一类平面分段线性Hamilton系统在线性扰动下极限环个数的估计
2021-12-22 09:36:42赵凌燕李宝毅张永康
天津师范大学学报(自然科学版) 2021年6期
赵凌燕,李宝毅,张永康
(1.空军预警学院,武汉430019;2.天津师范大学 数学科学学院,天津300387)
1 引言和主要结论
分段光滑动力系统不仅能描述某些自然物理过程,而且在机械工程、航空航天等众多领域有广泛应用.平面分段线性系统是一类重要的分段光滑动力系统,对其扰动系统极限环个数的估计受到相关学者的关注.关于平面分段线性系统的研究最早见于文献[1].之后,文献[2-3]证明了当平面被一条直线分为2个区域时,连续分段线性系统最多只有1个极限环.文献[4-8]研究了不连续平面分段线性系统极限环个数的情况.文献[9]研究了当平面被从原点出发的2条射线分为2个区域时,一类平面分段线性Hamilton系统在多项式扰动下极限环的个数.文献[10]证明了当平面被分为4个区域时,一类平面分段光滑线性系统可以存在5个极限环.文献[11]研究了平面被分为2个区域时,Bogdanov-Takens系统在分段n次多项式扰动下极限环个数的上确界.文献[12]研究了一类多项式扰动下分段光滑近Hamilton系统极限环个数的上界.此外,也有研究考虑了一些二次分段系统的扰动问题[13-14].
本文考虑从原点出发的2m-1(m≥2)条射线l0,l1,…,l2m-2将平面分为2m-1个区域,射线lk-1与lk所夹的开区域记为Dk,k=1,2,…,2m-1.令l2m-1=l0,记D1*=D1∪l1,Dk*=Dk∪lk{(0,0)},k=2,3,…,2m-1.考虑如下平面分段光滑Hamilton系统的扰动系统
