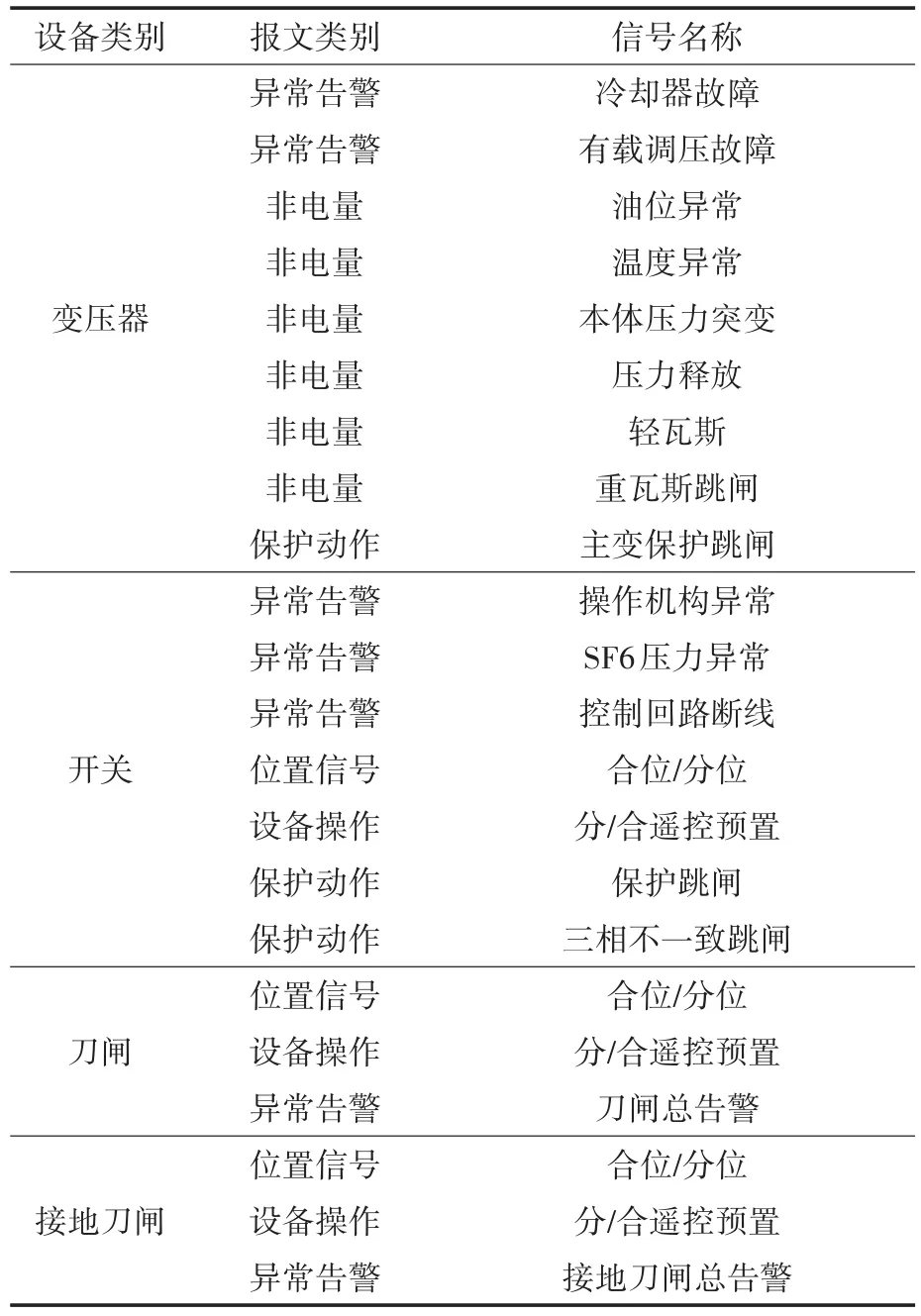
表1 变电站设备状态智能识别系统联动信息表Tab.1 Linkage information table of intelligent recognition system for equipment status in substation
2.4 视频联动技术
变电站设备状态智能识别系统支持电力104规约、IEC61850规约与SCADA系统实现数据通信,该系统通过接收SCADA系统的遥控、遥信和遥测数据,实现设备状态的视频联动功能,具体介绍如下:
1)遥控操作视频联动。SCADA系统在发出远方操作指令后,站端的设备状态智能识别系统立即通过智能巡检监控平台控制对应摄像机切换到指定位置,并在视频监视窗口弹出对应设备视频;同时该系统将开关、刀闸的状态识别结果上送至SCADA系统,提醒操作人员开关、刀闸是否分合到位以便远方操作人员对该设备的操作过程及实时状态进行全面分析和判断,保证遥控操作的可靠性验证,从而实现对设备的远程可视化操作与控制。
2)遥控操作的智能验证。当SCADA系统对某个设备发出遥控预置指令后,本系统可对主变压器、开关、刀闸、接地刀闸等设备的运行数据、设备状态遥信、设备状态图像等信息进行智能分析,判断设备状态与遥控指令、遥信结果是否一致,如异常则实时报警。该系统也可作为程序化操作的防误判据运用,从而实现开关、刀闸设备状态的多源确认[20]。
3 应用实例
500 kV文山变电站(以下简称“文山站”)地处中山市北部,是南方电网首座500 kV户内GIS变电站,也是南网智能技术应用示范点。本文研制的变电站设备状态智能识别系统已经成功应用于文山站2#主变三侧开关间隔,实现了对文山站2#主变开关、刀闸设备状态的智能监视与识别。
3.1 系统配置
