A320系列飞机前轮转弯故障分析
2021-12-21 06:34蔡萱敏陈喜超
航空维修与工程 2021年11期
关键词:跑偏
蔡萱敏 陈喜超
摘要:A320系列飞机前轮转弯故障一直是机队运行中较棘手的问题,尤其是前轮跑偏故障,当跑偏角度不大时机组操作很难发现,导致故障长期存在,故障恶化后将使内部齿轮和齿轮盘磨损超标。本文利用QAR数据,参考系统原理,找出该故障的内在规律并制定监控规则,使故障在萌生时即能被发现并及早解决,杜绝了安全隐患,保证了飞行安全。
关键词:转弯;跑偏;QAR数据
Keywords:steering;veering;QAR data
1 故障背景
利用空客Skywise平台对机队近十年的延误进行统计,前轮转弯故障平均每年有2起,该故障常造成飞机无法转弯,需要拖车拖回,易占用跑道。
图1为近十年前轮转弯故障统计情况,其中两起典型事件如下。
1)2011年12月5日12:36,一架A320系列飞机滑行时报前轮转弯故障,12:48拖车将飞机拖回,根据TSM32-51-00-810-811-A排故,根据AMM32-42-34 PB401更换BSCU,测试不通过;15:30从飞机上拆下前轮转弯传感器(FIN:4GC)送去检修;21: 00更换4GC完毕,调节测试正常;更换前轮转弯传感器(FIN:4GC),调节测试正常。2011年12月8日,该机哈尔滨过站,11:28再次接收到报文信息“WHEEL N/W STRG FAULT”,机务报飞机滑出后前轮转弯失效,飞机拖回,重置后无效,飞机下客排故;14:10分,由沈阳派出排故人员;00:00将3GC和4GC拆下调节;00:50调节后地面测试正常;后续航班取消。4GC拆下后发现齿轮磨损超标。
2)2020年4月16日,另一架A320系列飞机C检出厂执行调机时,机组反馈起飞滑跑阶段和落地后都有左偏现象,配平大约7度。调节3GC传感器后,机组滑行测试正常。后期调查分析发现,C检进厂时正常,但更换前起落架后因未正确调整3GC数据,导致了飞机出厂调机就出现前轮跑偏故障现象。
从以上两起事件可以发现,前轮转弯故障的特点隐蔽性强,地面难以重现,导致地面排故时无法精准定位,故障反复发生,特别是前轮跑偏故障的发生往往没有警告信息,仅是故障现象,而在地面时机务无法通过滑行来测试,故无法验证故障是否真实排除,给运行带来很大影响。同时,由于无法精准定位,为快速排故每次都会更换大量部件,导致很多部件被误换,NFF率非常高。
2 系统工作原理
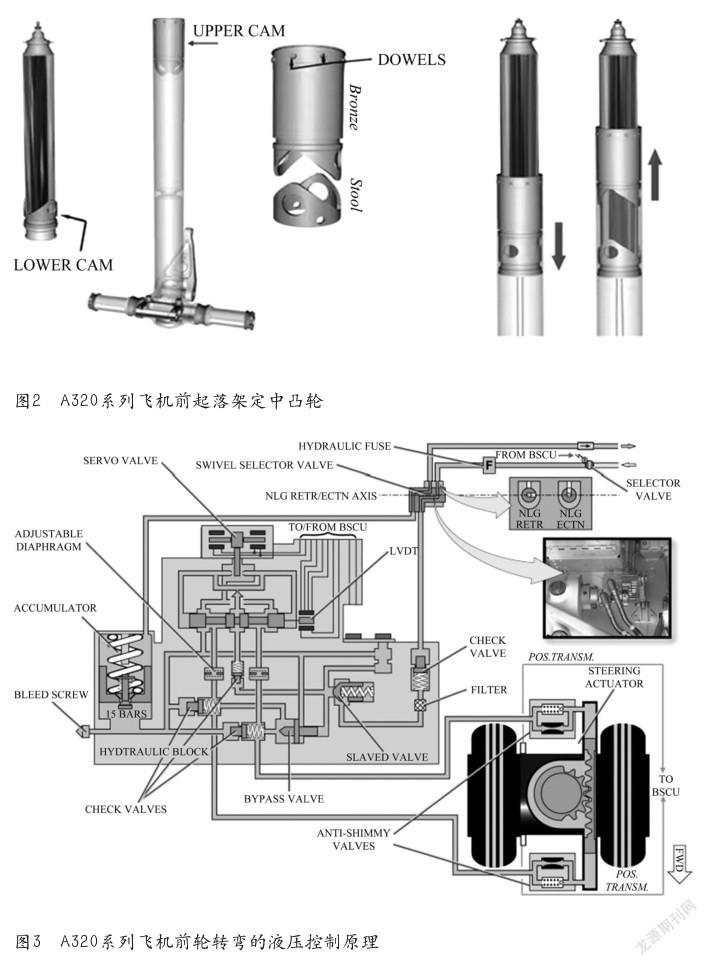
A320系列飞机的前轮转弯控制系统由手轮和脚蹬(输入部分)、BSCU计算机(控制部分)、前轮(控制对象)、3GC和4GC传感器(反馈机构)组成。从图2可见,前起落架中有一个定中凸轮机构,当飞机起飞抬轮后,前起落架完全伸出,随后在定中凸轮的作用下,前轮保持中立位,之后跟随前起收入到轮舱中。