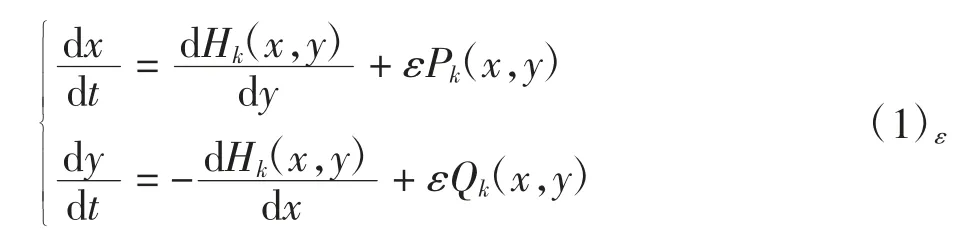
其中:0<ε≪1;Hk(x,y)是Dk*上的二次实系数多项式;Pk(x,y)和Qk(x,y)是Dk*上的一次实系数多项式,

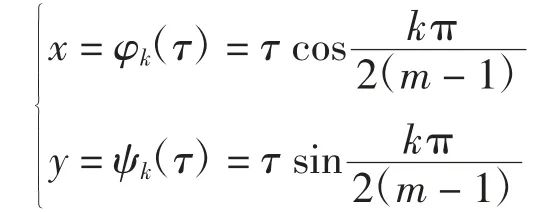
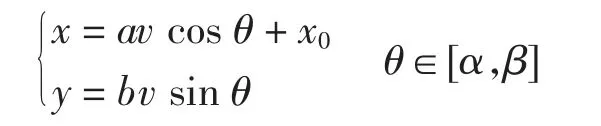
当k=0,1,…,m-1时,射线lk的参数方程为
当k=m,m+1,…,2m-2时,射线lk的参数方程为
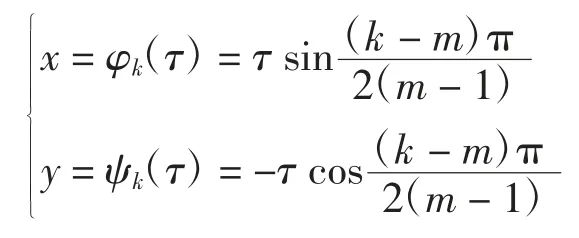
其中τ∈[0,+∞).
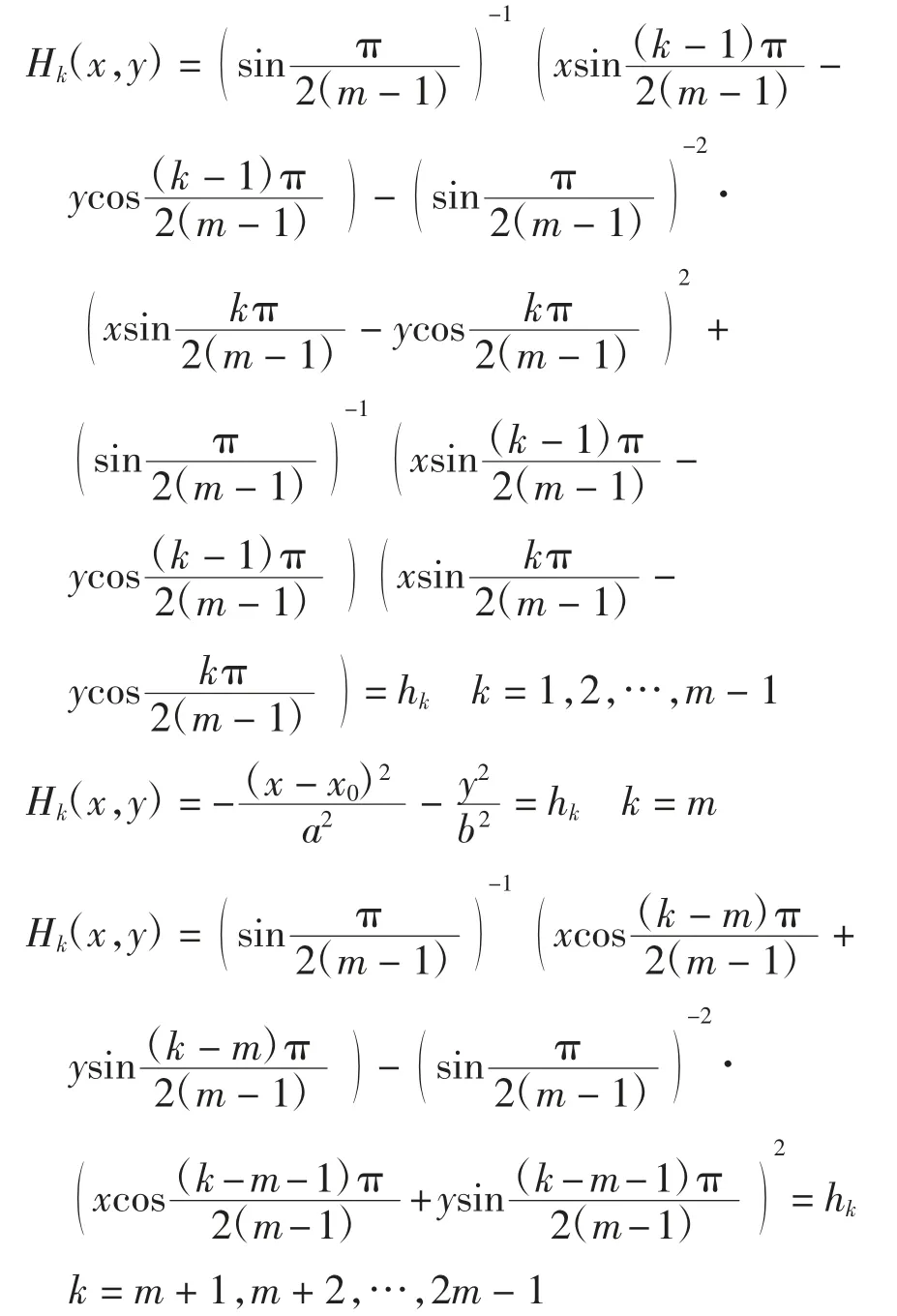
其中:a、b∈R+,x0<0.
当ε=0时,系统(1)0存在2种周期闭轨族,一种是左半平面内的周期闭轨族,另一种是围绕原点的周期闭轨族.当m=2时,2种周期闭轨族的示意图分别见图1和图2.
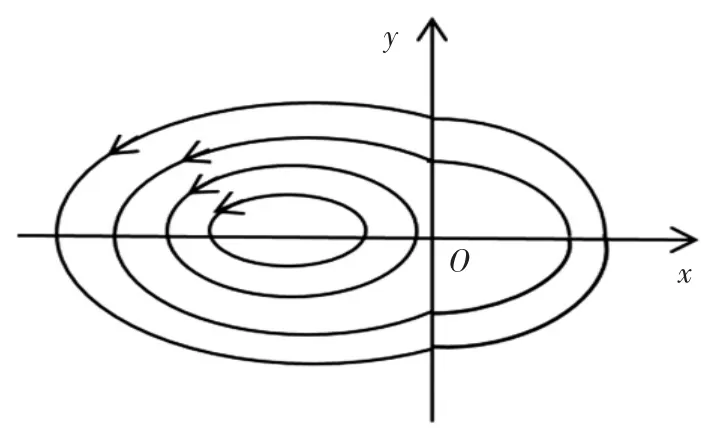
图1 左半平面内的周期闭轨族Fig.1 Periodic closed orbits in the left half plane
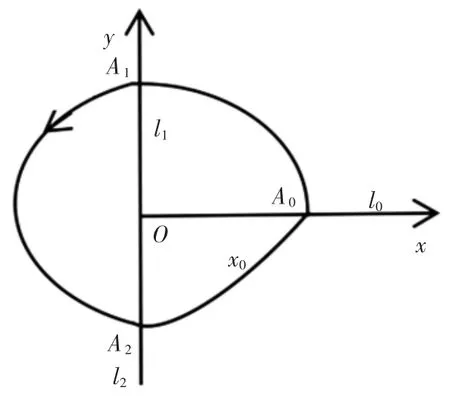
图2 围绕原点的周期闭轨族Fig.2 Periodic closed orbits around the origin
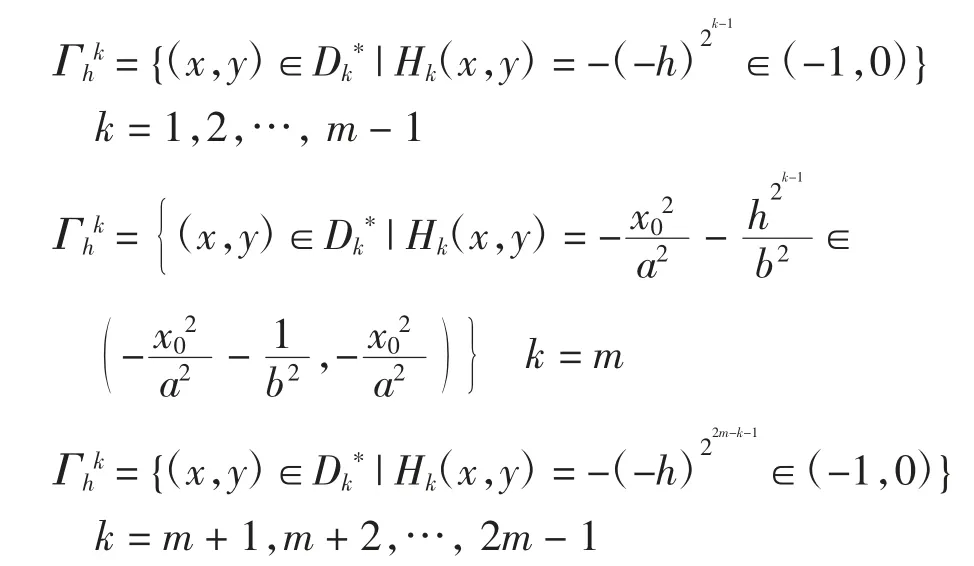
本文考虑围绕原点的周期闭轨族Γh.设
本文得到如下结论.
