
基于ANSYS的工业机器人PMSM转矩波动抑制技术
2021-12-22 13:18李俊
计算机测量与控制 2021年12期
李 俊
(广西警察学院 信息技术学院,南宁 530022)
0 引言
PMSM(permanent magnet synchronous motor)是通过永磁体产生励磁,内部镶嵌叠片,而叠片结构是由定子和永磁体构成,这种结构简单,构成方法简单,在提高电机运行可靠性的同时,可以减少电机运行能耗[1-3]。伴随着永磁材料特别是稀土方面永磁技术生产的进一步提高,PMSM能有效地提高工作效率,增加转矩惯量,同时又增加了功率密度,使其广泛应用于各种工业电源系统,从现代船舶、潜艇等推进系统,到电梯、机床、传动等动力系统,再到家电、机器人等设备[4-5]。一般来说,控制PMSM运转的技术主要有3种,变压变频控制技术是通过电机电压频率改变的方法来调节转矩;矢量控制技术能够将变量转变为相量形式控制转矩;直接转矩控制技术是通过调节控制角度来调节转矩的[6-8]。
为保证在最大负载下,转矩控制系统具有足够的供电电压,变频器还需要有足够的电压余量,所以当负载增大时,功率也会随之降低,由此也调节了PMSM转矩。直接转矩控制技术近年来得到了很好的应用,其技术难点是如何利用脉冲抑制转矩技术直接控制转矩,在不影响系统正常运行的前提下,降低操作难度,同时减小转矩波动,减少磁链波动对调试转矩的影响。因此,在PMSM直接转矩控制技术和转矩优化的基础上进行了研究,提出基于ANSYS的工业机器人PMSM转矩波动抑制技术。使用ANSYS有限元分析方法可以对微分方程进行离散,并编制对应的计算程序,通过计算机辅助进行求解,可以简化复杂的数学计算问题,降低计算量,从而提高计算效率和精度。
1 工业机器人模态结构分析
对于工业机器人的模态结构分析,需要通过分析软件将其尺寸臂结构转换成悬臂梁结构形式,并对其共振效应进行详细分析。为此,采用基于ANSYS的软件分析方法,处理模型问题,借助自动协作分析功能,避免模型导入过程中数据丢失、混乱或重复出现[9-10]。
工业机器人模态结构如图1所示。
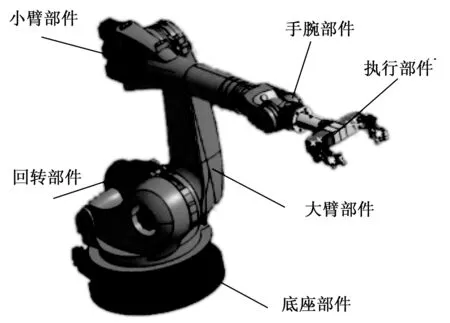
图1 机器人模态结构
根据图1可知,在工业机器人的底部是一个底座部件,上面安装有工业机器人机械臂的旋转部件,并与机械臂的大臂部件相连接,它携带除底座部件外的所有部件,并带动工业机器人的机械臂移动[11];大臂部件的另一端连接一个小臂部件,而小臂部件的另一端连接手腕,以完成抓取的动作。所以对工业机器人机械臂大臂静态建模的研究具有重要意义。
1.1 传动装置