文山站500 kV设备为户内GIS设备,220 kV设备为户内GIS设备,35 kV设备为户外AIS设备。目前已在文山站2#主变三侧开关间隔部署基于机器视觉的变电站设备状态智能识别系统,主要包括:智能巡检监控平台、智能图像识别服务器、卡片摄像机、白光云台摄像机、红外筒型摄像机、交换机、正向隔离装置和反向隔离装置等设备,配置情况如图6所示。
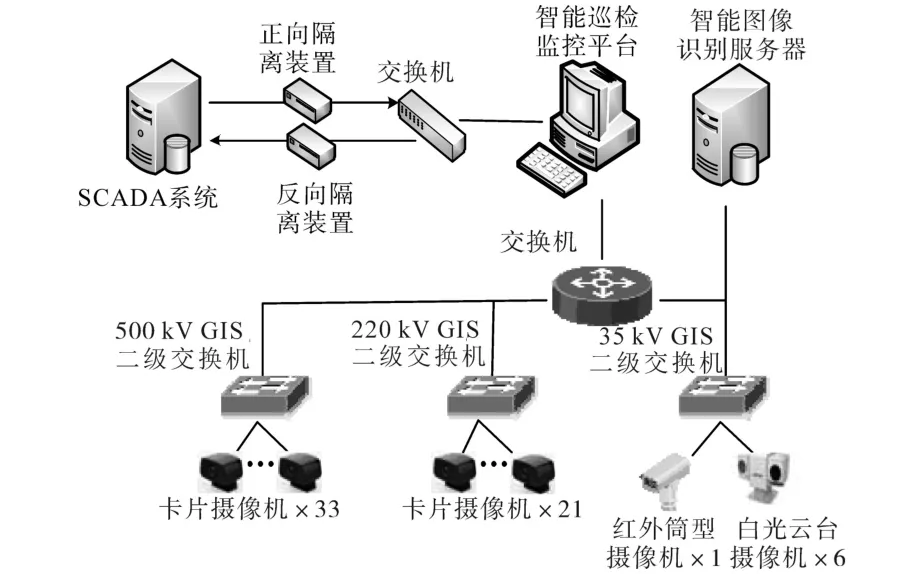
图6 文山站设备状态智能识别系统配置图Fig.6 Configuration diagram of intelligent recognition system of equipment status in Wenshan substation
图6中监视终端配置如下:
1)2#主变500 kV侧开关间隔需安装33台摄像机拍摄开关三相位置指示牌、刀闸及接地刀闸拐臂位置指示盘。其中开关每相需配置1台卡片摄像机,2台开关共需配置6台卡片摄像机;刀闸、接地刀闸每相需配置1台卡片摄像机,4组刀闸及5组接地刀闸共需配置27台卡片摄像机。
2)2#主变220 kV侧开关间隔需安装21台摄像机拍摄开关三相位置指示牌、刀闸及接地刀闸拐臂位置指示盘。其中开关每相需配置1台卡片摄像机,1台开关共需配置3台卡片摄像机;刀闸、接地刀闸每相需配置1台卡片摄像机,3组刀闸及3组接地刀闸共需配置18台卡片摄像机。
3)2#主变35 kV侧开关间隔需安装1台红外筒型摄像机拍摄开关位置指示牌,安装6台白光云台摄像机拍摄刀闸及接地刀闸触头实际位置。其中开关每台需配置1台红外筒型摄像机,1台开关共需配置1台红外筒型摄像机;刀闸、接地刀闸每组需配置2台白光云台摄像机,1组刀闸及2组接地刀闸共需配置6台白光云台摄像机。
通过设备状态智能识别系统在文山变电站2#主变的安装应用,有效地实现了2#主变三侧开关间隔的智能巡检功能。