定理存在一次实系数多项式Pk(x,y)和Qk(x,y),使得分段线性系统(1)ε至少存在3m个极限环,其中:m≥2,k=1,2,…,2m-1.
2 一阶Melnikov函数
由文献[10],利用数学归纳法可证明引理1成立.
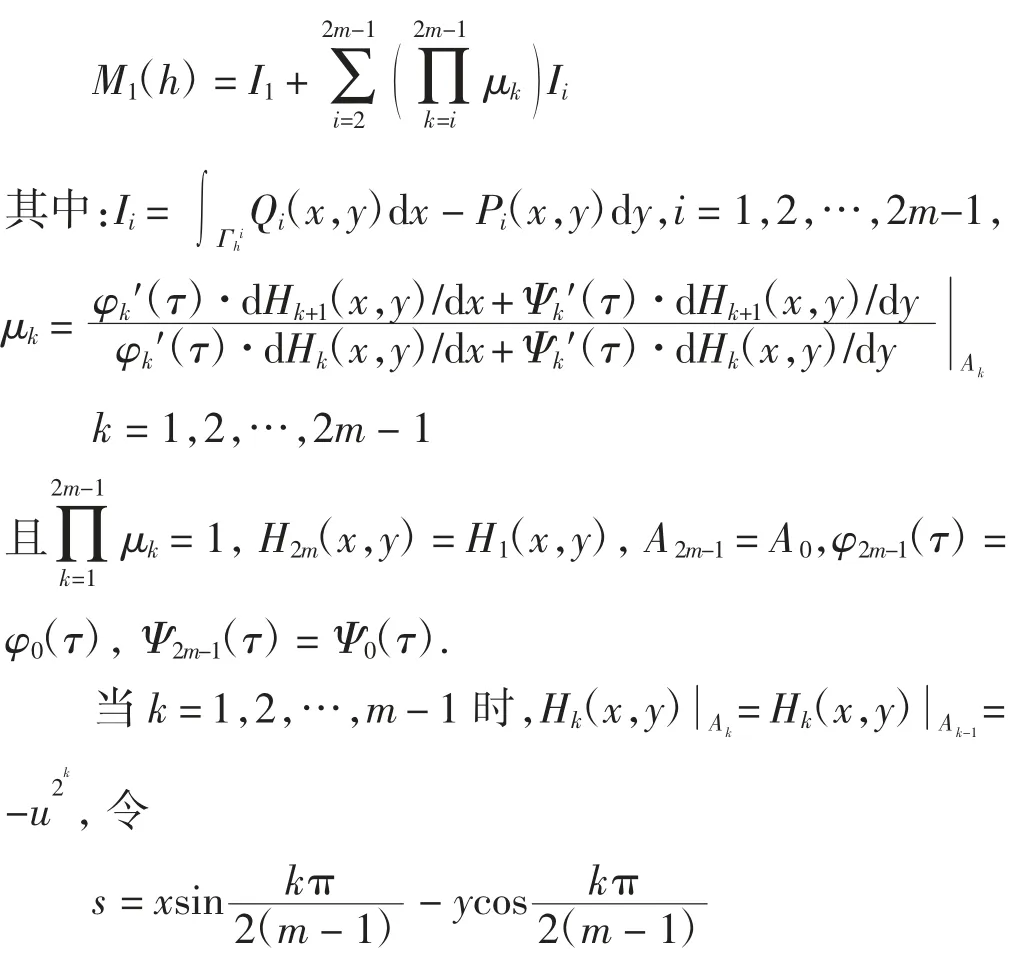
引理1系统(1)ε的一阶Melnikov函数为
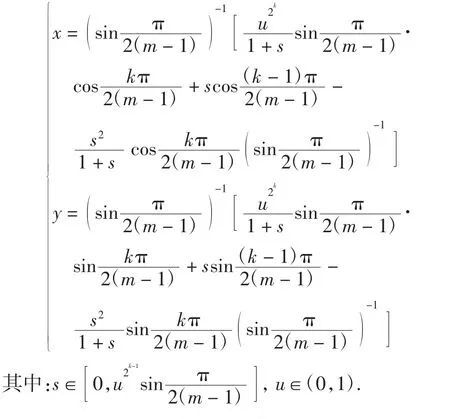
则Γhk的参数方程可写为
引理2对于系统(1)ε,当k=1,2,…,m-1时,
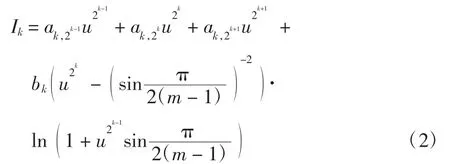
其中:
且ak,2k-1、ak,2k、ak,2k+1、bk对于qk,0、qk,1、qk,2、pk,0、pk,1、pk,2相互独立,
证明当k=1,2,…,m-1时,
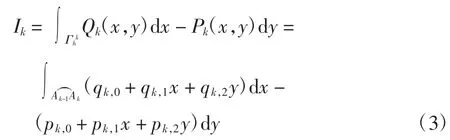
计算得