自由度指的是决定工业机器人末端执行部件的空间位置和形状的独立运动参数[12-13]。机械臂的工作形态决定了其自由度的大小,自由度越大,越接近于人工操作,运动愈灵活,通用性愈好,因此结构愈复杂,控制愈难,刚度亦愈差,因此,选择合理自由度,是设计工业机器人目前亟需完成的任务。自由度选择是由传动装置决定的,其结构如图2所示。
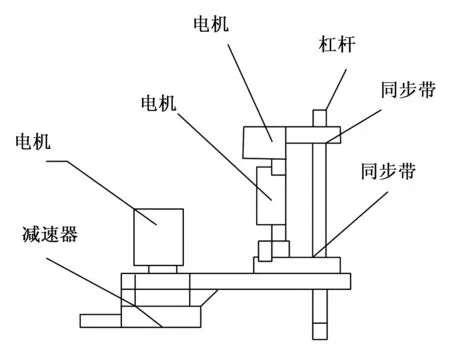
图2 传动装置
由图2可知,传动机制是由电机、杠杆、同步带、减速机构等组成,减速机构是一种全封闭曲柄差动轮系统,该系统由摆线针轮组成,体积小,传动效果好,能有效地提高传动精度,适合高速运行和载重的场合,因此,适合航天航空、船舶载物领域;采用高强度轻铝合金作为机械手的主要材料,可降低工业机器人的质量,设计中空结构可降低机器人的惯量[14-15]。为了实现机器人模块化设计目的,需设计关节驱动装置,增加零件应用广泛性。
1.2 腕部驱动结构
机械手臂的腕式驱动由底座、大小机械臂和端部机械装置组成,底座负责连接工业机器人的肩关节,端部机械臂由肩关节带动大小机械臂运动,端部机械装置由旋转器和执行动作两部分组成,用于工业机器人方向调整。机械手臂的腕部驱动可以根据任务类型的要求,装配不同的末端执行机构,具有很强的操作能力,可以精确地抓住目标[16]。建立基于 ANSYS的软件分析模型,可以对机器人的大小臂、腕部关节的实际运行状态进行实际仿真分析。
2 工业机器人静力分析
2.1 PMSM转矩波动惯量及力矩分析
绕机械臂关节轴承的转动惯量:
(1)
可得出机械臂所需起动转矩为:
(2)
公式(1)和(2)中,m1表示大机械臂质量;m2表示小机械臂质量;m3表示手腕质量。l1表示大机械臂距离工业机器人重心的距离;l2表示小机械臂距离工业机器人重心的距离;l3表示手腕距离工业机器人重心的距离。JG1表示大机械臂绕轴转动惯性度量;JG2表示小机械臂绕轴转动惯性度量;JG3表示手腕绕轴转动惯性度量,在垂直平面内做直线升降运动[17]。
由上述公式可以看出,转矩脉动是以许多电机设计的参数为基础,转轴以周期增大或减小转矩的方式来操纵机器人动作。机器人行动的最大转矩和最小转矩之差,超过一整圈时,会以百分比来表示,这一测试需要实时记录转矩和转速数据。
2.2 PMSM工作流程
PMSM励磁线圈产生的直流电流在不同极性间的流通,形成了励磁磁场,而感应电动势或电流的有效载体主要是电枢线圈,由于电枢绕组与主磁场之间存在一定的相对剪切运动,因此在电枢绕组内部,电势呈现周期性变化[18-19]。引线完成后,可提供 PMSM稳定交流电流。在旋转磁场中,当电磁铁的极性相间交变时,电枢线圈保证三相对称。
3 基于ANSYS的PMSM转矩波动抑制技术研究
3.1 ANSYS软件