2.1 前轮转弯的地面激活条件
与其他飞机不同,A320系列飞机的前轮转弯并不是只增压对应的液压系统就可操作,而是首先需要满足该系统的激活条件方可正常操控。而该激活的控制通过控制选择控制活门实现,当飞机的两个主起落架被压缩,且至少一台发动机的滑油压力不低压以及拖机模式在正常位时,该活门才被打开。随后需通过转换选择活门使液压进入6GC伺服控制机构。该活门的打开条件是前起落架放出,一旦前起落架收起该活门将会关闭而切断液压来源。如图3所示,液压进入6GC伺服控制机构,通过SLAVED VALVE进入滑阀的中间,在该处通过伺服活门的位置来改变滑阀两端的压力,控制液压进入前轮转弯作动筒的具体腔室,从而实现前轮转弯。其中,滑阀上连接了一个LVDT传感器,BSCU通过控制伺服活门改变滑阀的位置,通过LVDT监控滑阀的位置是否正确响应,从而实现闭环控制。
2.2 前轮转弯的控制过程
一般情况下,在低速滑行时机组采用手轮来控制前轮转弯角度,在高速滑行时机组采用脚蹬来控制前轮转弯角度。两个手轮与脚蹬的控制通过代数叠加的方式实现。转弯的控制原理如图4所示,两个手轮的指令经过解析后直接送入BSCU,脚蹬的信号通过ELAC计算机后进入BSCU计算机。具体控制过程是两个手轮的指令在进入BSCU计算机后首先进行叠加,通过图5的换算将手轮的指令与脚蹬的指令叠加,经过限速控制,然后将该指令以电流的形式输入伺服活门,伺服活门在液压的作用下控制前轮转到指定角度,3GC将该角度反馈给伺服活门的输入端作为负反馈。如果输入的实际位置与指令位置不一致,伺服活门的输入端会有电流输入,如果一致则没有电流输入,即伺服活门的输入是控制指令与实际位置的差值。与此同时,4GC将前轮的实际位置反馈给BSCU的监控通道,如果4GC与3GC的参数值超过6度,就会产生警告,同时切断转弯伺服机构的液压。
3 QAR數据分析
3.1 QAR数据利用原理
由图5可知,手轮的指令换算值如下:
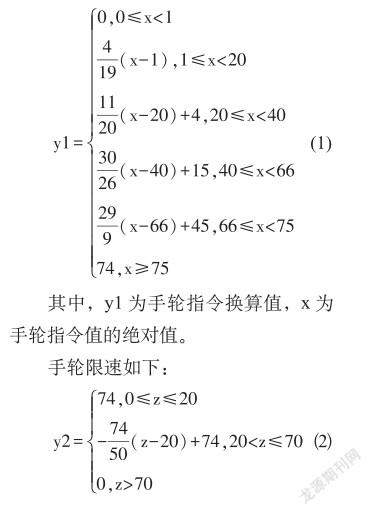

其中,Y为前轮的最终指令值。
根据以上原理,在QAR上查找对应的参数,计算出β指令,与QAR参数上的β指令值相对比,可知BSCU的计算是否存在错误;再与3GC的指令值对比,查看6GC伺服机构的控制是否正确;最后查看飞机在起飞抬轮和降落刚放轮的情况下3GC的值是否在0附近,从而可知3GC的传感器电器零位与机械零位是否一致。即利用QAR数据可以探测出整个转弯系统的部件故障。

关于脚蹬的指令问题,由于脚蹬同属于飞控系统的方向舵控制,因此脚蹬的角度值对前轮转弯的控制也会受方向舵配平的影响。在飞控系统中,不踩脚蹬时方向舵的配平角度等于脚蹬的角度值,这也是机组在遇到前轮跑偏时采用配平来修正的操作原因之一。