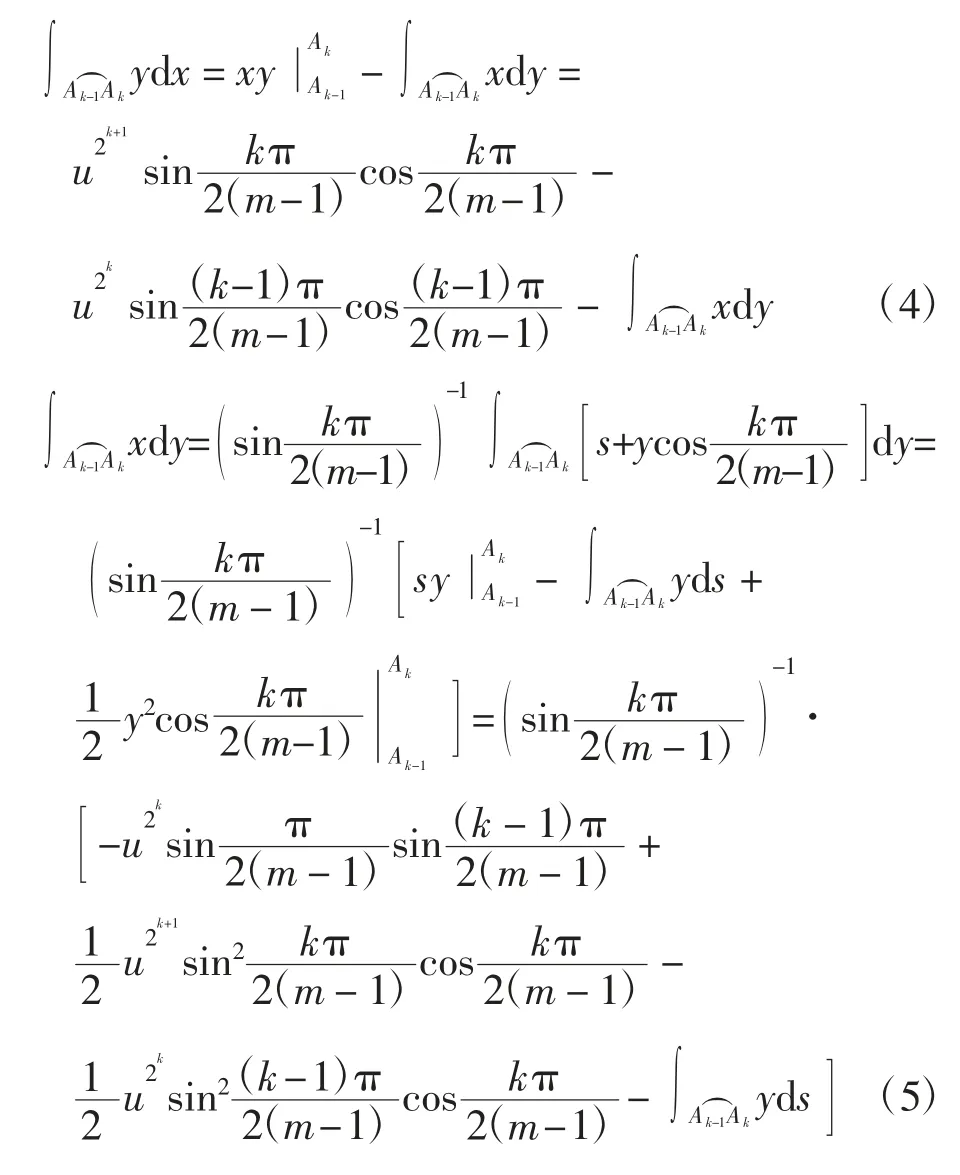
利用Γhk的参数方程可得
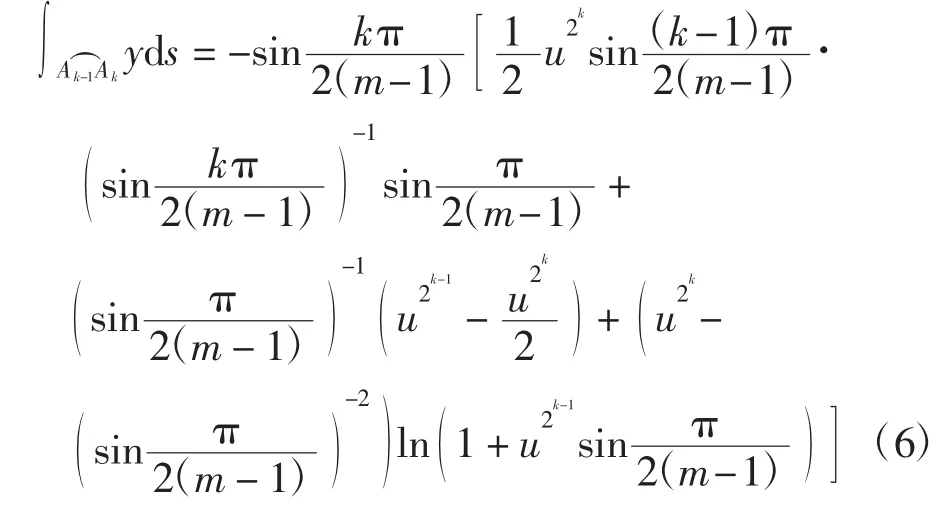
将式(4)~式(6)代入式(3),经化简可得式(2)成立.
其中:α为Γhm位于Am-1(0,u2m-1)时所对应的角,即cosα=为Γhm位于Am(0,-u2m-1)时所对应的角,即
引理3对于系统(1)ε,

其中:am,2m-1=x0qm,2+2pm,0+x0pm,1,bm=-qm,2-pm,1,且am,2m-1、bm对于qm,0、qm,1、qm,2、pm,0、pm,1、pm,2相互独立.
证明
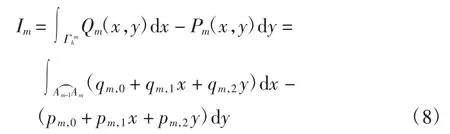
计算得

利用Γhm的参数方程可得
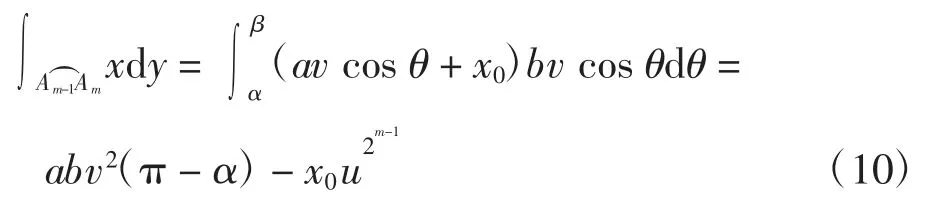
将式(9)~式(10)代入式(8)可得式(7)成立.