图7为操作人员在后台监控机远方遥控2#主变变高侧5 031开关时,设备状态智能识别系统根据SCADA系统的遥控指令开展智能巡检的结果反馈,由图7可知,设备状态智能识别系统根据5 031开关的遥信位置、遥测电流电压情况,智能图像识别的5 031开关位置结果,综合判断确认5 031开关为合位。通过系统代替人工定期巡检变电站内开关的设备状态,提高了巡检效率和质量,降低了运行人员的劳动强度。
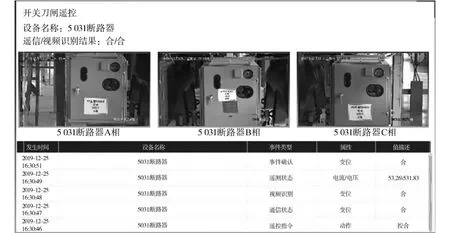
图7 综合判断5 031开关合位界面Fig.7 Diagram of comprehensive judgment of 5 031 switch status
3.2 效果分析
以文山站2#主变停电倒闸操作为例,设备状态智能识别系统投运前,运行人员对文山站2#主变停电操作需要两组人员共4人配合,一组人员在设备现场查看设备状态变位情况,另一组人员在主控室遥控操作,每操作一次设备后必需通知现场人员查看设备状态切换到位与否,确认后才可进行下一步操作。设备状态智能识别系统投运后,无需操作人员现场检查确认设备状态即可实现系统设备状态的远程自动识别,只需一组人员在主控室遥控就可完成设备倒闸操作,节省了变电设备倒闸操作时间,提高了倒闸操作效率。具体倒闸操作时间统计如表2所示。
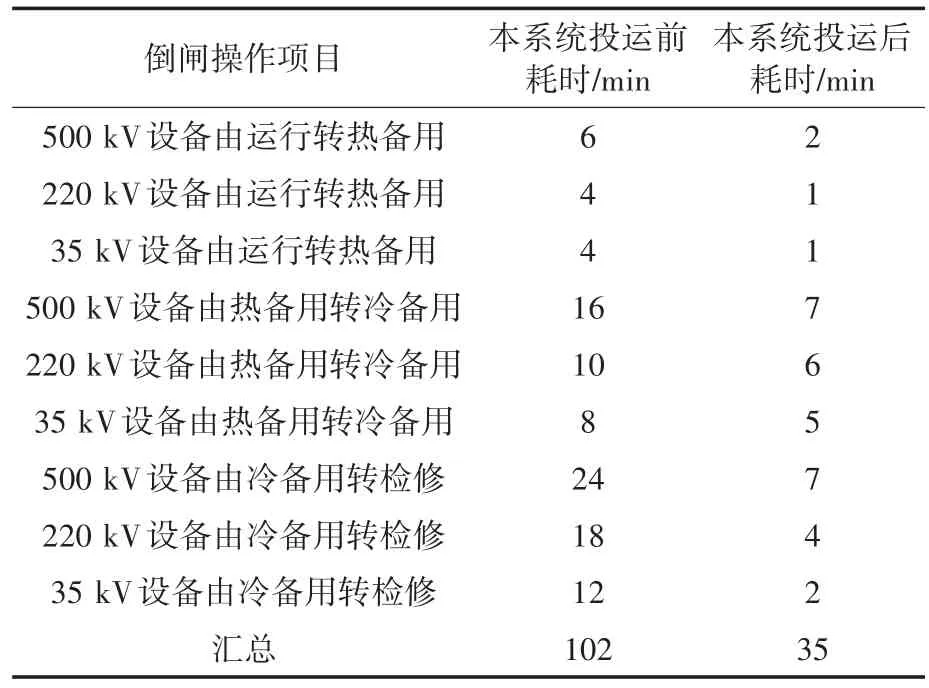
表2 文山站2#主变停电倒闸操作耗时统计表Tab.2 Statistics of outage switching operation time of 2#main transformer in Wenshan substation
由表2中数据可知,安装设备状态智能识别系统前,完成2#主变停电倒闸操作需要两组人员共4人耗时102 min,共计6.8工时;安装设备状态智能识别系统后,完成2#主变停电倒闸操作需要一组人员共2人耗时35 min,共计1.17工时,共节省5.63工时,大大节省了人力,提高了工作效率。