3.2 建立监控模型
基于上述原理,利用空客SKYWISE平台上的QAR数据进行验证,输入手轮、脚蹬及轮速参数,计算出理论值,对比QAR参数中BSCU计算出的指令值,查看两者的残差是否符合期望为0的正态分布,如符合则上述公式应用正确。
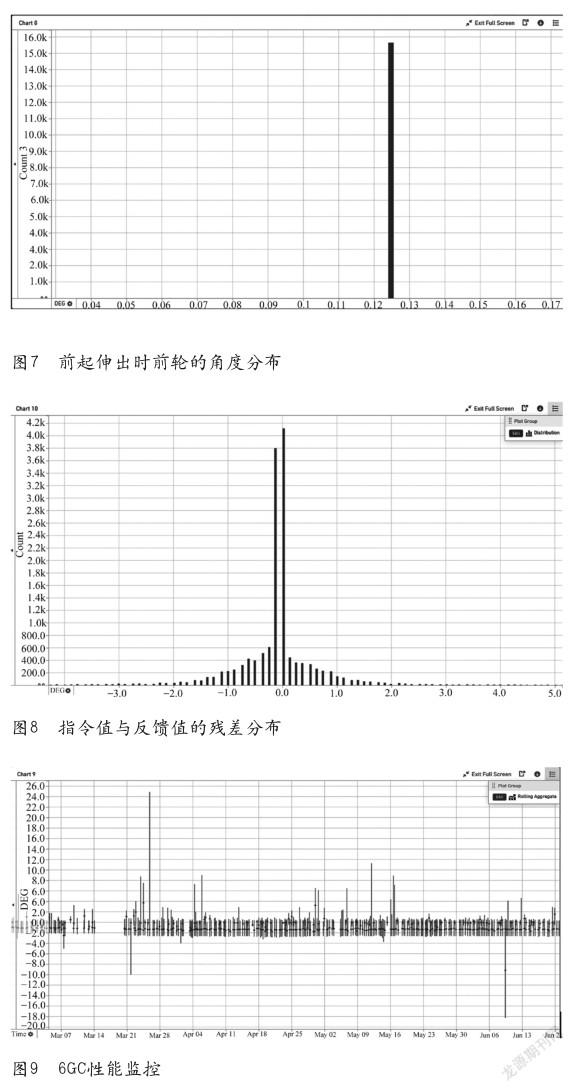
从图6可以看出,残差符合期望为0的正态分布,说明公式合理。接下来验证3GC与机械位置的一致性。由于前起落架的定中凸轮作用,当前起落架伸出时,前轮的机械位置是0,如果3GC的电器位置也是0,说明正常;如果偏移较大,说明有跑偏现象。对前起放下后及自检后的数据进行统计,如图7所示,该飞机在机械零位时,电器的角度是0.124度且非常稳定,说明该监测原理可行。
验证6GC的工作状态算法,将BSCU的指令值与3GC反馈值进行做差,查看残差分布。如图8所示,残差也是近似期望为0的正态分布,说明6GC的工作状态监控算法没有问题。虽然其中非0的数据较多,原因是跑道路面不同或滑行时的侧风等外界因素所致,总体仍为正态分布就表明6GC的监控算法可行。该算法的问题在于不能實时监控,需要监控一段时间内的数据才能平衡外界因素干扰,从而监控6GC的性能状态。
4 监控措施方案
综上所述,利用QAR数据可以监控以下内容:
1)监控3GC是否存在机械零位偏差;
2)监控BSCU指令值是否正确;
3)监控6GC的性能状态。
通过第一点的监控,可以及时解决前轮跑偏问题并提前发现3GC和4GC的齿轮与前起支柱内的齿轮盘之间的磨损问题。通过第二点监控可以准确判断出BSCU计算机是否有问题,从而大大降低BSCU计算机送修的NFF率。通过第三点监控可以及早发现6GC的性能状态,以判断其内部的伺服活门是否存在老化等现象。另外,通过对应监控到的某些异常点,可以查看是否存在因主轮刹车、前轮漏气等造成的跑偏。
对于前起落架内部齿轮磨损严重的情况,可以根据飞机上的4GC与3GC的差值来监控,当监控到波动频繁时,可拆除3GC和4GC,详细检查对应的齿轮和前起支柱齿轮盘的状态。一旦发现齿轮盘磨损严重,需更换前起落架组件,尤其是在翼近10年的老龄飞机的起落架。
参考文献
[1]空客A320AMM维护手册[Z].
[2]赛峰起落架培训手册[Z].
[3] TFU 32.51.00.17 [Z].
[4] ISI 32.51.00.015 [Z].
猜你喜欢
商情(2016年48期)2017-03-12
人民论坛(2016年34期)2017-03-01
中国新技术新产品(2016年23期)2016-12-26
财经国家周刊(2016年13期)2016-07-01
瞭望东方周刊(2016年21期)2016-06-15
企业导报(2015年15期)2016-01-18
企业导报(2015年16期)2015-12-14