则Γhk的参数方程可写为
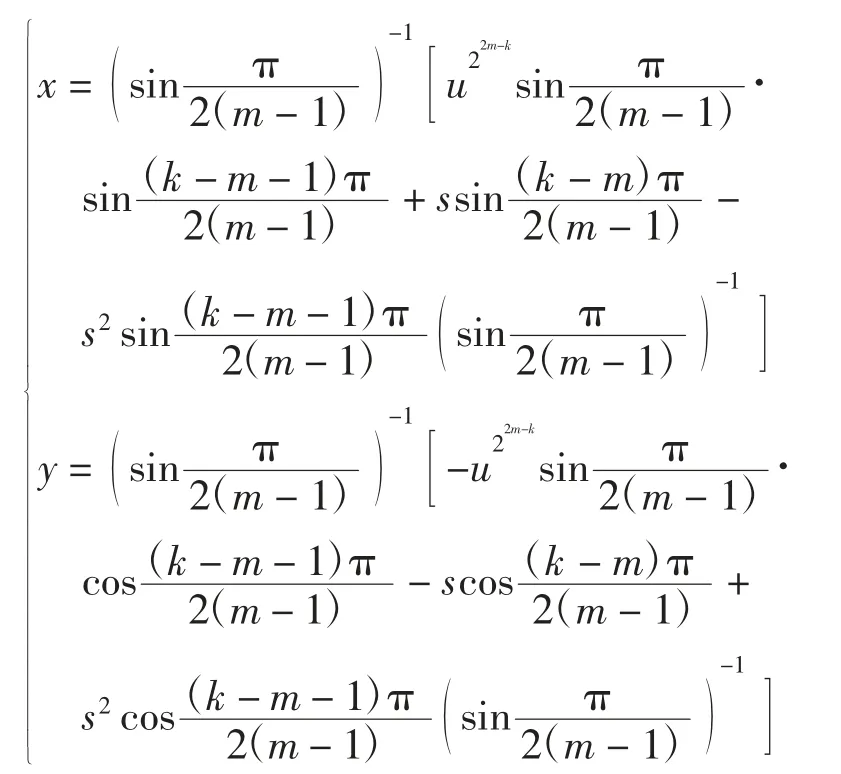
引理4对于系统(1)ε,当k=m+1,m+2,…,2m-1时,
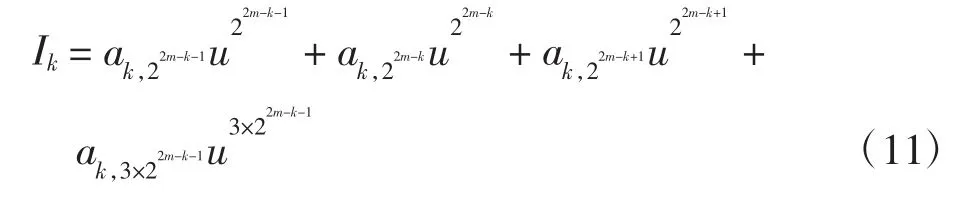
其中:
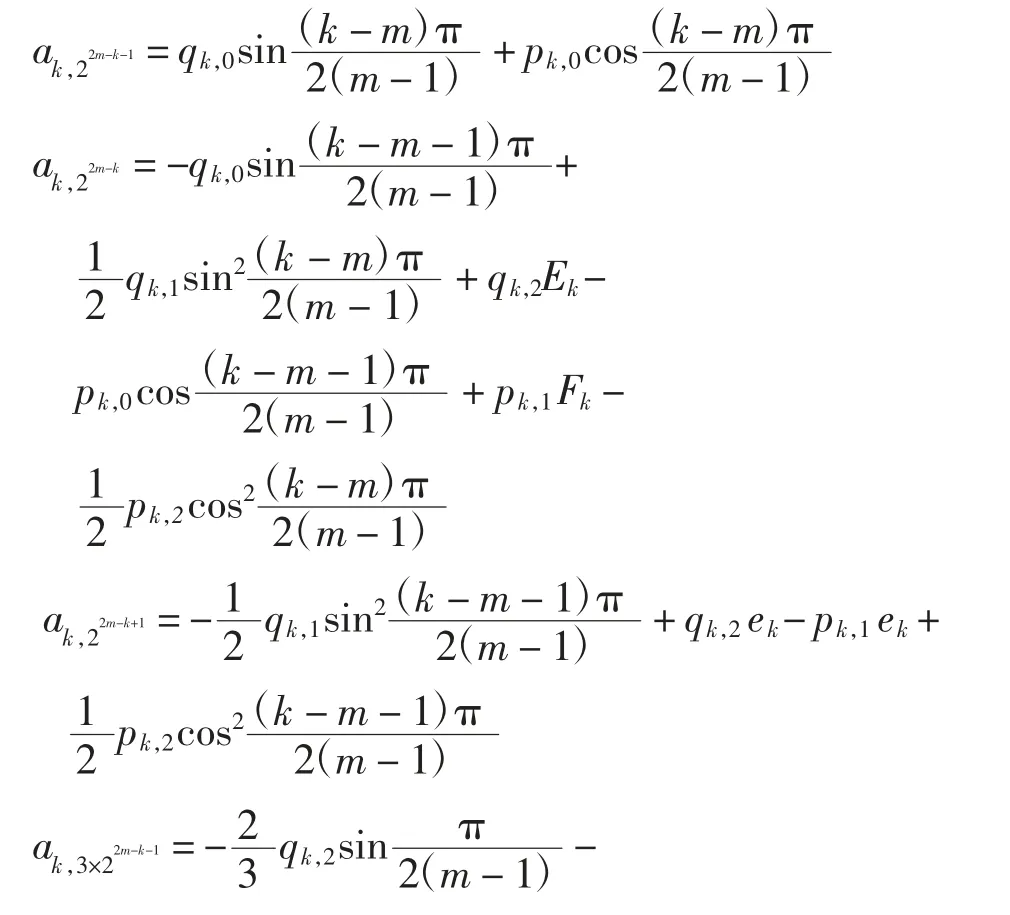
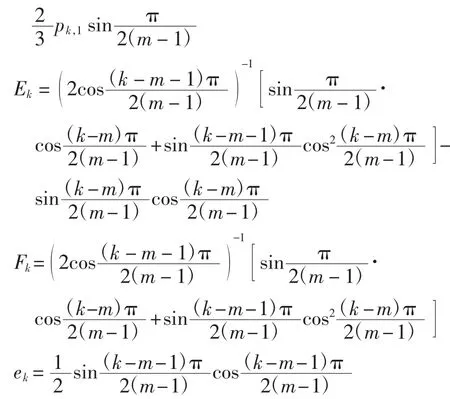
且ak,22m-k-1、ak,22m-k、ak,22m-k+1、ak,3×22m-k-1对于qk,0、qk,1、qk,2、pk,0、pk,1、pk,2相互独立.