ANSYS属于大型通用类有限元分析软件,该软件具备高效的前、后处理功能,在结构、电磁、热分析等领域中广泛应用。ANSYS有限元分析软件程序库能够有效展现多种线性和非线性材料,利用参数快速实现相关模型的构建,便于输入与调整数据,适用于求解PMSM直接转矩控制。
PMSM转矩波动抑制有限元分析主要是对磁链矢量方向和逆时针方向构成的同步旋转坐标系中的转矩方程进行计算,实现PMSM电机转子自动旋转。运用ANSYS有限元分析软件中宏命令,计算PMSM电机电磁转矩、磁链和转动力矩,从而有效提高计算效率。
3.2 构建PMSM数学模型
PMSM结构如图3所示。

图3 PMSM结构
由图3可知,PMSM是一个非多线、复杂的系统,直接分析所有的变量较为困难,所以通常在做电磁分析的过程中,普遍将其简化为一种理想模型,对于以下模型有:
1)三相定子绕组的接线方式为对称接线,感应电动势呈正弦分布;
2)PMSM工作时,绕组电磁芯体饱和度和涡流引起的损耗问题被忽略;
3)忽略各种谐波;
4)转子进行无阻尼绕组。
在此基础上,提出了一种两相静止状态的 PMSM模型,如下所示:
(3)
公式(3)中,uα,uβ分别表示在α、β时的定子电压分量;iα,iβ分别表示在α、β时的定子电流分量;ψα,ψβ分别表示在α、β时的定子磁链分量;Rs表示定子绕组相阻。电磁转矩方程为:
(4)
电机机械运动方程为:
(5)
公式(4)和(5)中,Te描述了电动机转动时,各极磁通产生的转动力矩;P0代表了三相交流电动机在绕组时每一次产生的磁极数目,磁极对数越多,电动机转速越低,转矩越大;Tl表征电动机起动瞬间的转矩;J代表刚体绕轴后的惯量;ωr表示绕组频率;B代表额定负载阻抗与功率放大器阻抗之比,此值越大电阻越小。
3.3 PMSM直接转矩控制技术原理
基于ANSYS的工业机器人PMSM转矩波动抑制方法,主要是利用电磁变换将PMSM模拟成直流电机,获取定子磁链和转子磁链矢量关系,运用ANSYS有限元分析软件中宏命令,计算磁链矢量方向和逆时针方向构成的同步旋转坐标系中的转矩方程,得到PMSM磁通产生的转动力矩。设置PMSM为电压激励方式,通过傅里叶变换模拟PMSM转矩波动曲线,计算PMSM转矩波动幅度,引入负载角,结合直接转矩控制,实现PMSM转矩波动抑制。PMSM转矩波动抑制流程原理如图4所示。

图4 PMSM转矩波动抑制流程原理图
由图5可知,其中,将O作为原点坐标;A、B、C分别表示空间直角坐标系中的各个坐标点;ψ、β、u、d、i、q分别表示不同方向矢量线;α、β表示矢量角;δ表示为负载角。运用ANSYS有限元分析软件中宏命令,计算同步旋转坐标系(坐标轴由磁链矢量方向和逆时针方向构成)中的转矩方程为:

图5 磁链矢量关系图
(6)
