基于物联网技术的浮空器远置终端设计
2021-12-22 13:18:48秦慧娴苗景刚张晓荣袁明昱
计算机测量与控制 2021年12期
秦慧娴,苗景刚,郝 勇,张晓荣, 袁明昱
(1.中国科学院 空天信息创新研究院,北京 100094;2.中国科学院大学 光电学院,北京 100049)
0 引言
浮空器是人类社会最早研发和使用的一种飞行器,它的比重轻于空气,主要依靠浮力实现驻空[1],现在已广泛应用于军事、民用等方面。他的技术优势及特点主要包括:能源消耗小,驻空时间长,效费比高;系留气球可以实现较长时间定点驻空,载荷能力强;高空气球飞行高度高,易于快速部署;对流层飞艇起降要求低,载荷能力大,机动性好;平流层飞艇续航持久,升空高度低,覆盖地带范围广[1]。
浮空器在进行高空作业的过程中,需要实时监控诸多物理参数以保障其正常工作,比如飞行时所处环境的温湿度和压强、飞行高度、飞行时的姿态角等,这些参数对保障浮空器正常飞行起着关键的作用。
对这些数据信息的大规模采集,传统上使用线缆连接的方式,即在浮空器表面部署大量的连接线缆,通过连接线缆来进行数据的传输,这样会导致浮空器自身的重量增加并使系统的可靠性受到影响。除此之外,浮空器在进行降落时的操作路径为:地面工作人员操作地面遥控遥测设备—信号到达艇载遥控遥测设备—信号到达吊舱内安全控制设备—连接线缆—火工品切割器。浮空器的安全控制设备一般位于吊舱内,通过布设在浮空器表面的线缆,将设备舱和降落伞相连。电缆的长度一般为10~100 m,这样会大大增加浮空器吊舱的重量以及布线的复杂度,在实际飞行时,由于线缆拉伸、缠绕等问题,容易损耗、拉断线缆,致使浮空器无法安全降落。
远置终端也叫远程终端,是指布局在距离操作系统较远的位置的终端设备,它能够和其他设备一起构成一个系统,从而实现相应的功能,远置终端现已被广泛应用于各种领域,比如温度控制远置终端系统[2]、基于IP核的1553B远置终端应用于航天领域[3]。在本文中,位于浮空器顶端的硬件模块就是远置终端。
改进前后的浮空器布局对比图如图1所示。由图可见,二者最主要的区别就是去掉了布局在浮空器上的线缆,从而大大减小了浮空器的质量负担,并提高了实时传输物理参数时的可靠性,远置终端和主节点之间通过LoRa无线传输的方式进行无线传输并发送相应指令控制排气阀开关。

图1 改进前后浮空器布局对比图
近年来,已有学者将无线传输网络应用到浮空器上,中国科学院的郝勇等人[4]设计并实现了基于ZigBee的艇载无线传感器网络,在一定程度上减少了飞艇上部署的线缆数量,提高飞艇的载荷能力,增加飞艇上数据传输的灵活性。阴启玉[5]等人在无人艇载雷达中用无线传输技术来传输视频。
在应变数据测量方面,现在也有一些专门的测量仪,但是在需要实时采集、传输数据的设备上使用起来并不方便。为解决类似的问题,对于飞艇的蒙皮应变监测也可以使用无线传感器网络[6],与传统的有线监测相比,减轻了繁重的线缆并且可靠性高、易于扩展,并且为了提高传感器的有效使用率,使用相同传感器数量时获取尽可能多的数据信息,还对传感器的布置进行了优化。对浮空器进行分析,有针对性的选用合适的传感器,设计出了基于无线传感网络的蒙皮应变监测系统。
无线传感器网络还可以应用在飞艇的体积测量方面,与传统飞行器不同,对浮空器气囊状态进行实时监测是对飞艇安全保障中重要的一步,因为飞艇的升力主要由气囊中的浮升气体产生的浮力来提供。基于无线传感器的测量方法,克服了传统的布线测量方法带来的浪费飞艇有限载荷,增大飞艇的自身重量,设备维护、检修不方便等问题。在无线传感器网络中,艇体表面布设有众多传感器,通过这些传感器测得的参数进而可以推算出主副气囊的体积,进一步调控飞艇的内外压差,可以达到提高其使用寿命的目的[7]。
1 浮空器远置终端设计的结构及原理
计算机技术、互联网与移动通信技术之后的第三次信息产业浪潮就是物联网[8]。物联网是指生活中的各种物品通过一些信息传感设备,按照双方约定好的协议,把物品与互联网连接起来,互相进行通信的一种网络[9]。基于物联网的浮空器远置终端的核心内容就是无线传感器网络,无线传感器网络属于第四代传感器网络,目前已经是国内外研究人员的研究热点之一,主要优势是数据信息可以实现无线传输,从而建立起无线传感器网络[10]。
基于物联网技术的浮空器远置终端设计分为主节点和终端节点两部分。主节点由无线传输、飞控计算机组成,负责采集数据并通过上位机显示,还通过无线传输方式给终端节点发送控制指令。
如图2所示,远置终端由太阳能自循环系统、传感器、主控单元、作动机构和无线传输模块组成,太阳能自循环系统是各个部分的能量来源,主控单元同样是起到整体控制作用的单片机最小系统,作动机构控制排气阀的开关,无线传输模块实现主节点和终端节点之间的信息传输。