证明当k=m+1,m+2,…,2m-1时,
计算得
利用Γhk的参数方程可得
将式(13)~式(15)代入式(12)可得式(11)成立.
3 一阶Melnikov函数变号零点的个数
引理5[9]设f(u)和g(u)是R+上的连续函数,当0<u≪1时,

其中fm·gl≠0.若f(u)在R+上存在k个变号零点,且l<m,则存在实数C,使得F(u)=f(u)+Cg(u)在R+上至少存在k+1个变号零点.
由引理5可得如下推论.
推论[9]设φi(u)是R+上的连续函数,当0<u≪1时,φi(u)=Aiuαi+o(uαi),Ai≠0,α1<α2<…<αk,则存在实数Ci,i=1,2,…,k,使得上至少存在k-1个变号零点.
定理的证明当k=1,2,…,m-2时,计算得
当k=m+1,m+2,…,2m-2时,计算得
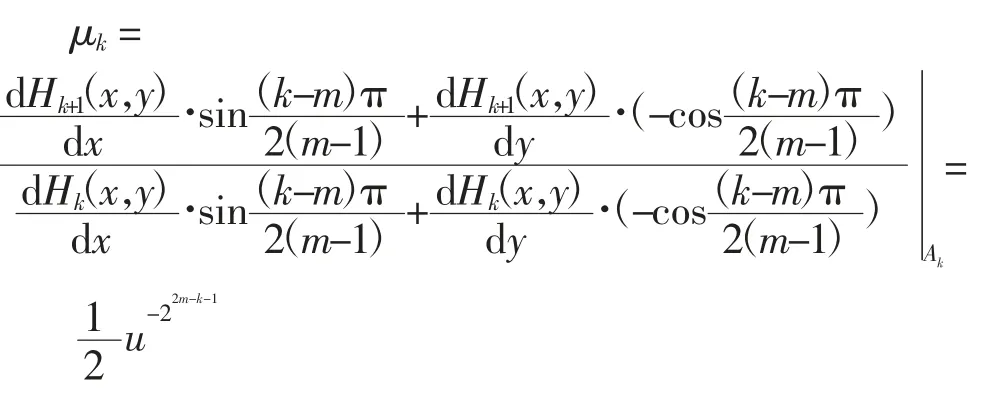
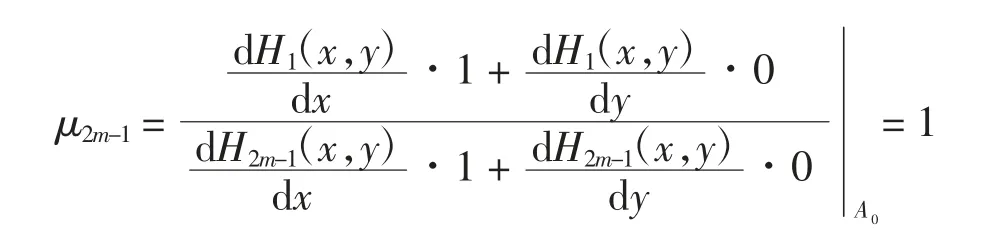
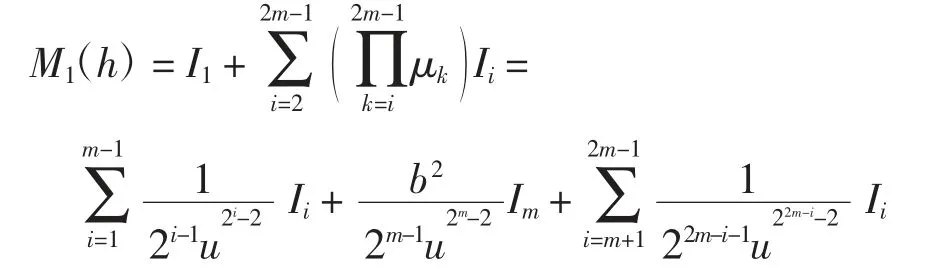