此外,在2#主变及三侧开关设备发生任一异常时,该系统可启动智能巡检,及时推送开关、刀闸设备状态图文信息,为变电部门运维检修提供信息快速报送和检修决策支持,提高了应急响应能力。同时,该系统投运后,操作人员无需在设备现场检查开关、刀闸设备状态,避免了设备短路爆炸造成的人身伤害,保障了人身安全。该系统还实现了定期巡检与自定义巡检功能,进一步节省了人力,同时解决了人工巡检作业引起的巡检质量不高的问题,提升了变电设备运维质量。
4 结论
本文集成应用开关状态综合判断技术、刀闸状态综合判断技术、智能巡检技术和视频联动技术等关键技术,研制了变电站设备状态智能识别系统,通过与SCADA系统的信息交互,实现了变电站开关、刀闸设备状态的远程智能识别。
该系统可在变电设备倒闸操作、日常巡检中代替人工巡检开关、刀闸设备状态,提高了巡检效率和质量,降低了运行人员的劳动强度,保障了人身安全。
该系统可及时发现开关、刀闸设备状态隐患并预警通知运维人员检查消缺,确保了开关、刀闸安全可靠运行,有效地提升了变电站设备智能运维技术水平。
猜你喜欢
科学技术创新(2021年14期)2021-05-28 06:18:46
环球市场(2021年13期)2021-01-16 00:28:43
电子制作(2019年16期)2019-09-27 09:34:50
中国交通信息化(2019年4期)2019-07-13 05:51:34
电子制作(2018年19期)2018-11-14 02:37:04
电子制作(2018年14期)2018-08-21 01:38:16
中国公共安全(2017年8期)2017-10-13 08:12:17
中国公共安全(2017年11期)2017-02-06 05:27:47
办公自动化(2016年18期)2016-12-17 19:32:18
电子测试(2016年8期)2016-07-29 08:28:53