图2 整体设计结构图
2 主要技术路线
现在的无线传输技术有很多,彼此之间都有一些不同。从表1中可以看出,LoRa的传输距离是最远的,可达几千米之远,同时,功耗和蓝牙技术的功耗一样低[11]。LoRa已广泛应用于水表、电表等无线集抄领域[12-14]。

表1 无线通信技术对比表
无线传输过程中容易发生干扰问题, 本文所采用的LoRa扩频技术,数据之间不存在互相干扰的问题[15-18]。借助LoRa通讯的传输距离长、低功耗等特点,将其应用到浮空器上可以大大减少传输线缆的数量,从而减轻了载荷的重量,使得整个系统标准化,让研究人员可以对浮空器进行实时、远程监测控制。
整个传感器网络节点中,能源系统采用太阳能电池板外接锂电池,采用稳压充电的方式,解决浮空器升空作业后的持续供电问题。无线传输传感器节点,主要分为电源供应模块 、MCU单片机模块,传感器和通讯模块,MCU单片机使用STM32L系列低功耗单片机,无线通讯模块负责传感器节点对采集的温度、压差数据与网关交互,采用LoRa无线传输方式无线传输传感器采集的数据。
3 硬件设计
该远置终端的硬件部分主要包括:主体STM32系列单片机、外部温度、压差数据采集传感器、继电器控制部分、通信串口、供电系统。
3.1 主要芯片选择
浮空器在升空后所需的能量均来源于太阳能,白天太阳能电池板可以储存能量,但到了晚上能量只有消耗而没有吸收,因此在远置终端的设计中,需要选用功耗低的芯片以满足远置终端24小时工作的要求。
ST公司推出的STM32L100C6-A,采用ARM公司的Cortex-M3 32位的MCU,32MhzCPU,有3组USART串口,12位的ADC,2组SPI,2组I2C,该芯片满足远置终端的设计所需,与STM32系列其他芯片相比最主要特点是低功耗。
3.2 外部数据采集传感器
为保证长时间并安全可靠的飞行,除了必须使用的外部传感器以外,要尽量简化传感器设备。在浮空器的飞行过程中,需要采集的信息量主要有:气压差、温度。可以通过实时监控这些信息达到监控浮空器的飞行状况,并有效延长驻空时间的目的。本设计选择2种传感器分别为:温度传感器(PT100)、气压差传感器(DS0365)。
PT100器件制作方便,使用简单,而且容易替换[19]。本文中,PT100温度传感器需要和相应放大电路结合使用,而且由于最初采集到的是模拟信号,需经过AD放大电路将其转换成数字信号再输出[20]。
INA326是一种常用的仪表放大器芯片,它的内部结构是拓扑结构,可以实现电源正负限输入、输出。
温度传感器采集接口如图3所示,MR30-F外接PT100温度传感器,ADC_IN1与CPU相连,采集到的数据经过全桥放大电路放大后,可被主体单片机读取。

图3 温度传感器采集接口原理图
压差数据采集方面使用DS-0365压差传感器,其低电源电压特性允许将其集成到各种过程控制和测量系统中,并直接通过I2C串行通信总线与主体单片机相连。
3.3 继电器控制部分
如图4所示,继电器控制部分主要由74HC14反向器、ULN2003AN晶体管阵列、两个TLP281光耦组成。74HC14反相器的耗电量低并且速度快,他的一个输入端与主体单片机相连,该输入端对应的输出端与ULN2003AN相连来驱动继电器,74HC14的内部构造是实现了6路施密特触发反相器,将缓慢变化的输入信号转换成清晰、无震颤的输出信号。ULN2003AN是一种耐压性强的大电流复合晶体管阵列,内部有7个硅NPN复合晶体管,是常用的大电流驱动阵列,常用于单片机等控制电路中,也可直接驱动继电器。TLP281光耦以光作为媒介来传输电信号,可以实现光—电—光的控制。