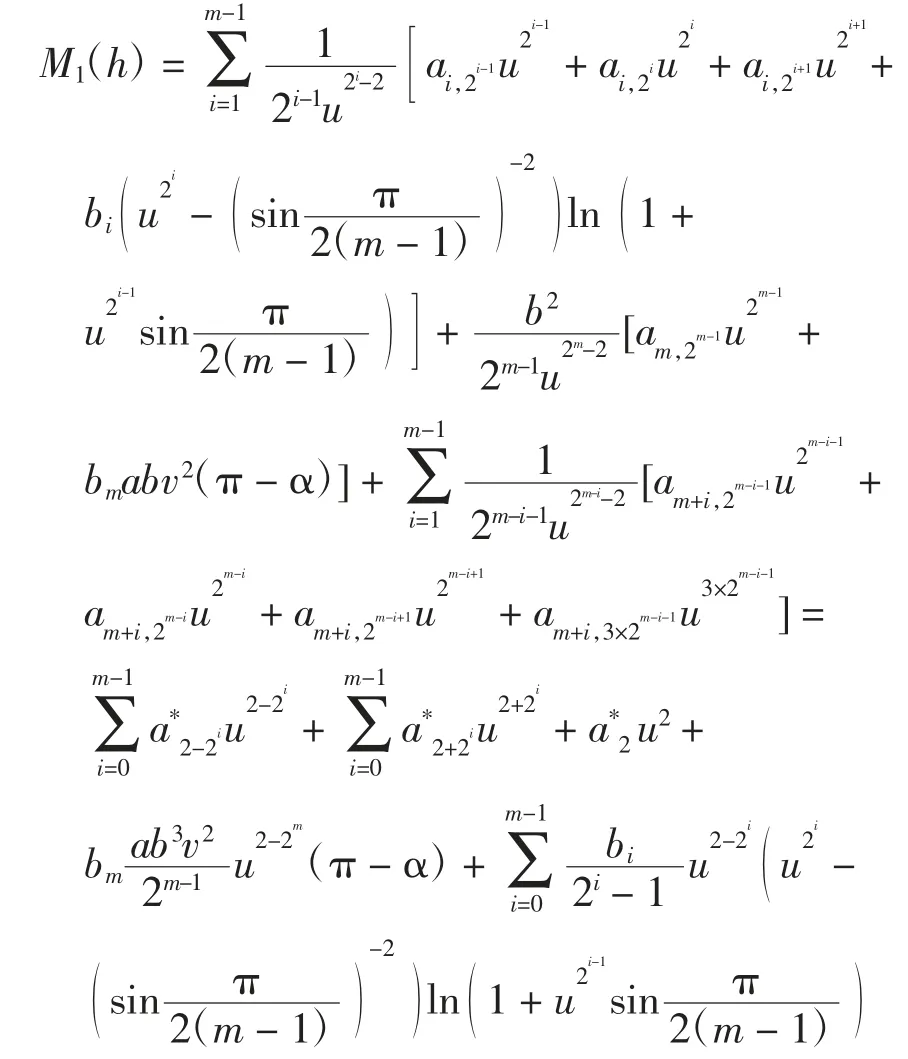
由μk,k=1,2,…,2m-1的计算结果及引理1~引理4可得系统(1)ε的一阶Melnikov函数为
当i=m+1,m+2,…,2m-1时,因为
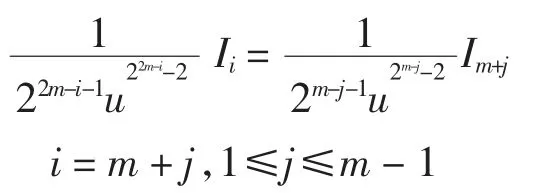
因此有
其中:多项式中u的次数模3同余1或0,
当i=1,2,…,m-1时,由Taylor展开式可得
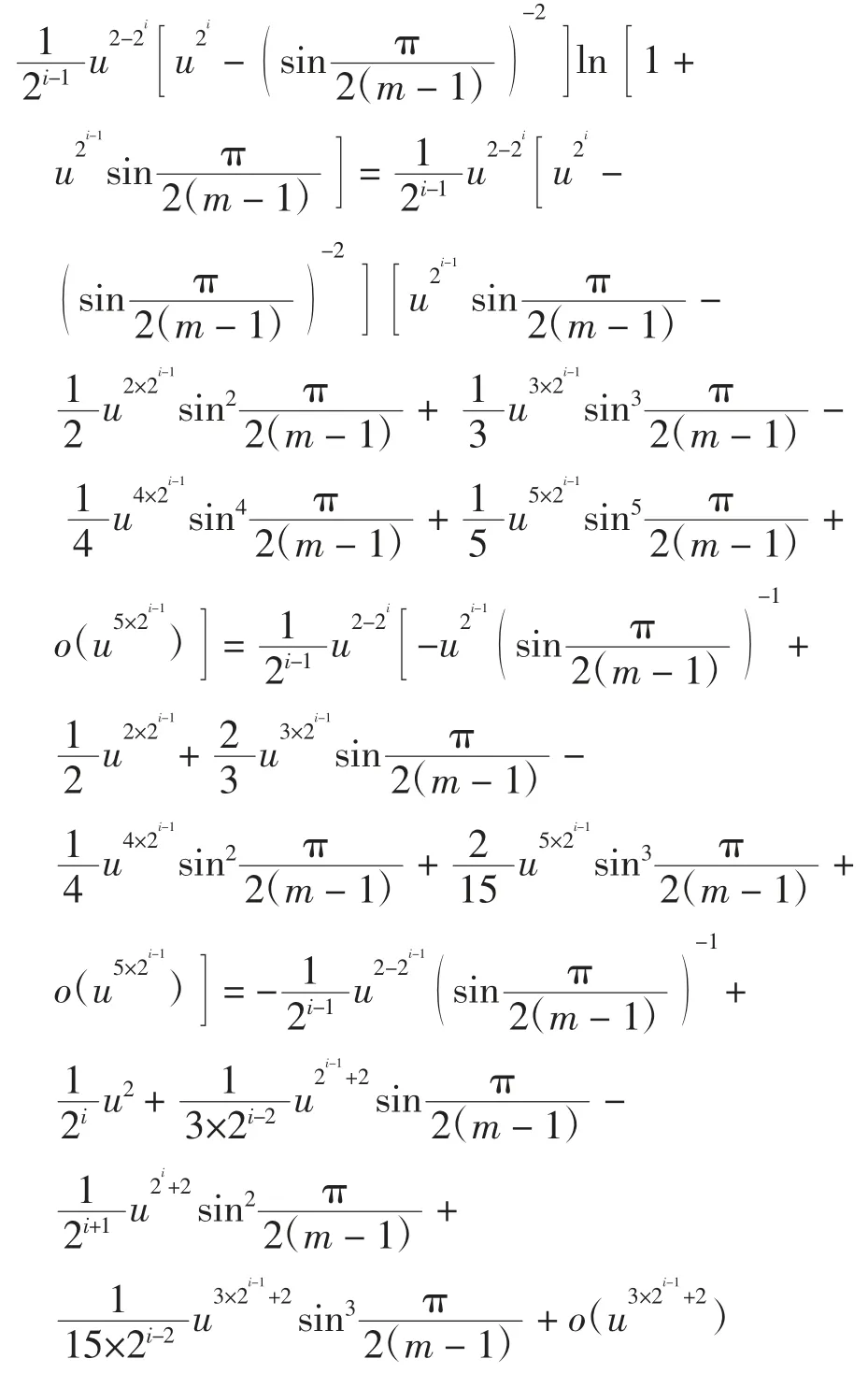
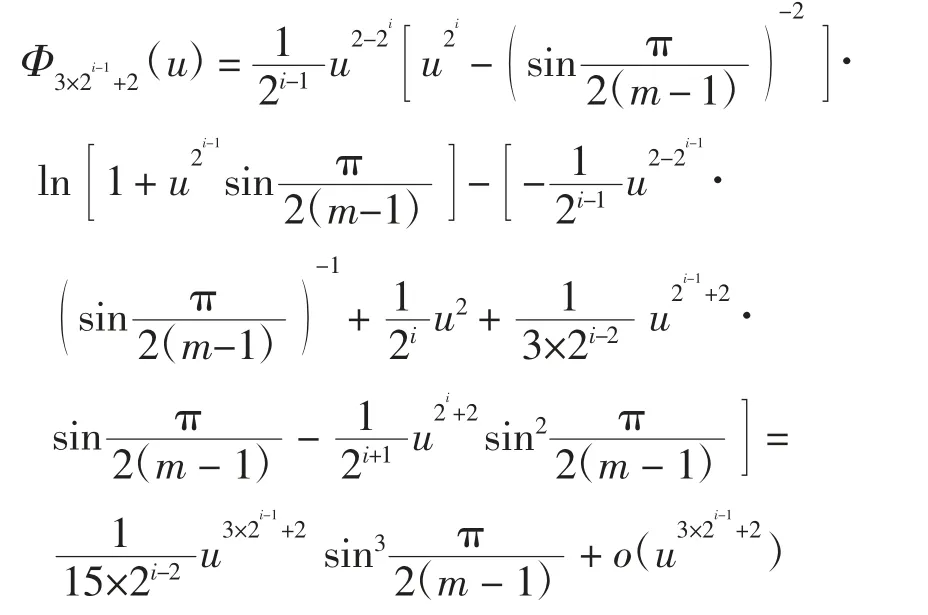
则Φ3×2i-1+2(u),i=1,2,…,m-1中u的最低次数模3同余2.
当u→0+时,因为0+,所以α→0+,故π-α→π-,此时有
综上可得
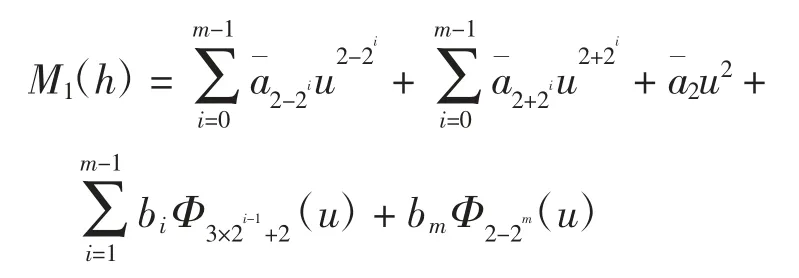
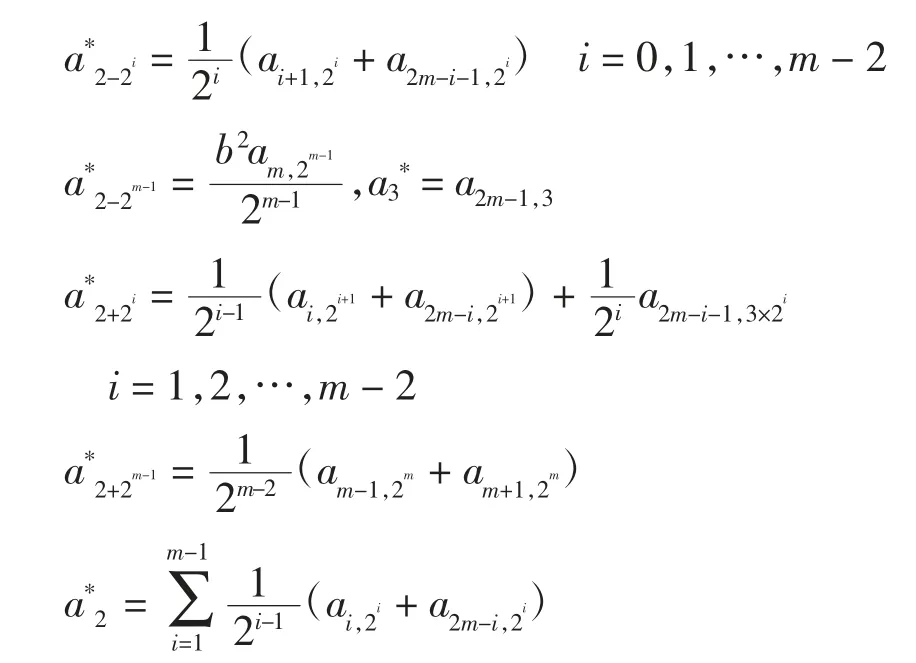
其中:

故M1(h)=0等价于
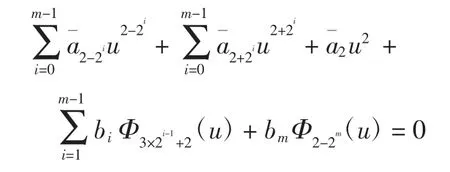
由推论可知,M1(h)至少存在3m个变号零点,即系统(1)ε至少存在3 m个极限环.定理证毕.
猜你喜欢
小学生学习指导(低年级)(2021年9期)2021-10-14 07:57:00
数学物理学报(2021年4期)2021-08-30 08:28:02
中学生数理化·七年级数学人教版(2019年10期)2019-11-25 07:34:00
现代苏州(2019年16期)2019-09-27 09:31:02
小学生学习指导(低年级)(2019年9期)2019-09-25 07:43:28
语言与文化论坛(2019年3期)2019-04-13 02:25:04
小学生学习指导(低年级)(2018年11期)2018-12-03 05:05:00
小学生学习指导(低年级)(2018年9期)2018-09-26 05:59:46
湖北文理学院学报(2017年2期)2017-04-16 05:09:06
太空探索(2016年9期)2016-07-12 10:00:04