公式(6)中,ψs表示定子绕组匝链的磁通,ψf表示转子绕组匝链的磁通,把磁力线的方向接成一反一正一反一正的方式;Ld表示永磁同步电机直轴电感,Lp表示永磁同步电机交轴电感。
针对由高强度合金钢整块锻造而成的隐极式PMSM,永磁同步电机直轴和交轴电感大小一致,由此可得到电动机转动时,各极磁通产生的转动力矩Te:
(7)
利用ANSYS有限元分析软件,在仿真过程中,设置PMSM为电压激励方式,傅里叶变换模拟PMSM转矩波动曲线,减小外界干扰,计算PMSM转矩波动幅度表示为:
(8)
通过上述步骤,引入负载角将其与直接转矩控制相结合来改善电机的运行性能,用于拓展优化空间电压矢量值,减小转矩和磁链波动影响,由此实现PMSM转矩波动抑制。
4 实验分析
为了验证基于ANSYS的工业机器人PMSM转矩波动抑制技术合理性,在ANSYS有限元分析软件中建立有限元分析模型如图6所示。
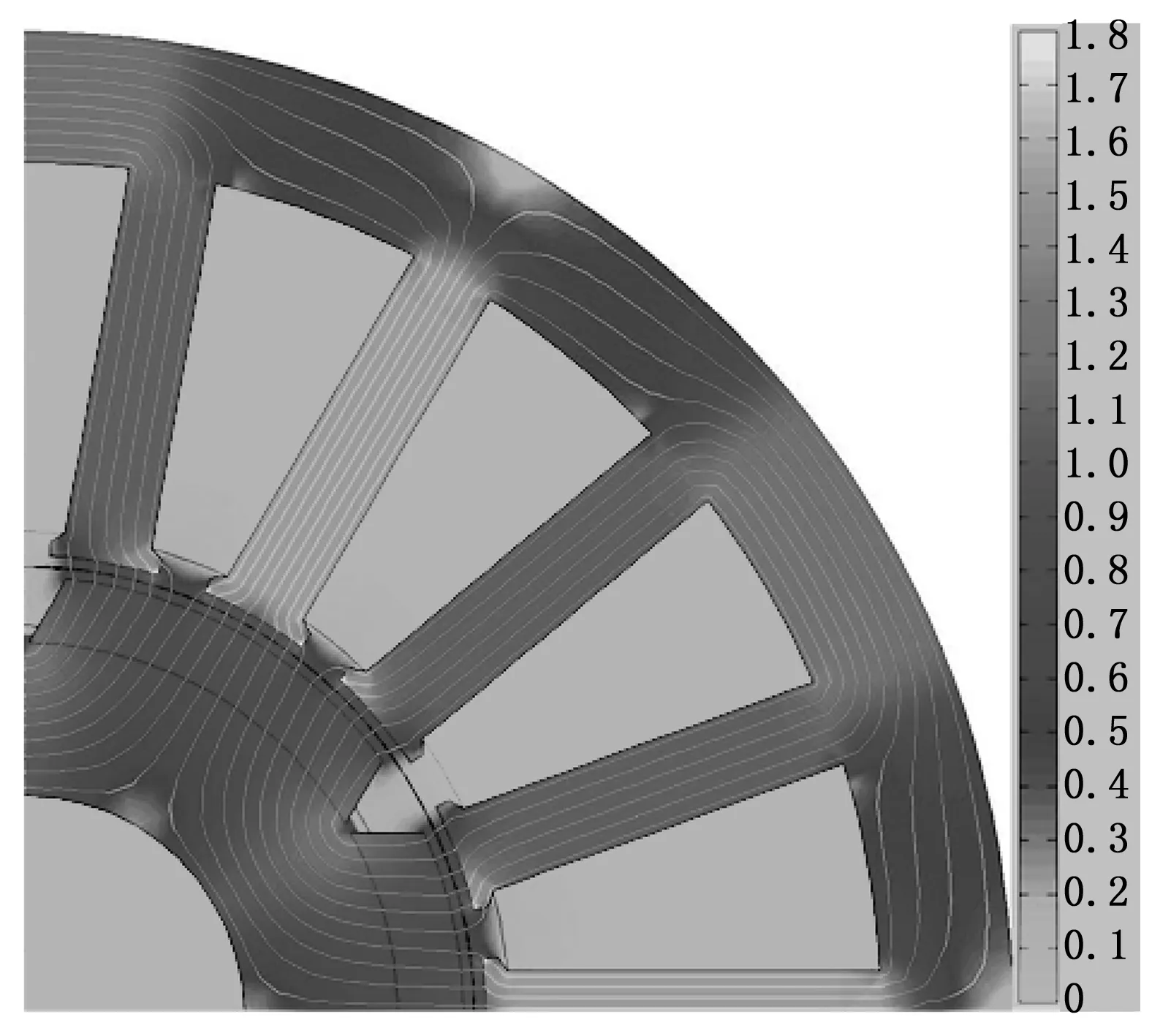
图6 ANSYS有限元分析模型
将其与变压变频控制技术、矢量控制技术、直接转矩控制技术进行实验对比分析。设置PMSM转矩波动抑制前和抑制后A相绕组电流,为了方便对比分析,PMSM转矩波动抑制前后绕组电流有效值保持不变。PMSM转矩波动抑制前后理想输出矩阵对比结果如图7所示。

图7 PMSM转矩波动抑制前后理想输出矩阵
分别使用3种技术分析PMSM转矩波动抑制后的输出结果是否与理想输出结果一致,仿真对比结果如图8所示。
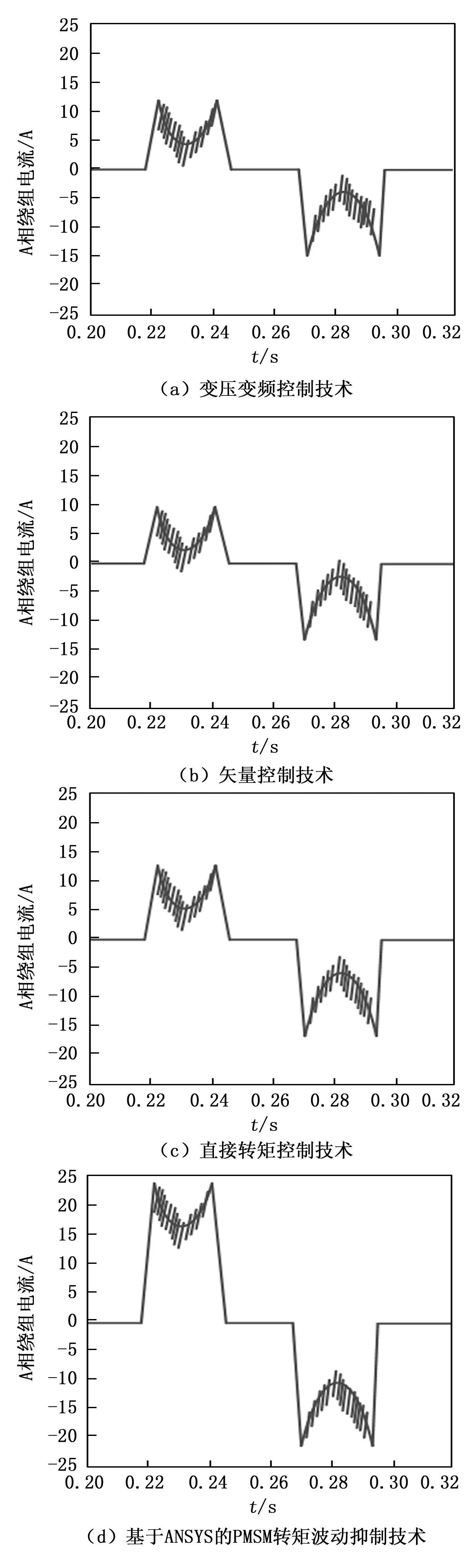
图8 4种技术的PMSM转矩波动抑制后输出结果
5 结束语
基于ANSYS有限元分析软件对工业机器人机械臂进行了自由度、静力承重、转矩波动、力矩分析与研究。而后对PMSM结构,工作流程以及其直接转矩控制技术优化等方面进行研究,并与转矩波动抑制技术相结合优化研究。由实验结果可知,该技术PMSM转矩波动抑制效果明显。提高PMSM效率是工业生产的关注点如何在保持直接转矩控制的特点前提下来进一步优化其控制性能,是一个长期研究热点。如对于直接转矩和磁链观测的进一步细化,是能直接提高PMSM控制精度和减小转矩影响的方法之一。
猜你喜欢
现代农村科技(2022年9期)2022-08-16
汽车实用技术(2022年12期)2022-07-05
舰船科学技术(2022年10期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年2期)2022-04-26
建材发展导向(2022年1期)2022-03-08
防爆电机(2022年1期)2022-02-16
飞控与探测(2021年4期)2021-11-26
电机与控制学报(2018年9期)2018-05-14
农机使用与维修(2014年1期)2014-09-23