图4 继电器控制部分
3.4 通信串口
串口是节点和用户电脑交互的一种工具,运用串口可对无线传感器网络节点进行调试以及采集信息的查看与输出[4]。
STM32L100C6-A具有3个支持多种通信协议的强大USART,2个16 Mbit/s的SPI接口,2个I2C,本设计有一路JTAG,用于烧写代码和节点的调试。
3.5 电源系统
浮空器上大多使用锂电池供电,若无线传感器网络节点的电源模块直接利用锂电池供电设计,会受限于锂电池电量的大小,当电量下降到一定程度时将无法工作,而增大电池容量则又带来了质量代价,本设计通过布局在浮空器顶部的太阳能电池板收集太阳能并储存在锂电池中。本设计使用稳压充电,因此太阳能电池板直接通过太阳能管理器外接锂电池即可,锂电池外接升压模块和降压模块,升压至24 V给作动机构供电,降压至5 V给继电器控制部分的光耦供电,降压至3.3 V给芯片供电。升压至24 V和降压至5 V的电压转换方式分别使用锂电池外接升压模块和降压模块,降压至3.3 V则使用LT1764EQ-3.3正向低压降稳压器给芯片供电。
浮空器驻空时间长短不一,多者比如临近空间飞艇有时需要在空中驻留几个月之久,因此在对其进行供电时,势必要考虑其可持续工作的能源问题。太阳能电池是通过光电效应吸收光能并将其转化成电能的重要器件,起到整个系统的能量输入的作用,他最重要的特性之一就是其输出功率。太阳能电池是一种典型的非线性元器件,其输出电流、电压都是非线性的,并且它的输出功率同时受到温度和光照强度的影响。为了更好地分析其输出特性曲线,通过Matlab仿真的方式,可得到太阳能电池的输出特性曲线如图5所示。
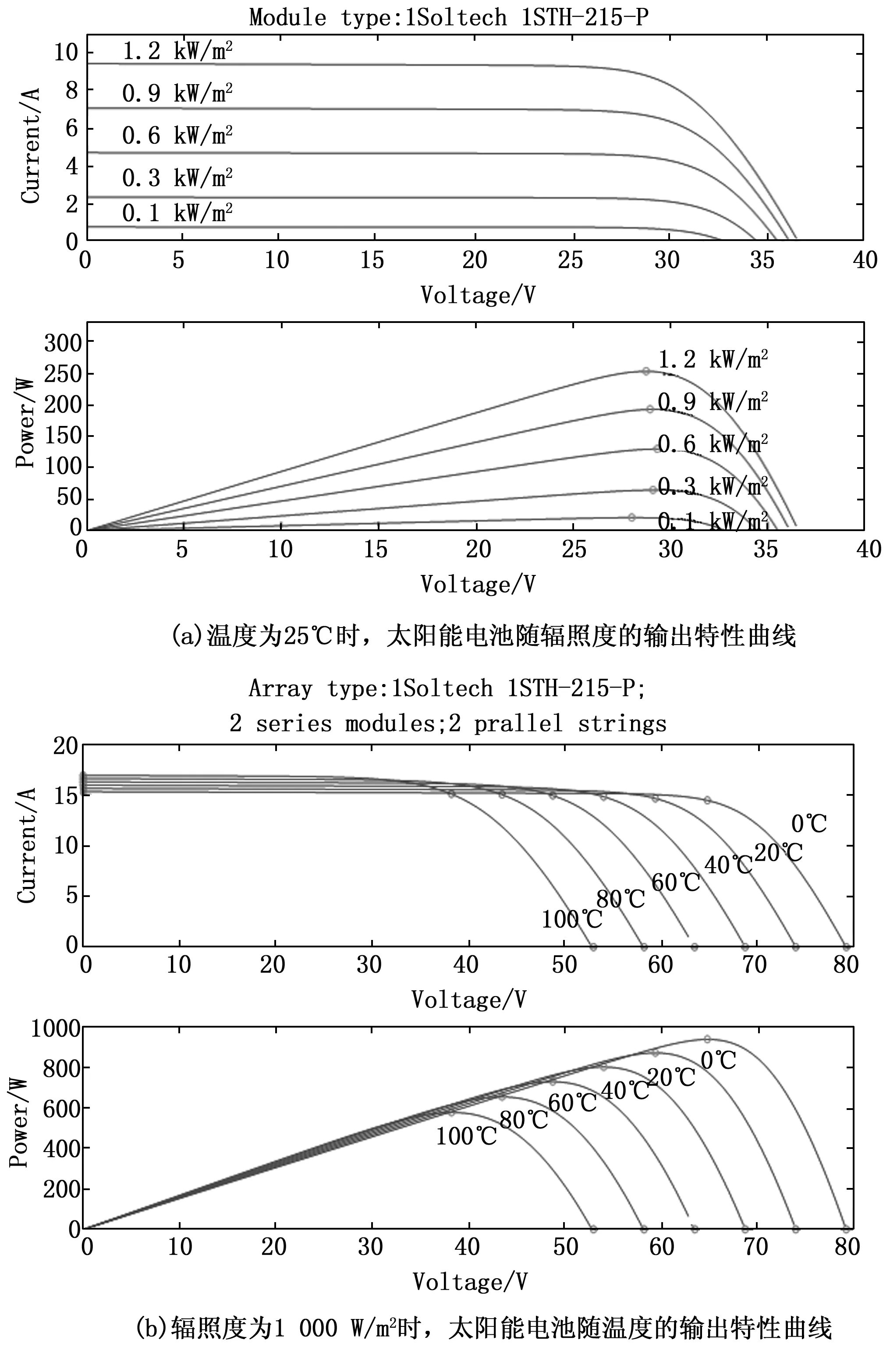
图5 太阳能电池输出特性曲线
直接受温度影响的是太阳能电池的开路电压,开路电压随温度的升高而降低;辐照度直接影响的是太阳能电池的短路电流,短路电流随辐照强大的增大而增大;除此之外,太阳能电池的输出电流会随着输出电压的增大而减小,因此,在一定条件下,太阳能电池达到最大功率点(MPP, maximum power point)时,输出功率最大。太阳能电池自供电系统中的MPPT控制器负责将太阳能电池的输出功率最大化,给后续负载提供能源。
4 实验结果与分析
如图6所示,软件设计方面的主函数流程主要是:首先需要对各个硬件模块进行初始化设置,并使远置终端节点和主节点具有相同的波特率,这是实现数据传输的必要条件;然后采集传感器数据并将温度传感器、压差传感器采集的数据经过串口发送给单片机,之后通过LoRa协议将数据传给网关;飞控计算机和主节点相连,最后通过飞控计算机上的串口助手来读取传感器数据并远程控制排气阀开关。

图6 传感器节点软件主函数流程图
在实际实验时,按照以上操作原理,首先将主节点和终端节点的LoRa模块进行配置,使其具有相同的波特率,然后将远置终端硬件电路板和主节点均上电,此时电源部分经过升压模块和降压模块后分别输出24 V、5 V、3.3 V的电压,用来给作动机构、继电器控制部分、主芯片供电,此时在电脑端打开串口助手,可以读取传感器无线传输下来的数据以及实现远程控制排气阀开关的功能。
如图7所示,上位机显示的Pressure和Temperature都是通过DS-0365读取出来的,分别是压差数据和芯片内部的温度,Temperature2是PT100温度传感器读取的环境温度。并且通过串口助手发送“ON”或者“OFF”可以实现远程控制排气阀的开关。

图7 上位机显示图
远置终端所选用的LoRa模块的工作环境温度范围为-50~50 ℃,系统采用超低功耗设计,采用定时的模式,在一定时间内进行一次数据传输,在一定程度上相应减少了功耗。除此之外,还要保证数据传输的可靠性,对此进行了测试。将发送端和接收端的波特率均设置为115 200,进行数据传输测试,传送1 000包数据,每包加上时间戳,并且对每包进行编号0 001~1 000,这样在接收端,可以根据序号判断丢失的包数。通过几次试验,平均每发送1 000包数据,丢失的包数小于7,数据传输较为可靠。并且在试验时将两节点相距50 m、100 m、200 m进行了测试,而在实际飞行时,远置终端与主节点的距离即囊体顶部到吊舱的距离,小于200 m。由此验证了此无线传输网络可以较为可靠地进行数据传输和无线控制。
5 结束语
本文以LoRa无线传感器网络的基本原理为基础,针对浮空器这一特殊应用环境,设计出了适合浮空器使用的无线传感器网络节点。并实现了从终端节点实时向主节点传输传感器所采集数据的功能以及远程控制排气阀开关的功能,并且可靠性较高,可以在足够远距离下实现无线传输的功能。与传统的浮空器数据传输方式相比,大大减小了浮空器在进行高空作业时的质量负担,提高了浮空器的有效载荷能力以及作业时的可靠性,为浮空器的信息传递提供了保障。
猜你喜欢
北京航空航天大学学报(2022年5期)2022-06-06 09:26:48
无人机(2020年1期)2020-07-20 17:42:29
汽车电器(2019年9期)2019-10-31 07:51:08
太空探索(2016年12期)2016-07-18 11:13:43
现代防御技术(2016年1期)2016-06-01 12:13:27
中国品牌(2015年11期)2015-12-01 06:20:54
百科探秘·航空航天(2015年12期)2015-11-07 07:05:51
百科探秘·航空航天(2015年11期)2015-11-07 07:05:30
百科探秘·航空航天(2015年10期)2015-11-07 07:05:09
电子设计工程(2015年8期)2015-02-27 12:05:18